無人機航拍三維場景制作
2020-11-06 08:44:04鄭宏捷楊森斌
無人機 2020年9期
鄭宏捷,楊森斌
無人機三維場景制作在軍民用領域擁有廣闊前景,近年來相關行業應用不斷增加,積累了豐富的應用解決方案。為全面了解該技術的實際操作運用方法。本文從無人機準備到三維場景制作的全流程進行闡述,并介紹ContextCapture軟件制作3D模型的簡要方法。
利用無人機進行三維場景重建是近年來發展的新技術,稱為傾斜攝影技術。這種技術改變了原本直接對地面目標進行航拍的方法,按照一定規律采集地面場景中不同角度的圖像,經過軟件計算處理,生成三維模型,并將圖像制作成紋理貼圖,形成符合人眼視覺、接近真實的場景。本文從無人機準備、航拍任務規劃、航拍實施、數據處理四個方面介紹無人機三維場景制作的方法及流程。
航拍前無人機準備
航拍無人機主要有固定翼和旋翼兩種類型。旋翼無人機具有飛行穩定性好、機動性強等特點,成為三維傾斜攝影的主要工具。常見的旋翼無人機有四旋翼、六旋翼等構型,機身可搭載單個鏡頭,有時為增加作業效率,也搭載多個鏡頭,具體使用何種無人機,要根據作業需要和實際情況確定。有的航拍無人機控制器自帶顯示屏,這種控制器一般不能額外安裝軟件,也不能外接平板或手機使用,一般不采用。因為三維場景重建通常需要利用第三方軟件,且使用屏幕更大的平板電腦進行操作較方便。無論選用何種無人機,在飛行前都要充分檢查,以保證航拍任務順利完成,避免發生飛行事故,造成危害和損失。
外場飛行之前,要對無人機進行檢查,避免到現場才發現無人機無法使用。一方面是靜態檢查,主要檢查無人機外觀,確保外觀良好無損壞,螺旋槳沒有裂縫和損壞,任務設備外觀正常,電池電量充足。另一方面要將無人機和地面控制器進行通電聯試,確保控制器遙控按鍵以及控制軟件工作正常,確保指南針、GPS、信號傳輸等系統工作正常,檢查存儲卡空間是否充足。
航拍任務規劃
在飛行前進行航拍任務規劃,是確保航拍任務順利實施,防止飛行事故發生的重要工作,主要包括航線規劃、拍攝規劃和人員安排三個部分。其中,航線規劃和拍攝規劃要統一制定。
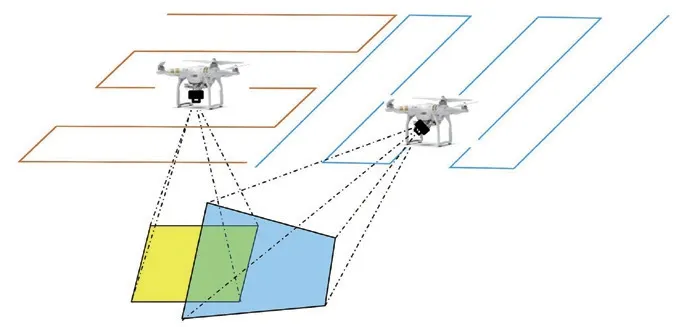
圖1 單鏡頭無人機目標上方和側方航線。
航線規劃
根據航拍任務需要,對無人機飛行航線進行合理規劃是安全飛行,提高作業效率的重要保證。航線規劃要根據拍攝區域周邊環境情況以及地形、地物對航拍圖像的要求,設置合理的飛行高度,規劃安全有效的飛行路徑,在飛行過程中做到心中有數,確保安全無事故。
合理選擇起降場地也是航線規劃的重要內容。合適的起降場地能縮短起飛點到目標區域上空的非拍攝飛行時間。起降場地應選擇平坦、周邊無高大障礙物、人流量較少的位置。
為便于后續三維建模數據處理,無人機航拍圖像要有規律性,這也決定了無人機飛行航線要比較規整。梳子型航線是傾斜攝影建模中運用較多的航線類型,高精度模型要求對地物進行前、后、左、右、上五個方向拍攝。若是精度要求不高,或者受無人機條件限制如固定翼無人機無法直角轉彎,也可以采取其他航線。
拍攝規劃
正確的拍攝規劃是保證航拍圖像質量和可用性的前提條件。拍攝計劃要根據無人機機載相機的類型和參數進行確定。若是五鏡頭航拍相機,相機角度均為固定,只需根據無人機飛行速度、飛行高度、重疊率要求,確定好拍攝時間間隔。飛行時按規劃航線在目標區域上空飛行一次即可。這種鏡頭可節省飛行時間,但飛行到區域外沿時,拍攝了目標區域外的很多無用圖像。若采用單鏡頭航拍相機,則要設置好傾斜角度,不要拍攝到天空,一般情況下航拍相機傾斜角設置為45°。此外,應根據相機視角和飛行高度等參數,以及相關要求設置好拍照間隔。
為加快拍攝速度,簡化拍攝步驟,也可采用視頻拍攝方式,后期軟件可以從視頻中采樣截取幀以獲得圖像。但拍攝視頻時,無人機一般不能記錄其所在位置的經緯度和高度信息,最后生成的三維模型不能顯示地理信息。
人員安排
外場航拍時一般至少安排兩名作業人員。一名負責操控無人機,一名負責觀測。無人機操控員主要負責飛行操控和影像照片的拍攝,觀測人員采用目視觀察的方法查看無人機的空中位置,發現無人機靠近高大建筑物或有其他危險情況時,及時提醒操控員。在條件允許的情況下,也可以多安排一名相機云臺操控員,讓飛行與航拍工作各自分開。
航拍實施
天氣是航拍實施首要考慮的客觀因素,一般不在下雨、濃霧、夜暗等條件下飛行。風速過大影響飛行安全及無人機穩定性,也不適合航拍作業。航拍時機一般選擇光線均勻的中午前后,避免陰影造成影響。
起飛前要充分做好地面檢查工作。一是再次檢查無人機機體及螺旋槳外觀,機身卡扣是否取下;二是檢測機載飛行控制和導航設備的工作狀態,電池電量是否充足;三是根據周邊最高障礙物情況,設置好安全的失控返航高度;四是將遙控器切換到合適檔位。
無人機開始飛行時應進行校飛。起飛時,先使無人機上升到3m左右的高度,然后懸停片刻,再手動操控無人機,檢查前、后、左、右、旋轉、上升、下降各個方向的飛行狀態,以及飛行過程是否順暢、穩定,待各方面都沒有問題后再操控無人機上升到空中。
為保證建模生成的場景色調明暗一致,航拍時要將照片設置為固定的參數,比如曝光亮改為手動曝光,設置固定的IOS等。圖2為無人機控制界面截圖,在設置相機參數時,如果采取自動曝光模式,測光后可以將界面右上角“AE”鎖上。這樣做是為了避免照片之間產生不同的曝光參數,后期制作時造成明暗反差過大。雖然后期處理軟件有調整圖像明暗的功能,但在采集素材階段就應提前做好工作,提高工作效率。
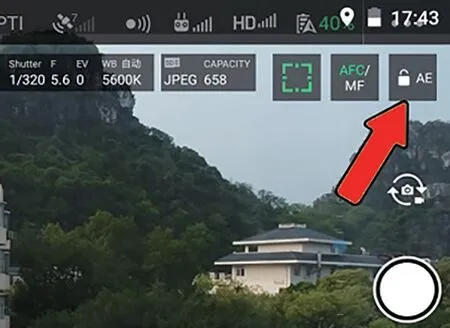
圖2 無人機飛行控制界面。
使用無人機航拍時,需按預設飛行航線和飛行高度,由人員操控無人機完成飛行和圖像信息采集。此外Atizure、Pix4Dcapture等第三方軟件具有根據任務區域自動生成航線、自動控制飛行和航拍等功能,極大方便了航拍工作。針對不同的飛行環境和條件,采用不同的飛行控制方式,既要滿足便捷性要求,也要兼顧安全因素。

圖3 新建區塊界面。
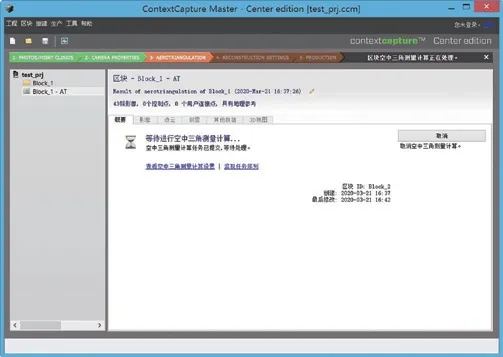
圖4 提交空三后的界面。
數據處理
獲得航拍數據后,要利用軟件生產和制作三維場景。常見的三維場景制作軟件有ContextCapture(Smart 3D)、Pix4D、Photoscan等。下面介紹使用ContextCapture軟件進行數據處理的過程。
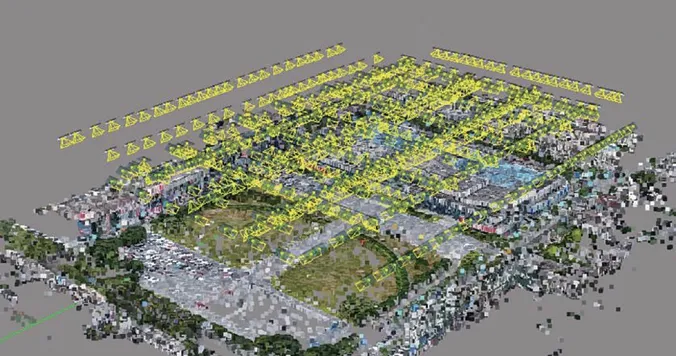
圖5 空三完成后的3D 視圖。
ContextCapture軟件主要包括Master、Engine、Viewer等模塊。Master是一種人機交互界面,相當于一個管理者,具有創建任務,管理任務,監視任務進度等功能,軟件各種操作都在Master中進行。Engine是引擎端,負責處理所指向工作隊列中的任務,可以獨立于Master打開或者關閉,可把它理解為后臺運算單元,是負責數據計算的一種工具。Viewer用于預覽生成的三維場景。
使用ContextCapture處理航片,主要在交互模塊Master上進行加載和設置。其簡要步驟如下。
首先,打開ContextCapture Center Master軟件,出現新建工程界面,點擊新工程,在出現的對話框里輸入“新工程”名稱并保存路徑,需要注意的是新工程名稱不能為中文,否則會報錯。軟件也可以進行集群網絡計算,這時需要在工程目錄里輸入網絡路徑。
第二步,點擊OK后軟件會新建一個工程,并自動建立一個空區塊block_1。進入“影像”選項卡,點擊“添加影像”,選擇目錄或者文件導入航拍獲得的照片。如需集群處理,則需導入網絡路徑下的照片。“設置降低采樣”可以在空三計算時對照片進行重新采樣,以加快速度,建模時仍使用原始分辨率影像,時間和條件滿足要求的情況下一般不設置。在建模失敗時,可以用“檢查影像完整性”功能進行數據完整性檢查。如果航拍照片不包含經度、緯度、高度等位置信息,則需要加載位置文件,從照片文件的詳細信息里查看是否有GPS信息。值得注意的是,如使用圖像處理軟件處理原始圖像,原始照片信息會丟失,會出現無法建模的情況。因此,一般情況下不對原始圖像進行處理。如果遇到霧霾等特殊情況一定要處理,但處理前需要利用MasterUAS等軟件提取文件的ID和位置信息,生成pos文件,而后再進行處理。
第三步,在“概要”選項卡中或右鍵點擊區塊進行空中三角測量。自動建立的空三后的名稱為原區塊名加上AT,點擊下一步,對相關參數進行設置后點擊“提交”。當出現等待界面后,要打開引擎“ContextCapture Center Engine”,只有出現空三計算的進度條,計算機才進行空三運算。
第四步,空三完成后查看概要信息,出現影像信息完整的提示才能進行下一步建模操作。此時可以在3D視圖中查看控制點和相機狀態,檢查結果中有沒有明顯的分層或者交叉的現象。在此過程中,為提高計算的精確性,也可以在測量選項卡中設置控制點。

圖6 模型查看。
第五步,使用“概要”選項卡中右下角的“新建重建項目”按鈕,在空三結果中開啟一個重建。在“空間框架”和“處理設置”選項卡中進行必要的設置,在空間框架選項卡中,要根據計算機內存大小設置切塊,否則可能無法完成建模。比如計算機內存是8G,若一個切塊預測值就有10G,顯然不合適。這也說明在使用軟件進行建模時,一臺性能好、內存大的計算機十分重要。在右側模型顯示區,可以對興趣區域進行調整,保留需要建模的區域,減少無用的計算量。
第六步,選擇Reconstruction1,點擊概要選項卡中的“提交新的生產項目”按鈕。點擊下一步完成各種設置后提交生產。在格式選項中,可以選擇需要的三維模型格式,便于后期使用。最后點擊提交,運行引擎,完成后可以在3D視圖中查看模型最終效果。利用自帶工具可以對模型距離、位置、面積、體積等參數進行測量。

猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
當代陜西(2020年13期)2020-08-24 08:22:02
領導決策信息(2018年50期)2018-02-22 06:17:16
制造技術與機床(2017年5期)2018-01-19 02:49:17
商周刊(2017年5期)2017-08-22 03:35:26
濰坊學院學報(2016年2期)2016-12-01 13:00:11
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16