基于海底線列陣的水下目標(biāo)高精度測向方法
2020-11-14 07:23:06孫向前
艦船科學(xué)技術(shù) 2020年10期
關(guān)鍵詞:信號
彭 水,孫向前,蘇 軍
(中國人民解放軍91388部隊(duì),廣東湛江524000)
0 引言
在水下軍事目標(biāo)探測領(lǐng)域,目標(biāo)的高精度被動定位顯得尤為重要。目前高精度水下目標(biāo)被動定位方法主要采用匹配場定位和方位交叉定位[1–2]。匹配場定位要求對海區(qū)環(huán)境、陣形等要素信息掌握精準(zhǔn),否則海洋環(huán)境、基陣信息失配會導(dǎo)致性能大幅下降[3]。相對而言,方位交叉技術(shù)具有較好的穩(wěn)定性,在實(shí)際應(yīng)用中越來越廣泛,基于方位交叉的高精度定位技術(shù)關(guān)鍵在于陣列的高精度測向能力[4–10]。
本文主要研究基于海底線列陣的高精度測向方法,海底陣具有尺寸不受安裝平臺限制的優(yōu)勢,可以通過增加陣列孔徑提高測向精度。本文采用近場MVDR模型仿真海底線陣的測向性能,重點(diǎn)對其性能進(jìn)行海上試驗(yàn)驗(yàn)證,研究結(jié)果對于海底陣列探測系統(tǒng)建設(shè)具有實(shí)際指導(dǎo)意義。
1 MVDR近場波束形成
MVDR是改進(jìn)的一種高分辨波束形成方法,稱之為最小方差無失真響應(yīng)(Minimum Variance Distortionless Response)。對于大孔徑線列陣而言,很多情況下是在近場區(qū)域完成測量。本文主要介紹基于MVDR的近場波束形成算法,用于提高測向精度。
在陣列的近場區(qū)域,信號的傳播采用球面波模型,各基元接收到的信號幅度和相位不僅與方位有關(guān),還跟距離有關(guān),接收信號可表示為:

式中:Rl為信號源到第l個陣元的傳播距離;c為聲速;M元陣列對K個信號源的響應(yīng)模型可表示為:

式中:ak為陣列對第k個信號源的響應(yīng)向量:

式中:dik為第i個基元與第k個信號源的距離。
MVDR波束形成器是使對準(zhǔn)的目標(biāo)信號以單位響應(yīng)通過,而同時使總的輸出功率達(dá)到最小來實(shí)現(xiàn)主瓣的約束和對干擾的抑制,對應(yīng)的最優(yōu)權(quán)矢量為:

則基陣輸出功率為:

其中:w為加權(quán)矢量;R為基陣幾首數(shù)據(jù)的協(xié)方差矩陣;a為基陣空間掃描向量。
對近場MVDR測向方法進(jìn)行仿真,目標(biāo)信號為低頻線譜130 dB@120 Hz,距離陣中心5 km。
陣列參數(shù):海底直線陣,陣元數(shù)128,設(shè)計頻率分別為120 Hz,陣列位x軸,陣中心為坐標(biāo)原點(diǎn),方位角為目標(biāo)與陣列夾角。
海洋環(huán)境參數(shù):背景噪聲級80 dB@120 Hz,65 dB@2 000 Hz。
圖1 為目標(biāo)方位30°時的MVDR波束形成結(jié)果。由圖可知,陣列主瓣方向?yàn)?0°,3 dB主瓣寬度為1°,測向精度為0.5°;圖2為目標(biāo)方位60°時的MVDR波束形成結(jié)果。陣列主瓣方向?yàn)?0°,測向精度為0.3°。在這2種情況下,陣列均實(shí)現(xiàn)了目標(biāo)高精度測向。
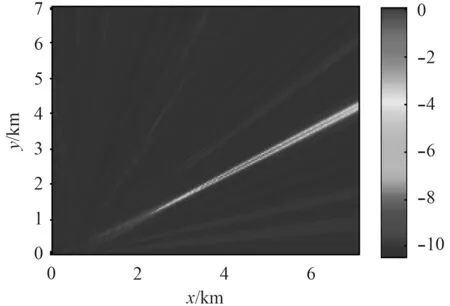
圖1 目標(biāo)方位30°測向結(jié)果Fig.1 Result of azimuth estimation for target at 30°
2 海上試驗(yàn)
2.1 試驗(yàn)基本情況

圖 2目標(biāo)方位60°測向結(jié)果Fig.2 Result of azimuth estimation for target at 60°
2018年3月,在海南萬寧附近海域開展了“海底光纖水聽器陣高精度測向技術(shù)研究”海上驗(yàn)證試驗(yàn)。試驗(yàn)基本情況如下:
參試艦船為布纜施工船和信號發(fā)射船。通過施工布纜船將1條低頻光纖水聽器陣鋪設(shè)至海底,通過海纜連至施工船。光纖水聽器陣的參數(shù)為:陣列總長800 m,128個基元,陣元間距6.25 m,設(shè)計頻率120 Hz。
目標(biāo)信號參數(shù)為:聲源級119 dB,135 dB,頻率60 Hz,120 Hz,240 Hz,每個點(diǎn)位信號發(fā)射時間約2分鐘,換能器吊放深度35 m,目標(biāo)距離陣列中心位置為2~5 km范圍。
布纜船作為信號接收船,完成陣列布放后維持原位,由信號發(fā)射船攜帶低頻信號源在S1~S4點(diǎn)位置發(fā)射信號,系統(tǒng)測量態(tài)勢如圖3所示。通過甲板假設(shè)的DGPS記錄聲源位置,作為目標(biāo)位置真值,海底光纖水聽器陣對目標(biāo)進(jìn)行測向。
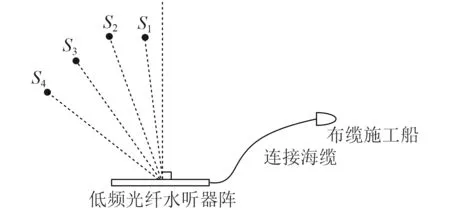
圖3 光纖水聽器陣測量示意圖Fig.3 Situational of fiber optic hydrophone array
2.2 陣元位置標(biāo)校
由信號發(fā)射船攜帶同步聲信號源海底陣低速航行,距離約1 km。航行過程中發(fā)射周期5 s、頻率4 kHz的LFM同步信號,海底陣接收同步信號并進(jìn)行時延估計,通并過球面交匯完成陣元位置解算。
圖4 為海底陣元標(biāo)校結(jié)果,陣元解算位置通過擬合后呈直線分布,與布放過程中記錄的線陣首尾陣元GPS位置基本一致,滿足試驗(yàn)要求。
需要注意的是,陣列的1~38號陣元在布放時發(fā)生了滑落,導(dǎo)致鋪設(shè)到海底后并非直線狀,在試驗(yàn)數(shù)據(jù)分析過程中,沒有采用陣列的1~38號陣元數(shù)據(jù)。
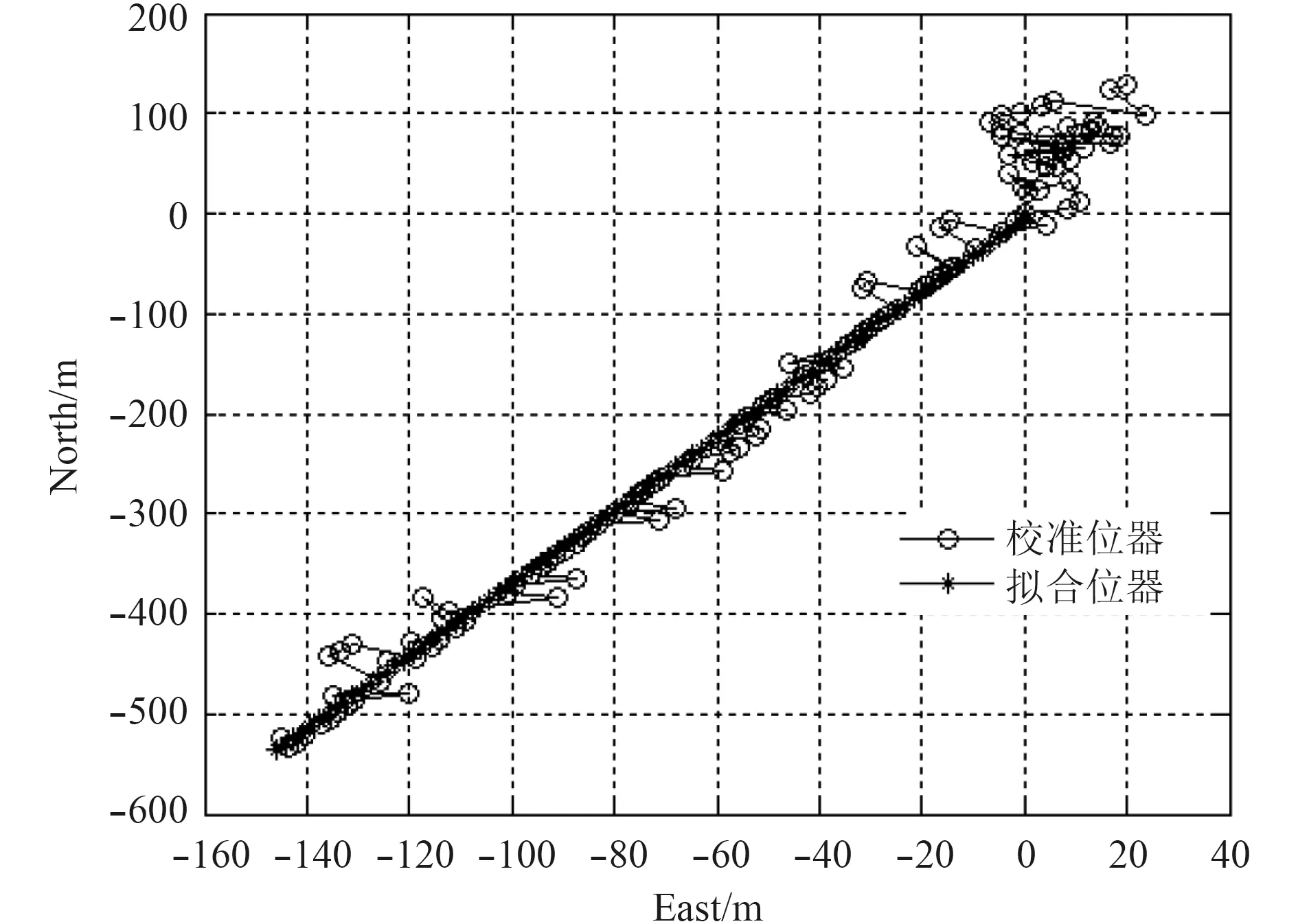
圖4 陣元位置標(biāo)校結(jié)果Fig.4 Calibration result of array
2.3 試驗(yàn)結(jié)果分析
陣列波束形成獲取的LOFAR譜如圖5所示。由圖可知,系統(tǒng)在60 Hz,120 Hz,240 Hz處能夠檢測到清晰的譜線。
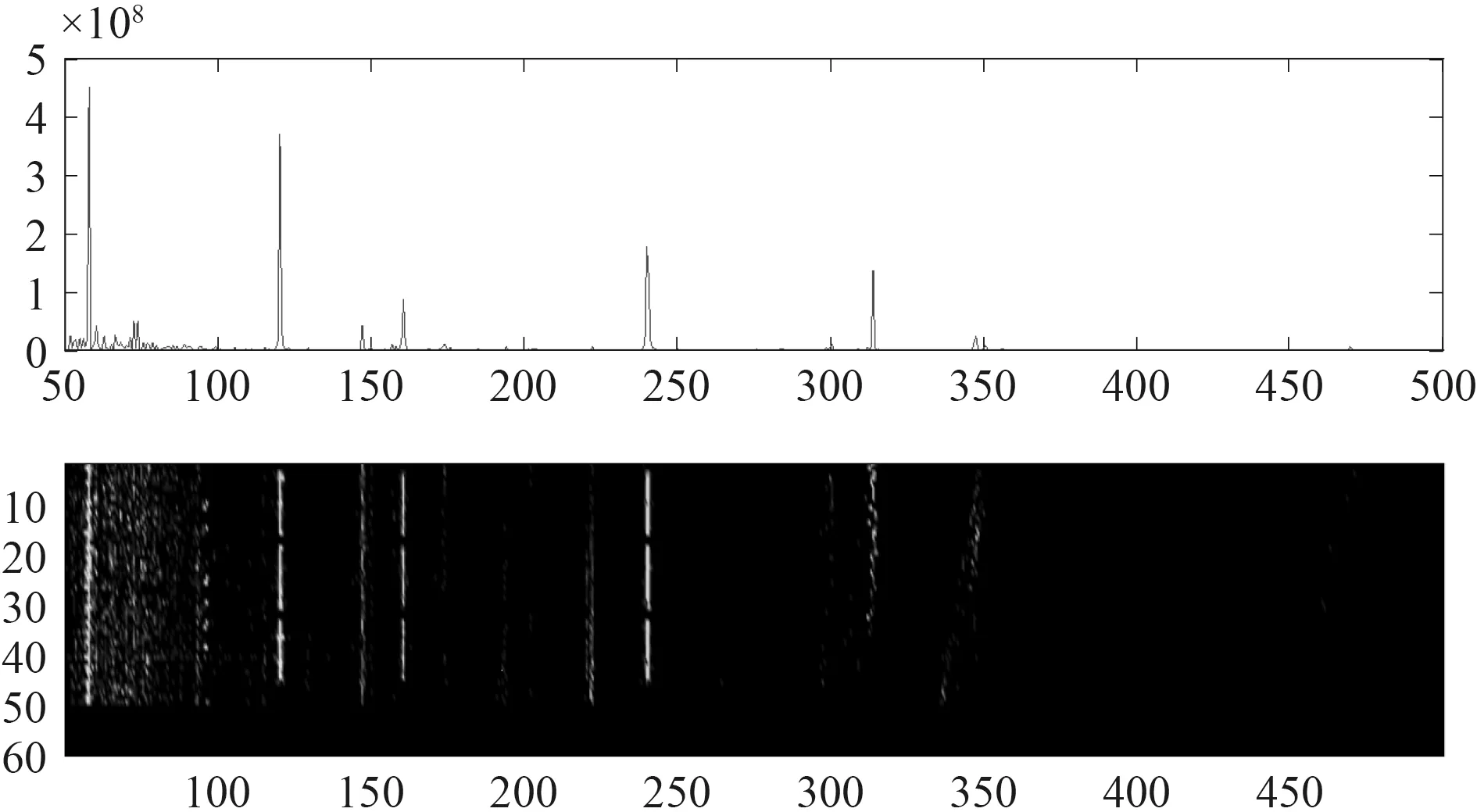
圖5 陣列波束形成LOFAR譜Fig.5 LOFAR of array beamforming
目標(biāo)分別在S1~S4點(diǎn)的方位時間歷程如圖6~圖9所示。數(shù)據(jù)處理模型采用近場高精度波束形成方法,積分時間16 s。
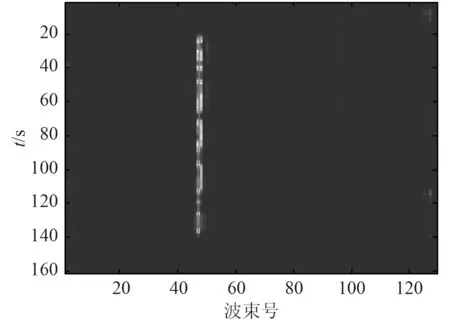
圖6 S1點(diǎn)方位時間歷程Fig.6 Target azimuth timehistory of S1
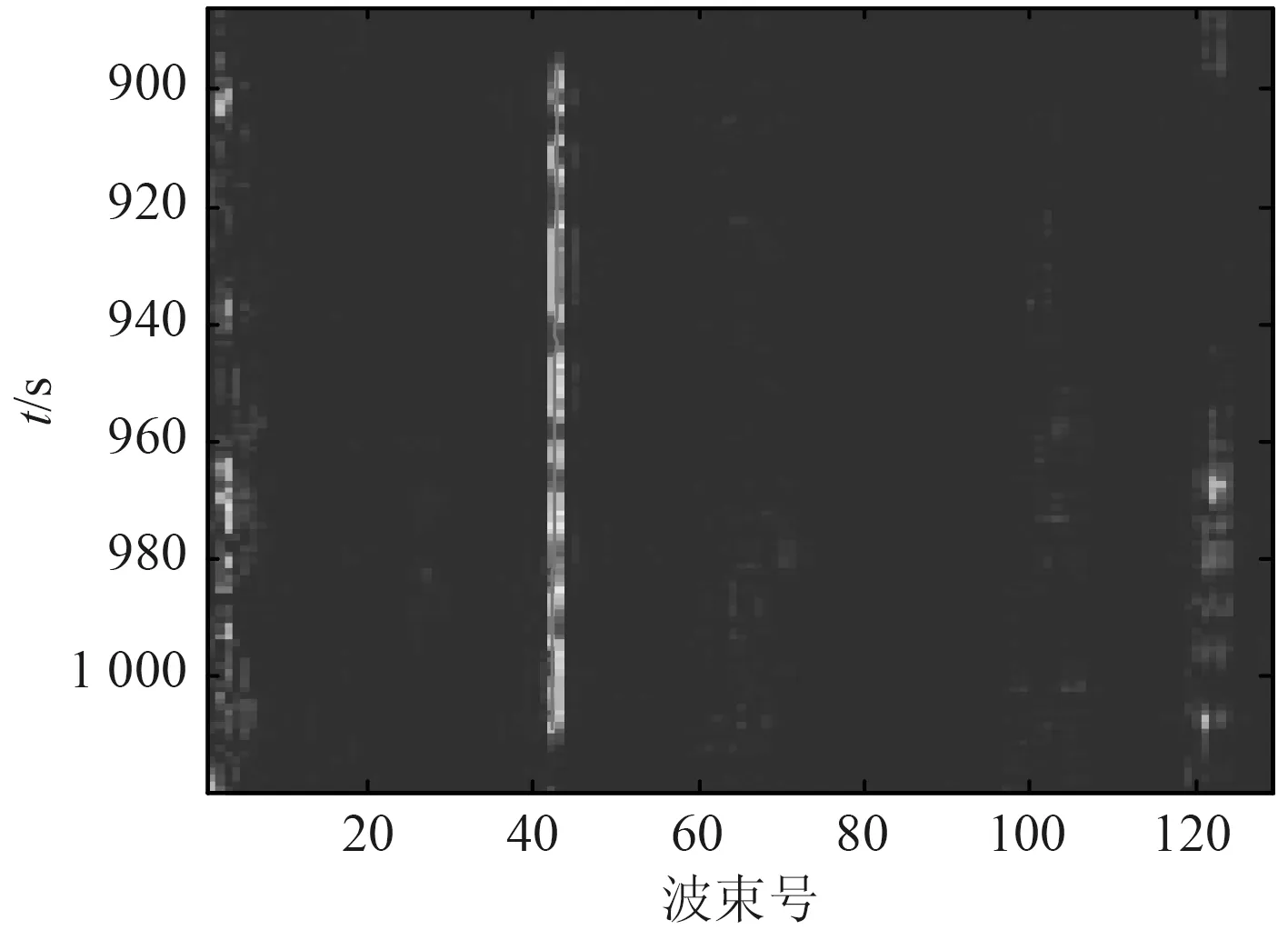
圖7 S2點(diǎn)方位時間歷程Fig.7 Target azimuth time history of S2

圖8 S3點(diǎn)方位時間歷程Fig.8 Target azimuth time history of S3
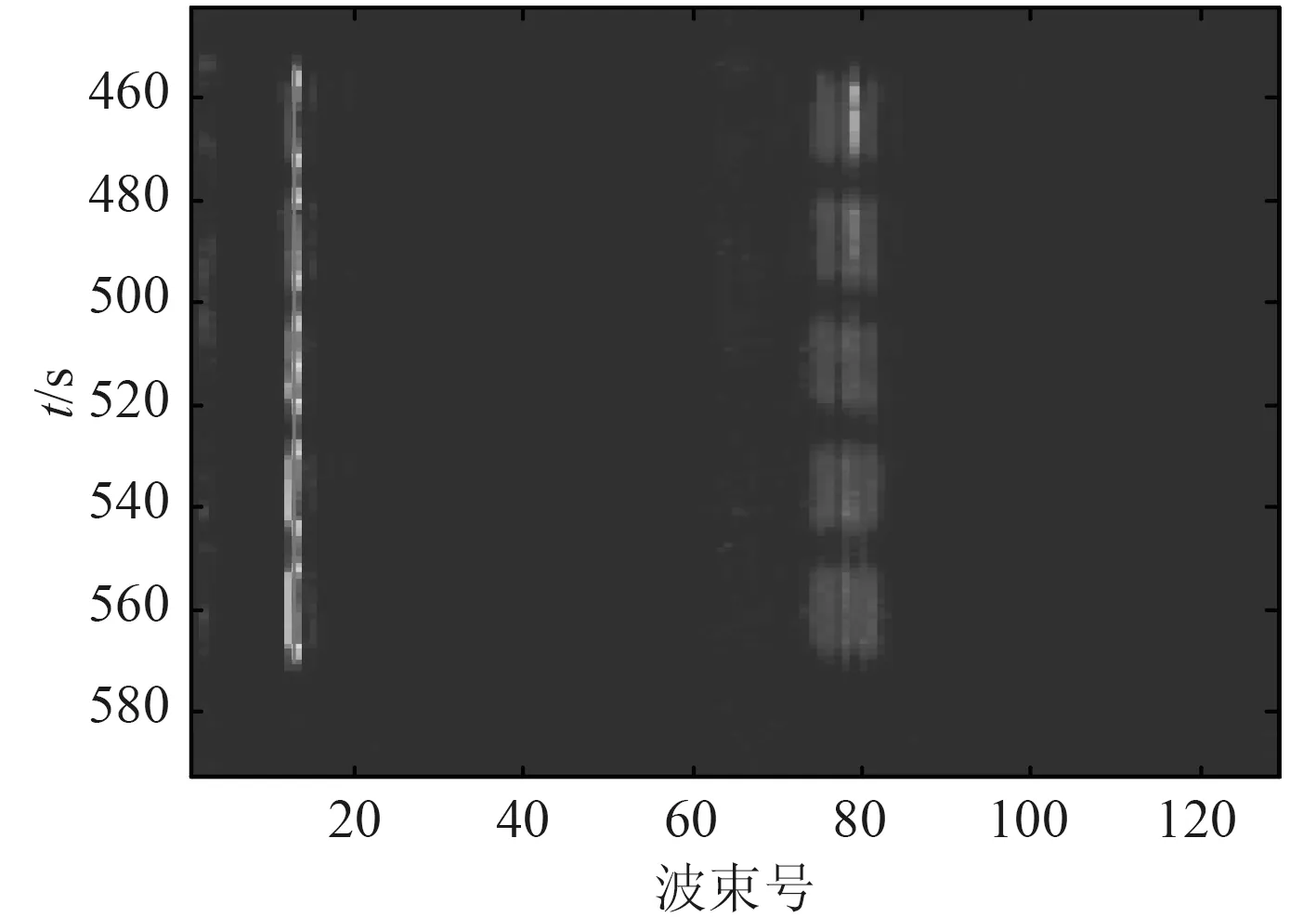
圖9 S4點(diǎn)方位時間歷程Fig.9 Target azimuth time history of S4
由圖可知,在4個不同方位上,海底陣均能清晰地檢測到目標(biāo)信號,其中S1點(diǎn)接近陣列旁射方向,陣增益最高,因此信噪比最高,圖中信號能量最清晰。由于信號頻率的倍頻關(guān)系,部分結(jié)果產(chǎn)生了一定柵瓣。
將陣列測量結(jié)果與聲源GPS進(jìn)行分析比對,并將所有目標(biāo)聲源級的測量結(jié)果進(jìn)行匯總?cè)绫?所示。系統(tǒng)測向誤差統(tǒng)計為信號發(fā)射時段內(nèi)目標(biāo)方位測量值與GPS記錄結(jié)果的均方誤差。
結(jié)果表明,目標(biāo)聲源級為119 d B時,系統(tǒng)測向誤差分別為0.2°,0.2°,0.3°,0.3°;目標(biāo)聲源級為135 dB時,系統(tǒng)測向誤差分別為0.1°,0.2°,0.1°,0.2°。
在這2種目標(biāo)聲源級條件下,陣列均實(shí)現(xiàn)了目標(biāo)高精度測向,且誤差在0.3°以內(nèi),試驗(yàn)結(jié)果與仿真情況基本相符。

表1 不同發(fā)射點(diǎn)位測向誤差Tab.1 Error of azimuth for different target position
3 結(jié)語
本文研究了基于海底線列陣的高精度測向方法,簡要仿真分析了MVDR方法的測向性能,重點(diǎn)分析驗(yàn)證了海底線列陣的實(shí)際測向性能,達(dá)到了試驗(yàn)?zāi)康摹5玫街饕Y(jié)論如下:
在2~5 km距離范圍內(nèi),采用MVDR方法可以實(shí)現(xiàn)128元海底線列陣的目標(biāo)高精度測向,仿真和試驗(yàn)結(jié)果基本相符,其結(jié)果一致表明目標(biāo)測向精度可達(dá)到0.5°以內(nèi)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06