工業機器人運動控制系統設計研究
2020-11-13 03:38:57王玉婷
微型電腦應用
2020年10期
王玉婷
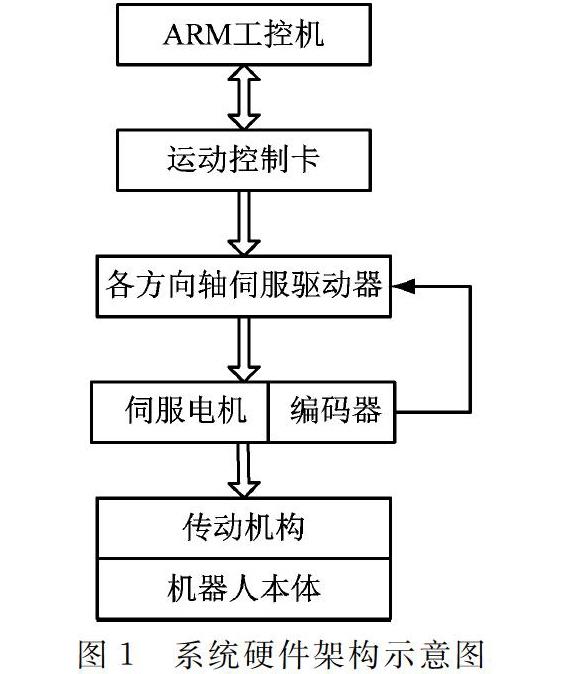
摘要:圍繞機器人運動控制系統展開研究,通過NURBS實時插補算法,完成了機器人運動控制系統的設計和實現過程,通過使用嵌入式ARM工控機作為上位機完成了機器人運動控制系統的開發。系統采選用C++作為開發的編程語言,圖形用戶界面開發跨平臺的Qt軟件,系統控制核心選用了運動控制卡DMC,使用MATLAB對基于NURBS插補算法的運動控制系統進行仿真實驗,驗證了采用NURBS插補算法的控制系統的實用性和通用性,結果表明該系統有效實現了工業機器人對復雜運動的精確控制過程。
關鍵詞:工業機器人;運動控制系統;NURBS插補算法;實現路徑
中圖分類號:TP242.2
文獻標志碼:A
ResearchonDesignofIndustrialRobotMotionControlSystem
WANGYuting
(
InstituteOffice,YantaiAutomobileEngineeringProfessionalCollege,Yantai265500,China
)
Abstract:Thispapermainlystudiestherobotmotioncontrolsystem.ThedesignandimplementationprocessoftherobotmotioncontrolsystemarecompletedbyusingNURBSrealtimeinterpolationalgorithm.TherobotmotioncontrolsystemiscompletedbyusingtheembeddedARMindustrialcomputerastheuppercomputer.ThesystemadoptsC++asthedevelopmentprogramminglanguage,thegraphicaluserinterfacedevelopscrossplatformQtsoftware,thesystemcontrolcoreselectsDMC,andusesMATLABtosimulatethemotioncontrolsystembasedonNURBSinterpolationalgorithm.TheresultverifiestheuseofNURBSiscorrect.Thepracticabilityandversatilityoftheinterpolationalgorithmcontrolsystemshowthatthesystemeffectivelyrealizestheprecisecontrolprocessofindustrialrobotsforcomplexmotion.
Keywords:industrialrobot;motioncontrolsystem;NURBSinterpolationalgorithm;implementationpath
0引言
隨著信息科學技術的迅速發展,工業機器人在控制質量、工作效率、成本等方面表現出了較大的優勢,運動穩定、速度可調節、抗疲勞的工業機器人能夠替代人工完成相應的操作(包括完成一些具備高危險系數的工作),將機器人應用到工業生產中能夠在使生產效率、產品質量得以有效提高的同時顯著降低人工工作量及生產成本,工業機器人已經成為工業現代化發展的重要支撐工具,在各行業中得以廣泛使用,作為一項重要的機電一體化技術機器人運動控制已成為工業生產領域的重點研究方向。運動控制是實現機器人功能的基礎和重點,對機器人的性能起到直接決定作用,工業機器人在實際生產使用過程中易被多種因素干擾(如電、磁等),對工業機器人的設計方案尤其是各項產品參數提出了更高的要求,需確保運動控制系統具備高效運動控制功能及穩定的性能,因此本研究主要對機器人運動控制系統進行了設計。……
登錄APP查看全文
