解析工業機器人的智能化運動技術控制方式方法
2020-11-06 00:55:26趙亮
工業加熱 2020年10期
趙 亮
(寶雞職業技術學院,陜西 寶雞 721013)
人工智能技術在我國相對發展成熟,在人工智能的推動下,我國工業自動化生產逐漸開始使用工業機器人[1]。工業機器人可以按照需求智能化調節運用領域,機器人有曲線運動、多點運動、單點運動等多種運動方式,而且都是可人工控制的[2-3]。工業機器人具備的多種運動模式能夠替代人工,應用于一些高危領域的作業。各個生產領域應用工業機器人,不僅可以有效地完成生產作業,還可以提供安全保障[4]。
1 工業機器人智能運動控制方法的意義
工業機器人的出現是工業生產存在特殊性的產物。傳感器、控制器、機械運動部件、伺服驅動裝置共同組成了工業機器人。工業機器人被廣泛應用于一些高難度、高精密度的工業領域作業,并且取得不錯的成績,工業機器人的應用,改變了傳統手工作業效率低的問題,滿足了一些高危行業的應用需求。
工業機器人智能運動控制方法讓工業機器人實現了智能化,其意義主要表現在以下幾個方面:
1.1 提升工業機器人的生產環境適應性
工業機器人應用于工業生產中,需要其具備與人工作業相匹配的技能。傳統的自動化生產設備體積偏大,生產程序繁雜,機器不是很靈活,無法滿足特定工業生產的發展需求。工業機器人智能運動控制方法不僅讓工業機器人的體積變小,而且更加靈活,工業機器人的生產環境適應性也更強,工業機器人能夠模仿人工操作。工業機器人智能運動控制方法使工業機器人的機械結構與人體結構相似,手臂、關節、頭部都是按照人體結構來設計的。因此工業機器人在從事生產作業時才能擁有與人工相似甚至更高的精準度,讓工業機器人對生產環境有更高的適應性。
1.2 提升工業機器人的兼容性
傳統機器人無法從事精密度高的工業生產作業在于未使用智能運動控制技術,傳統機器人在從事特定生產作業時,無法根據生產需求靈活轉變。工業機器人在應用智能運動控制方法之后,能夠靈活變通使用也更加方便,只需要更換運動系統部件,工業機器人就可以應用于其他工業生產領域。因此智能運動控制技術讓工業機器人的兼容性更強,可以為不同的生產作業提供服務,實用價值更高。
1.3 提升工業機器人性能,降低生產風險
應用智能運動控制技術的工業機器人從事工業生產,讓工業機器人實現了智能化,增加了機器人的靈活性和便捷性。智能運動控制技術的應用,提升了工業機器人的性能,工業機器人智能運動控制就是讓機器人模仿人工從事工業生產作業,一些高危行業和作業需要通過機器人來完成,降低人工操作的風險。
2 改良傳統PID控制的意義和方法
傳統PID控制有很多問題需要改進,曾有相關人員提出實現非線性PID控制。非線性PID控制器的優勢在于可以按照系統的實時狀態靈活變通,其實就是PID增益系數的另一種表達方式,也就是非線性函數,這樣就實現了控制器的靈活變通。研制非線性PID控制器的基本步驟:是通過示范為機器人采集信息,這樣可以獲取對點數據,將對點數據輸入之后,讓機器人的動力學方程更加簡單明了,以此來推導出機器人多個時刻的多關節傳遞函數表達式,便可以獲取PID增益系數,PID增益的非線性變化有一定的規律,選定之后可以擬合,采用的方法為最小二乘法。對關聯內容建立表達式,這就是完整的非線性PID控制器研制步驟。
3 工業機器人智能運動控制方式方法
3.1 提升機器人關節模型算法
擬人運動法是工業機器人的唯一智能運動方法。設計工業機器人的初衷就是讓工業機器人來代替人工完成工業生產作業。這就需要工業機器人有一定的靈活性,提升工業機器人關節模型算法可以滿足這一要求。讓算法更加簡單、有效且匹配度高。提升機器人關節模型算法不僅提高了工業機器人的運作效率,還讓工業機器人變得更靈活,對于精密度較高的生產作業也可以更好的適應。提升機器人關節模型算法優化了工業機器人的關節擺動靈活度,讓工業機器人智能運動控制技術得到提升。
3.2 優化機械傳動結構
工業機器人智能運動方法其中包含的主要內容有機械傳動結構,工業機器人從事工作生產作業時,通過優化機械傳動結構可以增加協調性,機械傳動的效率也更高,有助于提升工業機器人的工作效率。機械傳動結構的準確性、靈活性、穩定性是設計機械傳動結構重點考慮的問題。由于工業機器人的應用領域非常廣,因此在優化機械傳動結構時,要以滿足工業機器人的用途為前提,機械傳統結構布局要按需調整。
3.3 完善DNA計算
有一種剛問世不久的計算思維模式叫DNA計算。DNA計算融合計算與有關生物知識的一種全新計算思維模式,這種計算思維模式可以讓工業機器人對信息數據更好的分析和處理。DNA計算的不同之處在于混合了數據信息,與核酸分子雜交有相似之處。經過篩選的混合數據會出現可利用的串聯數據。DNA計算作為一種全新的計算思維模式,可以幫助工業機器人找到PID最優增益系數。
3.4 提高軟件程序設計水平
工業機器人在設計之初,系統程序設計如果存在問題就會影響工業機器人的運動靈活度,設計出來的工業機器人一般在運動方面無法滿足需求。也就是說設計者在程序設計時,對工業機器人的使用效率沒有充分的考慮。一般來說,設計軟件程序時,要以工業機器人的實際用途為設計出發點,程序設計的功能結構要有清晰的區分。設計的軟件程序要滿足不同的結構功能需求。軟件程序的設計能力,是工業機器人智能運動控制的發展保障。
4 機器人運動控制模塊
綜合應用Windows操作系統和C#高級編程語言,機器人通過編程完成了關節非線性PID控制、神經網絡模型控制、免疫克隆PID控制和DNA—PID控制,這四種控制策略最終都與控制系統軟件融合(見圖1)。
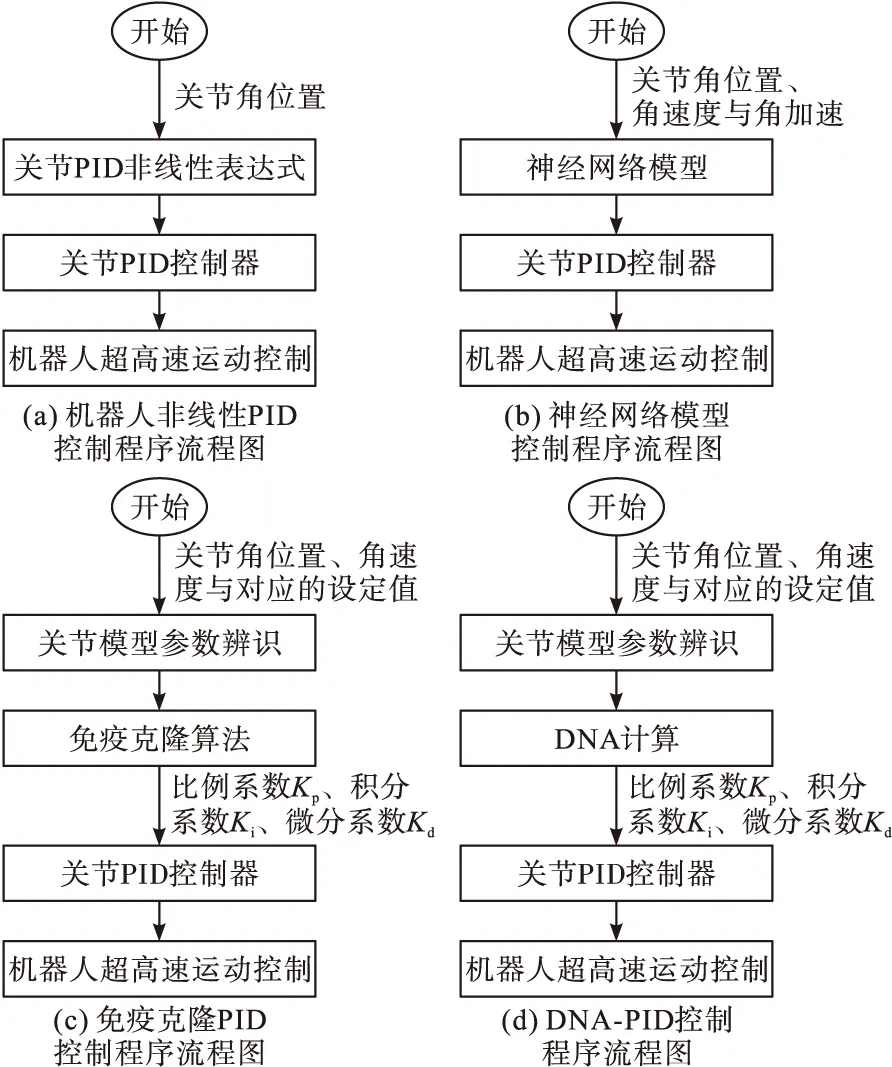
圖1 四種控制策略程序流程圖
非線性PID要求控制系統設定一個關節角采樣時間,并在第一時間獲取到的信息傳輸到程序,程序會按需給出PID增益值,程序會為PID控制器下載PID增益值,機器人運動控制得以實現。與此相近的,在神經網絡模型輸入設定時間內采集到的關節角位置信息和角速度信息,程序按需給出PID值,并實現PID控制。免疫克隆PID控制和DNA—PID控制第一步就是為程序輸入采集到的關節角位置、角速度與對應的設定值,成功辨識被控對象參數,采用與之相對應的DNA算法和免疫克隆算法,獲取PID增益值。DNA算法和免疫克隆算法在應用過程中,用戶按需選擇控制策略,控制系統也會給出相應的控制模塊。
5 機器人運動控制實驗
分別實驗了已知和未知情況下的機器人關節非線性PID控制算法與神經網絡PID模型和機器人自適應免疫控制與DNA控制算法。實驗結果是Windows XP操作系統運行控制系統程序,對計算機處理器的要求是速度在2.4GHz,512MB內存。控制機器人在設定好設計點坐標的軌跡運動,對比采獲的當前點坐標和期望點坐標,可以看出當前運動軌跡出現的偏差(見圖2)。
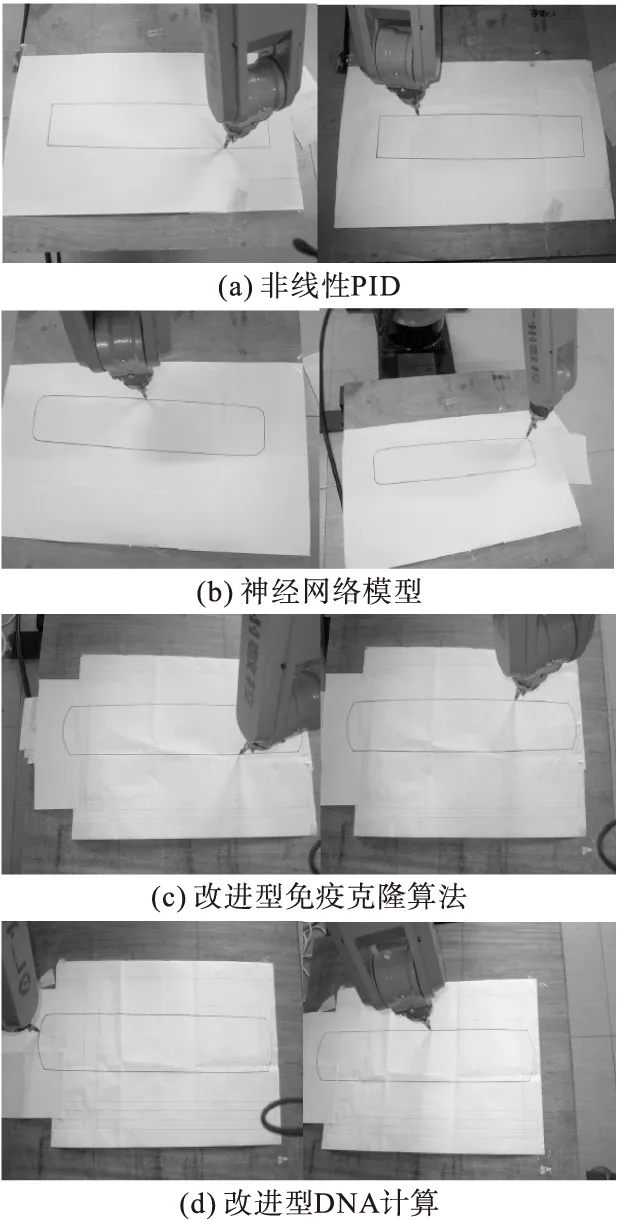
圖2 最終的機器人運動控制實驗
6 工業機器人的發展前景
工業機器人可以代替人工從事工業生產作業,不僅提高了生產效率,也降低了人工操作的風險,尤其是對于精密度高的工業生產而言意義重大,可以幫助企業完成轉型升級。發達國家已經普及了工業機器人,工業機器人不再局限于機械電子制造、汽車制造等領域,采礦、農業生產、物流、軍事等領域也開始大規模應用工業機器人,而且使用成果有目共睹,因此還推動了綜合國力的提升。但是目前我國的工業機器人數量缺口還很大,應用領域有一定的局限性,這也證明了工業機器人在我國還有很大的發展空間,且潛力巨大,在未來不久的日子,我國一定會實現工業機器人的廣泛應用,完成發展目標。
7 總 結
工業機器人在各行各業都有很高的應用價值,對于我國而言,可以通過工業機器人的應用,讓更多從事高強度、高難度、高危險的工作人員得到解放,提高產品的質量和產量同時還能提供安全保障。但是目前我國工業機器人的應用發展還有許多問題亟待解決,而工業機器人智能運動控制方式方法的研究是唯一高效的解決辦法,因此相關技術研發人員和工作人員要不斷提升專業素養,付出更多的努力和汗水研究相關學術知識,讓工業機器人能夠廣泛應用于我國各生產領域,為國家和人民做出貢獻。
猜你喜歡
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國化肥信息(2020年7期)2020-03-19 01:54:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國軍轉民(2017年6期)2018-01-31 02:22:28
故事大王(2016年7期)2016-09-22 17:30:08
機械制造文摘(焊接分冊)(2014年5期)2014-03-20 13:57:44
