散料抓斗全自動行車設計與應用
2020-11-11 08:11:52朱明鈞
銅業工程 2020年5期
朱明鈞
(江西銅業集團有限公司 城門山銅礦,江西 九江 332000)
1 引言
散料抓斗全自動行車系統是目前企業在工廠管理方面所關注的一個新趨勢,是智慧礦山數字礦山的重要組成部分,也是選礦后銅金粉物流高效搬運關鍵工序的重要環節。散料抓斗全自動行車系統的優點是可以減少人員配置、加快物流周轉、減少物料的丟失和損傷等等。但對散料抓斗全自動行車系統的認識不能只局限于行車自動化的本身。散料抓斗全自動行車系統是一個集成了行車自動化、庫管自動化、運輸工具自動化和穩定高效的通訊系統的綜合系統,同時也對物流的管理提出了更高的要求。如果只是關注于散料抓斗行車自動化,而忽略了與散料抓斗行車運輸相關的其它系統的構建和支持,那么實施散料抓斗全自動行車系統很難獲得成功。
2 系統改造方案設計
實施散料抓斗全自動行車系統有如下關鍵工序的設計:
(1)關鍵技術。實施散料抓斗全自動行車系統關鍵技術有抓斗防傾斜裝置、防擺動裝置、安裝變頻器、安裝精確的重量傳感器稱重裝置、自動3D掃描系統、定位系統、自動抓斗的類型等等。
(2)安全裝置。從人身安全角度出發,散料抓斗全自動行車系統要求工作區域四周安裝圍欄,防止人員進入。如果圍欄被打開,散料抓斗全自動行車系統要自動感知并停止運行。
(3)庫管系統。高效的智能的功能強大的庫管系統是支持散料抓斗全自動行車系統穩定運行的必要條件。庫管系統外部連接MES系統、主產線L2系統以接收生產計劃和物料生產實績信息,內部與庫區內的產線連接以完成后續工序的上料和下料的運輸作業,還要根據發貨計劃完成裝車作業。所以庫管系統必須有自動收料、自動尋址、自動發貨,自動優化運輸路徑等功能。可以說,庫管系統是散料抓斗全自動行車系統的大腦,它的優劣直接關系到散料抓斗全自動行車系統的成功與否。
(4)通訊系統。通訊系統要保證穩定高效,否則其它設備和系統再完美,通訊不穩定,散料抓斗全自動行車系統也無法安全運行。通訊系統包括行車與地面通訊的無線網絡及地面各系統之間通訊的有線網絡。特別是無線網絡的搭建。行車自身的設備造就了復雜的電子環境,庫區內的工況與普通環境不同,系統內交互的數據量非常大而且實時性很強。以上這些,對無線網絡設備質量及布局提出了非常高的技術要求。
3 散料抓斗全自動行車系統設計
3.1 硬件要求
實施散料抓斗全自動行車系統至少需要安裝下列硬件設備(見圖1):
(1)X/Y/Z 這3個維度方向的位置傳感器,精度+/- 5cm以內,并增加冗余的X/Y/Z方向的傳感器以保證在某個傳感器故障的情況下散料抓斗全自動行車系統運行暫時不受影響 。
(2)3D激光掃描系統[1],用于識別物料,定位裝料車輛位置。
(3)車輛識別系統。
(4)防搖擺裝置,以避免抓斗投料時物料灑出車外。
(5)稱重系統,避免車輛裝料出現超載或欠載狀況。
(6)變頻器及電機驅動系統。
(7)防碰撞系統,防止行車與行車或與墻壁發生碰撞。
(8)數據處理及傳輸系統。
3.2 PLC系統設計
散料抓斗全自動行車系統要求對所有傳感器的信號進行快速響應處理,因此控制系統的CPU處理周期時間必須要很短。為了保證散料抓斗全自動行車系統的安全運行[2],控制系統需要采用西門子的SIMATIC S7-1200/S7-1500系列產品。
3.3 變頻器
散料抓斗全自動行車系統要求控制行車平穩的運行以執行作業,平穩的加速及減速需要采用變頻控制模式。原舊行車的大車、小車變頻器為安川變頻器,由于散料抓斗全自動行車需要自動定位及防搖擺功能,將整體更換大小車變頻器[3]。
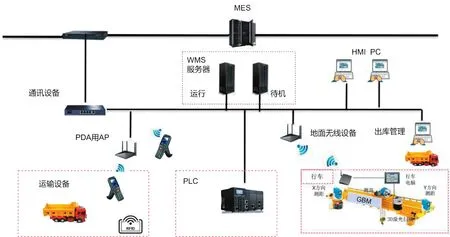
圖1 散料抓斗全自動行車系統車上設備配置圖
大小車控制選用的變頻器品牌:ABB,施耐德,西門子,模擬量模塊控制變頻器頻率,從而實現防搖擺、定位等功能。
起升、開閉控制選用的變頻器品牌:GBM專用變頻器,模擬量模塊控制變頻器頻率,從而實現定位、抓斗沉抓、抓斗追繩等功能。
4 倉庫管理系統WMS設計
智能庫管系統是整個無人料場系統的出入口,也是中央大腦,負責接收業主現場計量稱重與銷售系統(也可人工輸入作業計劃)的出庫計劃。通過接收料堆掃描系統的數據,實時掌握整個料場料堆輪廓,再通過智能調度系統,將作業任務分解成具體的調度命令,將命令發往行車完成相應作業任務。 系統還提供多種管理功能,包括:出料記錄,庫存報表,行車作業統計,報警查詢統計,行車狀態監控等[4-5]。
4.1 倉庫管理系統(WMS)的功能
倉庫管理系統(WMS)最基本的功能就是裝料車輛到達后進行引導車輛進入指定工位,分配作業任務并呼叫自動化行車進行裝料作業,此外WMS系統還必須滿足下列需求:
(1)識別并引導裝料車輛作業。
(2)裝料車輛信息存儲數據庫。
(3)上傳工單至MES系統。
(4)根據生產計劃生成裝料作業指令。
(5)優化裝料規則,自動生成行車作業指令。
(6)對各種運輸工具的管理。
(7)簡潔友好的人機交互界面,便于地面管理人員操作。
(8)報表及查詢功能。
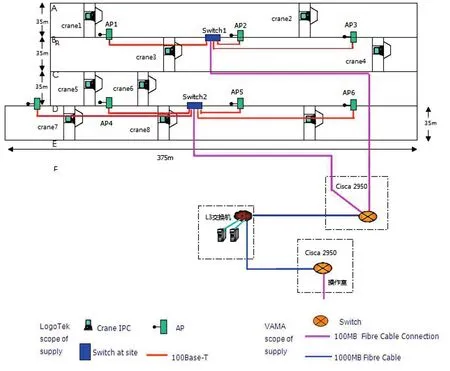
圖2 無線通訊網絡組網示意圖
(9)用戶和權限管理功能。
4.2 倉庫管理系統(WMS)的結構
倉庫管理系統是基于客戶端/服務器的C/S軟件架構。WMS可完全獨立于已有的MES系統運行。WMS擁有自己的數據庫,數據庫使用oracle產品。WMS與L3的生產計劃系統可建立通訊接口,以隨時接收生產下線物料的數據。倉庫管理系統需包含原端口應用程序、后臺數據庫、中間件服務(用于建立與各系統的接口通訊,分發電文等)、車輛識別系統等模塊[6]。
5 通訊系統設計
散料抓斗全自動行車將建立4G LTE5G無線通訊信號覆蓋,行車視頻監控通過無線通信方式與中控室系統連接,庫區固定安裝位置的視頻監控通過CPE或光纖與中控室連接,行車信號控制系統通過無線PN以太網方式與中控室連接,車輛裝料位上方的3D激光掃描設備通過網線連接方式與中控室連接(見圖2)。
散料抓斗全自動行車系統的車上設備與地面系統之間的通訊只能通過無線傳輸方式,其間時刻都有大量的數據交互。散料抓斗全自動行車快速行駛中,必須保證這些數據通訊的穩定性和連續性。特別是在不同的通訊節點之間做接入切換的時候,切換時間要少于100ms。本次采用的通訊方式為工業以太網模式,確保散料抓斗全自動行車與控制系統間的實時通訊,實時響應。基于工業以太網TCP/IP通訊方式[7],控制系統出現與無人行車出現斷開連接時,散料抓斗全自動行車將立即停止作業,確保安全生產。
6 結語
通過抓斗智能化改造的完成,在礦料運輸的應用中,實現智能抓斗實時數據與城門山銅礦數據中心數據實時共享,實現智慧礦山銷售計量系統全無人化。智能抓斗系統與功能強大的中控管理系統相配合,大大提高了城門山銅礦的生產自動化和信息化程度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
故事大王(2016年7期)2016-09-22 17:30:08
自動化博覽(2014年12期)2014-02-28 22:34:39
