皮帶運輸系統(tǒng)斗口流量控制方法研究
2020-11-18 05:45:08黃琦
環(huán)境技術 2020年5期
黃琦
(海南八所港務有限責任公司,東方 572600)
引言
現(xiàn)階段大部分港口全部采用皮帶運輸系統(tǒng)進行裝船作業(yè),主要裝卸貨種為鐵礦石,基本裝卸流程為:火車—火車棧橋—坑道堆場—坑道斗口—坑道皮帶運輸系統(tǒng)—斜橋皮帶運輸系統(tǒng)—高架皮帶運輸系統(tǒng)—裝船機皮帶運輸系統(tǒng)—船舶[1,2]。在裝卸作業(yè)的過程中,皮帶運輸系統(tǒng)斗口是十分重要的,它是貨物進入皮帶的入口,對整個系統(tǒng)的運行起到十分重要的作用。整個系統(tǒng)主要由三個起點和五個終點組成,通過不同點之間的組合,能夠實現(xiàn)不同方式的交叉?zhèn)魉汀=Y合上述分析,相關專家重點皮帶運輸系統(tǒng)斗口進行改進以及研究,雖然取得了十分顯著的研究成果,但是仍然無法滿足現(xiàn)階段的發(fā)展需求,為此本文提出皮帶運輸系統(tǒng)斗口流量控制方法,通過具體的仿真實驗數(shù)據(jù)全面驗證了所提方法的綜合有效性。
1 方法
1.1 皮帶運輸系統(tǒng)運輸作業(yè)計劃的形成
整個系統(tǒng)的運行全部選用計算式進行控制,在實際運行的過程中,設定運輸作業(yè)的運輸單位為JOB,運輸系統(tǒng)中的各個JOB分別要進行啟動、切換等相關操作。
為了確保皮帶運輸系統(tǒng)中各個終端設備的加料工作順利完成,在具體的過程中,需要設定JOB的數(shù)量,同時設定對應的起點以及終點槽[3],以方便完成運輸作業(yè)總量的統(tǒng)計以及各個設備的運行。
皮帶運輸系統(tǒng)在工作的過程中,確保整個系統(tǒng)穩(wěn)定運行的核心單位即為JOB。各個計算中的JOB能夠處于多種不同的運轉階段,即為:
1)預定中;
2)準備中;
3)執(zhí)行中;
4)順停中。
隨著整個運輸計算的執(zhí)行,需要對JOB進行相應的處理,以確保系統(tǒng)的穩(wěn)定運行。
皮帶運輸系統(tǒng)相關作業(yè)計劃的完成主要依賴于OPS,通過OPS上的相關畫面完成對應的操作作業(yè)計算;也可以通過正在運轉過程中的最后一個預備執(zhí)行計劃自動完成[4]。皮帶運輸系統(tǒng)中任意起點作業(yè)的形成,全部依賴于最優(yōu)先目標槽的形成,在實際應用的過程中,需要對皮帶運輸系統(tǒng)中的全部參數(shù)進行檢測。
運輸作業(yè)計劃的形成主要操作步驟如下所示:
1)相關設備運行狀態(tài)檢測
針對皮帶運輸系統(tǒng)中運輸作業(yè)計劃中全部的起點狀態(tài)進行檢測,如果系統(tǒng)中起點的運行狀態(tài)是正常的,則繼續(xù)進行檢測;假設檢測過程中發(fā)現(xiàn)設備存在異常,則說明運輸計劃無法完成,需要啟動延時處理,直至系統(tǒng)的關聯(lián)設備恢復正常后,再對其進行相關操作。
完成上述操作以后,需要檢測系統(tǒng)中各個終點槽上的小車運行狀態(tài),根據(jù)對應的起點以及終點信息,確定對應的皮帶系統(tǒng),同時需要檢查對應皮帶系統(tǒng)的檢修標志。如果皮帶系統(tǒng)一直處于正常運行的狀態(tài),則能夠獲取終點槽對應的小車狀態(tài)信息,同時得到各個終點所對應的入槽信息。
最后需要檢測各個皮帶系統(tǒng)的運行狀態(tài)、終點槽運行狀態(tài)信息以及故障信息等。
經(jīng)過上述操作后,將可入槽的信息進行統(tǒng)計,當發(fā)現(xiàn)有可入槽的終點時,則說明該計劃可行,反之,則說明當前槽點無可入槽終點,需要對其進行延時啟動處理。
2)終點運輸計劃表的形成
對皮帶運輸系統(tǒng)中不同任務計劃的運行狀態(tài)進行分析,同時組建對應的終點參數(shù)表格以及終點槽參數(shù)表。
3)終點槽在庫量更新
將皮帶運輸系統(tǒng)中正在執(zhí)行計劃的終點槽進行庫量更新[5],則有:

其中切出任務中的終點槽庫量更新計算式為:

式中:
Q0—庫量;
Q1—當前在庫量;
QS—輸送任務量;
V—切出速度;
TS—運行時間。
在系統(tǒng)實際運行的過程中,需要實時掌握系統(tǒng)的運行狀態(tài),同時確定系統(tǒng)的初始運行時間,將其設定為狀態(tài)參數(shù),以實現(xiàn)相關計算的優(yōu)先計算[6]。
4)終點最優(yōu)方案的選取
主要包含以下三個方案,分別為:
①通過不同終點最小切出時間確定最優(yōu)終點,以下給出具體的計算式:

式中:
Tout-max—終點的最大切出時間;
Tout-min—終點最小切出時間;
Ts-min—切出時間對比最小基準。
當系統(tǒng)滿足公式(3)中的相關需求時,需要優(yōu)先選取切出時間最小的終點。
②最優(yōu)先終點的選取
③通過優(yōu)先信息選取最優(yōu)先終點
作業(yè)間優(yōu)先信息為操作人員強制指定的起點—終點優(yōu)先關系,它的優(yōu)先關系大于終點順序常數(shù)表中的終點優(yōu)先選擇關系。
④終點槽最優(yōu)選取
通過作業(yè)指定順序選擇最優(yōu)終點槽,以下給出具體的計算式:

1.2 皮帶運輸系統(tǒng)斗口流量控制方法研究
編碼脈沖調制(PCM)是概念上最簡單,理論上最為完整的編碼系統(tǒng),也是目前使用范圍最廣的編碼系統(tǒng),同時它也是數(shù)據(jù)量最大的編碼系統(tǒng)。
脈沖編碼調制實際上就是將任意一種虛擬信號轉換為數(shù)字信號的特殊形式。首先需要將虛擬信號采用時域上離散時間點的振幅表示,即通過樣值表示;然后將連續(xù)取值的樣值利用離散的幅值近似表示;最后將離散的幅度值轉換為不易受到外界干擾的二進制編碼。以下給出具體的操作過程:
1)抽樣;
2)量化;
3)編碼。
皮帶運輸系統(tǒng)斗口流量控制主要采用的是恒壓控制脈沖編碼調制技術,也就是將皮帶運輸系統(tǒng)斗口流量轉換為二進制的形式進行輸出[7,8],對系統(tǒng)中的一組流量進行控制,將系統(tǒng)中各個控制閥的開口面積調整為相應的比例,同時計算全部控制閥的總開口面積,則有:

結合上述分析可知,當輸出的二進制信號發(fā)生變化時,就能夠獲取和二進制信號對應的開口度,同時獲取信號以及流量之間的比例關系,則有:

PCM皮帶運輸系統(tǒng)斗口流量控制技術能夠將影響流量的一個量進行固定。同時情況下皮帶運輸系統(tǒng)中含有較大的穩(wěn)壓包,它能夠促使p1保持穩(wěn)定不變,其中:

PCM皮帶運輸系統(tǒng)斗口流量控制需要在一定誤差范圍內滿足精度需求,則有:

為了有效避免計算過程中產(chǎn)生的誤差,需要使Δp保持恒定的狀態(tài),同時確保實際流量的輸出值和理論值兩者是十分接近的。
當皮帶運輸系統(tǒng)斗口有流量流出時[9],其中系統(tǒng)受力平衡方程能夠表示為以下的形式:

式中:
D—皮帶運輸系統(tǒng)的控制閥閥芯半徑長度;
k—彈簧剛度;
x0—彈簧的預壓縮比;
x—控制閥閥芯的移動量。
將公式(9)進行簡化處理,則能夠獲取以下計算式:

以下對Δp求偏導,則有:

式中:
Kp—比例系數(shù);
Ti—積分時間;
Td—微分時間;
x(t)—皮帶運輸系統(tǒng)斗口輸入量;
dx(t)—皮帶運輸系統(tǒng)斗口輸出量[10]。
為了方便計算機進行計算,能夠將以上公式改寫為以下的形式:

式中:
n—調節(jié)時間;
Kd—微分系數(shù)。
結合上述分析,需要對皮帶運輸系統(tǒng)斗口流量進行優(yōu)化,則有:
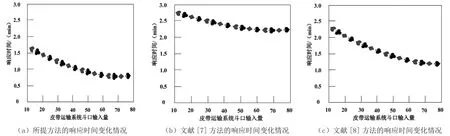
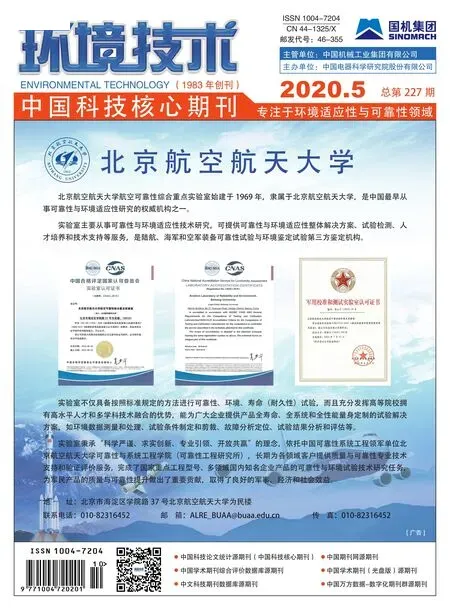
圖1 不同皮帶運輸系統(tǒng)斗口輸入量下各種方法的響應時間對比結果

將二進制編碼的不同數(shù)值轉換為脈沖信號,通過脈沖信號完成皮帶系統(tǒng)斗口流量控制,即:

2 仿真實驗
為了驗證所提皮帶運輸系統(tǒng)斗口流量控制方法的綜合有效性,需要進行仿真實驗,實驗環(huán)境為:Anaconda3.5,Python3.5 以及 Tensor Flow(1.4.0)。
1)響應時間/(min):
實驗選取兩種傳統(tǒng)控制方法作為對比方法進行實驗測試,以下分別給出三種控制方法的響應時間變化情況,具體如圖1所示。
分析圖1可知,隨著皮帶運輸系統(tǒng)斗口輸入量的不斷增加,各種控制方法的響應時間也在不斷發(fā)生變化。相比其它兩種方法,所提方法的響應時間明顯較低,這說明所提方法能夠以最快的速度實現(xiàn)皮帶運輸系統(tǒng)斗口流量控制。
2)運行效率/(%):
為了更近一步驗證所提控制方法的有效性,以下選取運行效率作為評價指標,其中運行效率的取值越高,則說明控制方法的控制時間越短,以下詳細給出三種方法的對比結果,如表1~表3所示。
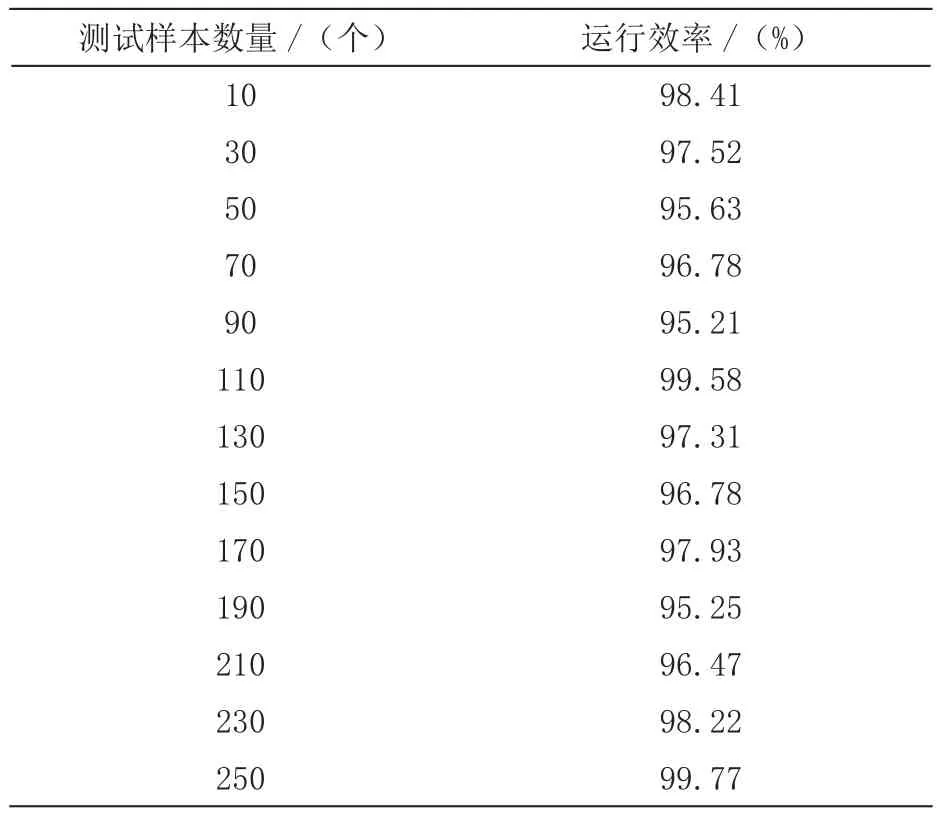
表1 所提方法的運行效率變化情況
表2 文獻[7]方法的運行效率變化情況
綜合分析表1~表3的實驗數(shù)據(jù)可知,所提方法的運行效率在三種控制方法中為最高;文獻[7]方法的運行效率次之;文獻[8]方法的運行效率最低。以上實驗的對比全面驗證了所提方法的優(yōu)越性,同時說明所提方法能夠利用最短的時間完成皮帶運輸系統(tǒng)斗口流量控制。
3)控制誤差/(%):
為了更進一步驗證所提方法控制效果的好壞,以下選取控制誤差作為衡量指標,其中控制誤差越低,則說明控制效果越理想,以下具體給出三種控制方法的控制誤差對比結果,如表4~表6所示。
分析表4~表6實驗數(shù)據(jù)可知,相比傳統(tǒng)的控制方法,所提方法的控制誤差明顯較低,這說明所提方法相比傳統(tǒng)方法控制效果有了一定程度的改善。
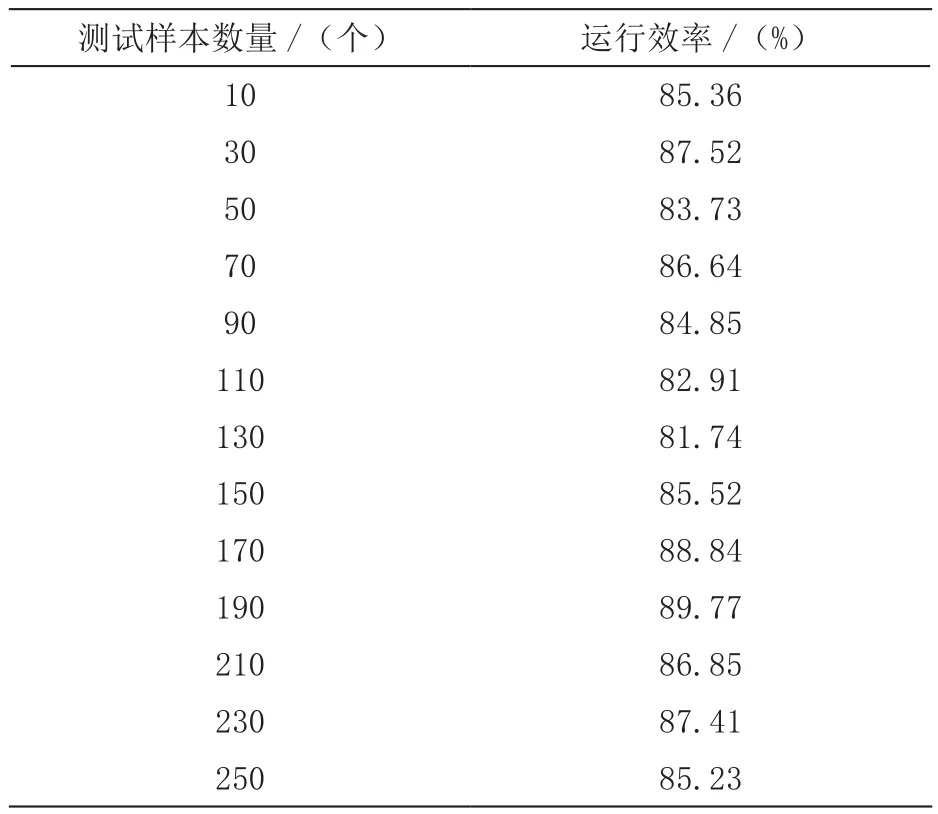
表3 文獻[8]方法的運行效率變化情況
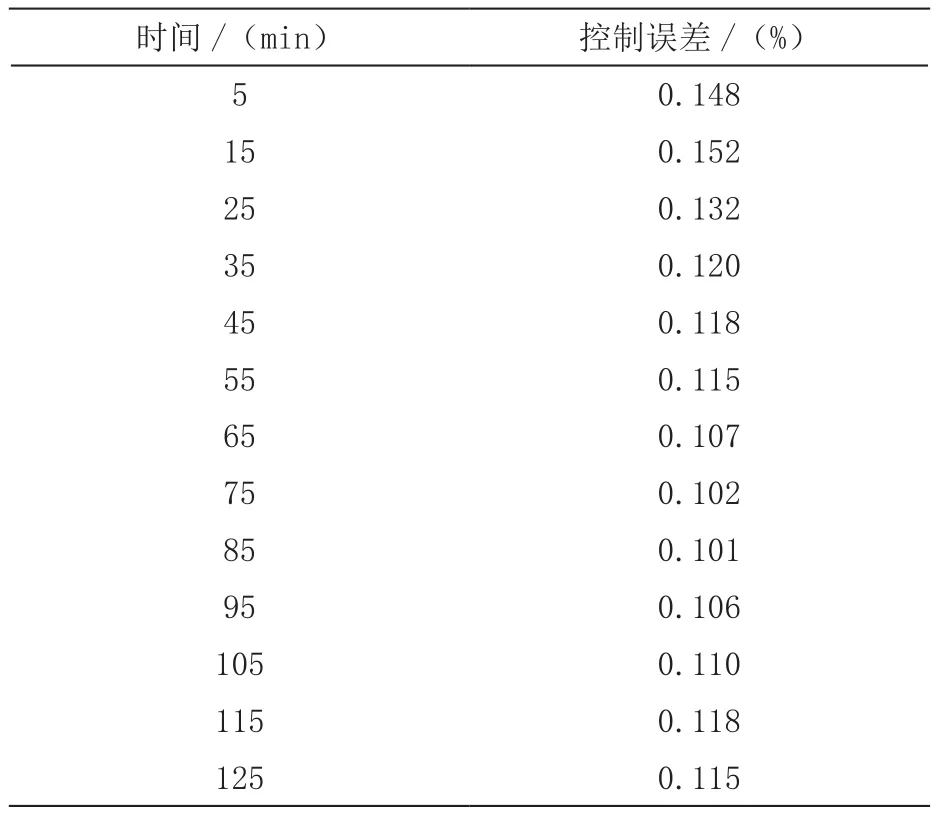
表4 所提方法的控制誤差變化情況
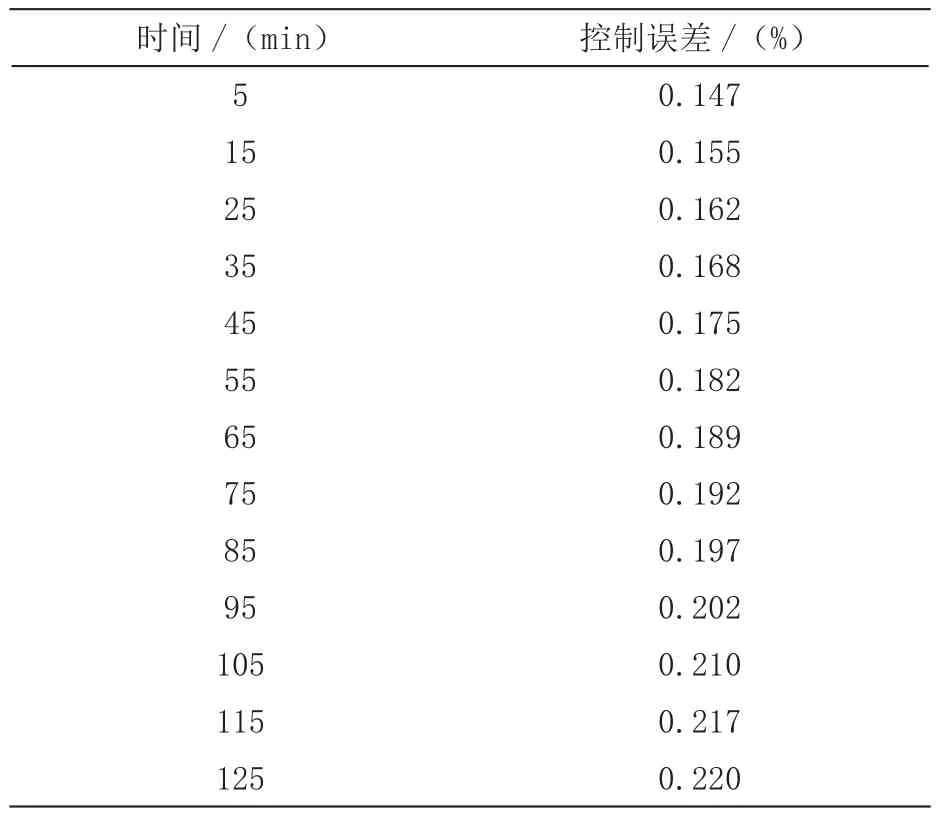
表5 文獻[7]方法的控制誤差變化情況
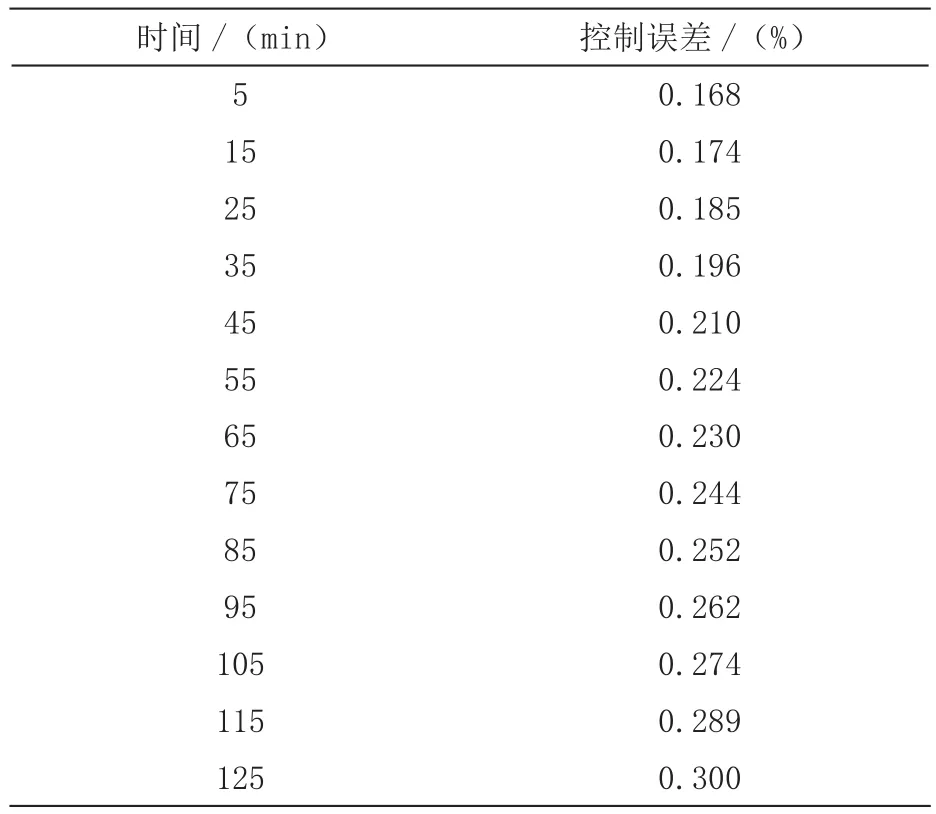
表6 文獻[8]方法的控制誤差變化情況
3 結束語
為了有效解決傳統(tǒng)流量控制方法存在的運行效率較低,響應時間較長等無問題,設計并提出皮帶運輸系統(tǒng)斗口流量控制方法。仿真實驗結果表明,所提方法能夠有效提升控制精度,同時降低響應時間,使其滿足現(xiàn)階段的發(fā)展需求。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
兒童故事畫報(2013年3期)2013-06-24 05:40:30