一種三相電動機的兩相交直交變頻電路及其控制方法
2020-11-20 03:20:10馬匯海孟彥京
實驗室研究與探索 2020年10期
馬匯海, 汪 超, 孟彥京
(陜西科技大學電氣與控制工程學院,西安710021)
0 引 言
交流異步電動機因為簡單、可靠、易于維護等特點在市場上被廣泛應用[1-2]。傳統交直交變頻器可以根據現場要求改變工作頻率實現電動機的平滑啟動和調速[3-5]。傳統變頻器主要由整流、逆變兩部分組成,整流器為二極管三相橋式不可控整流器或大功率晶體管組成的全控整流器,逆變器是大功率晶體管組成的三相橋式電路[6-7]。
為降低成本,減少變頻器的體積和重量,本文提出了一種三相電動機的兩相交直交變頻電路。文獻[8]中提出的三相4 開關整流電路及其控制策略只是用于減小功率脈動平衡整流輸出的電容電壓,并未將其作為交-直-交變頻電路的整流部分進行實驗驗證。而文獻[9-12]中主要是對容易發生故障的調速系統提出了三相4 開關逆變電路和容錯控制策略,直接將直流電源作為逆變電路的輸入電壓,缺少整流電路對逆變輸出的影響。文獻[13-14]中分析了三相4 開關逆變電路在永磁同步電動機中的應用,但并未對三相異步電動機進行分析研究。
基于三相電源和不接地三相對稱負載的電壓原理,分析得到其三相相電壓和線電壓的關系,然后根據這種電壓關系重新構造變頻器的整流和逆變部分,最后搭建仿真驗證其變頻調速功能。
1 三相電動機兩相變頻電路結構及工作原理
三相電動機的兩相交-直-交變頻電路圖如圖1 所示。這種電路結構采用普通單相不可控整流電路作為整流部分,將串聯濾波電容的中點作為參考點與電源的C相以及三相電動機的W相參考點相連接,采用普通三相電壓型全橋逆變電路的4 個開關管作為逆變部分,中間部分為兩個相同容量的電容C 串聯的電路,兩相逆變輸出分別對應于電動機的U相和V相。
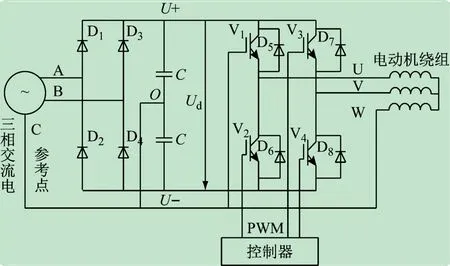
圖1 變頻器主電路結構
對于整流電路而言,以C 相為參考的直流電壓為U+和U-,相當于形成一個帶中點的正負電源。對于逆變輸出而言,以串聯電容的中點(交流電源的C 相和電動機的W 相)為參考點,輸出一個互差60°的SPWM波,與電源的三相供電原理一樣,對電動機而言形成一個了實際的三相對稱波形,并產生旋轉磁場驅動電動機旋轉[15-16]。逆變電路的控制方法采用的是雙極性SPWM調制方法,和普通的三相調制方法不同的是普通三相橋式逆變的調制波是3 個相位互差120°的正弦波,而該電路結構只需要兩個互差60°的正弦波作為調制波。
2 整流和逆變電壓分析
2.1 整流側電壓分析
單相不可控整流電路的輸入端A 相、B 相以三相交流電的C相為參考點,uAC、uBC作為整流電路的輸入電壓,相位相差60°。整流電路的輸入電壓波形如圖2所示,當uAC>uBC時,二極管D1和D4導通;當uAC<uBC時,二極管D3和二極管D2導通,圖3 是接入兩個串聯濾波電容前直流母線U+和U -對參考點C 相的電壓u+C和u -C,為了得到較為穩定的直流電壓,本變頻電路將兩個濾波電容先串聯再并聯在直流母線端,然后取電容的中點與三相電源的C 相和三相電動機的W相相連接作為整個電路的參考點,圖4 是接入兩個串聯濾波電容后直流母線U+和U-對參考點C 相的電壓u+C和u -C,由于電容的存在電壓不能突變,這里直流電壓的平滑程度取決于電容的大小。
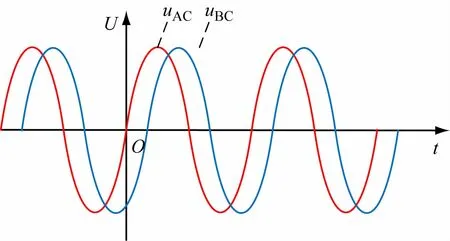
圖2 整流電路輸入電壓波形圖
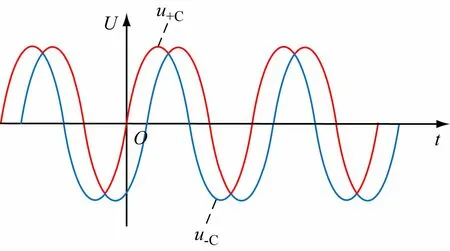
圖3 接入濾波電容前直流母線正負端對C相電壓
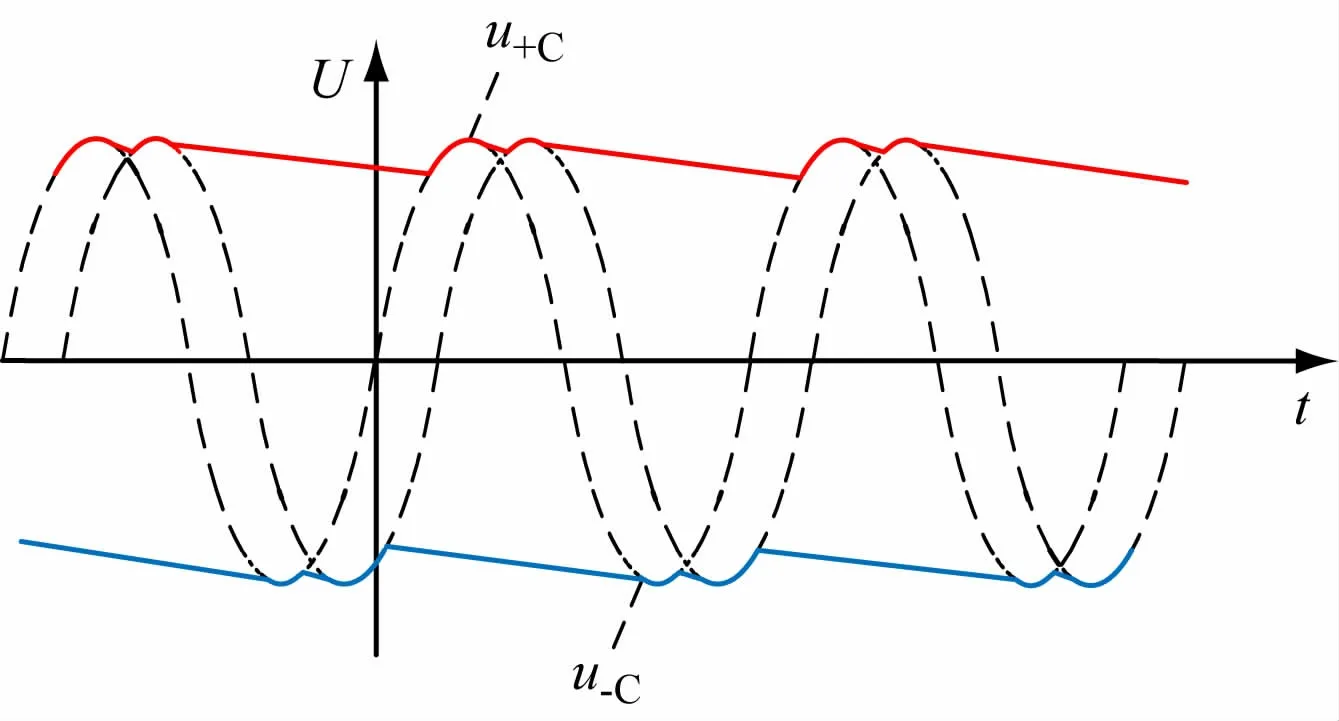
圖4 接入濾波電容后直流母線正負端對C相電壓
2.2 逆變側電壓分析
當以電動機W 相(電源C 相)為參考點時,電動機若要形成旋轉磁場,其輸入電壓關系須為圖5 所示,若要通過雙極性SPWM控制方式得到相位相差60°的逆變輸出電壓uUW和uVW,只需控制兩個調制波的相位互差60°即可。對于U相而言,當調制波大于載波時,開關管V1導通、V2關斷,此時U相對W相的電壓uUW應為uAC;當調制波小于載波時,開關管V1關斷、V2導通,此時U相對W相的電壓uUW應為uBC。
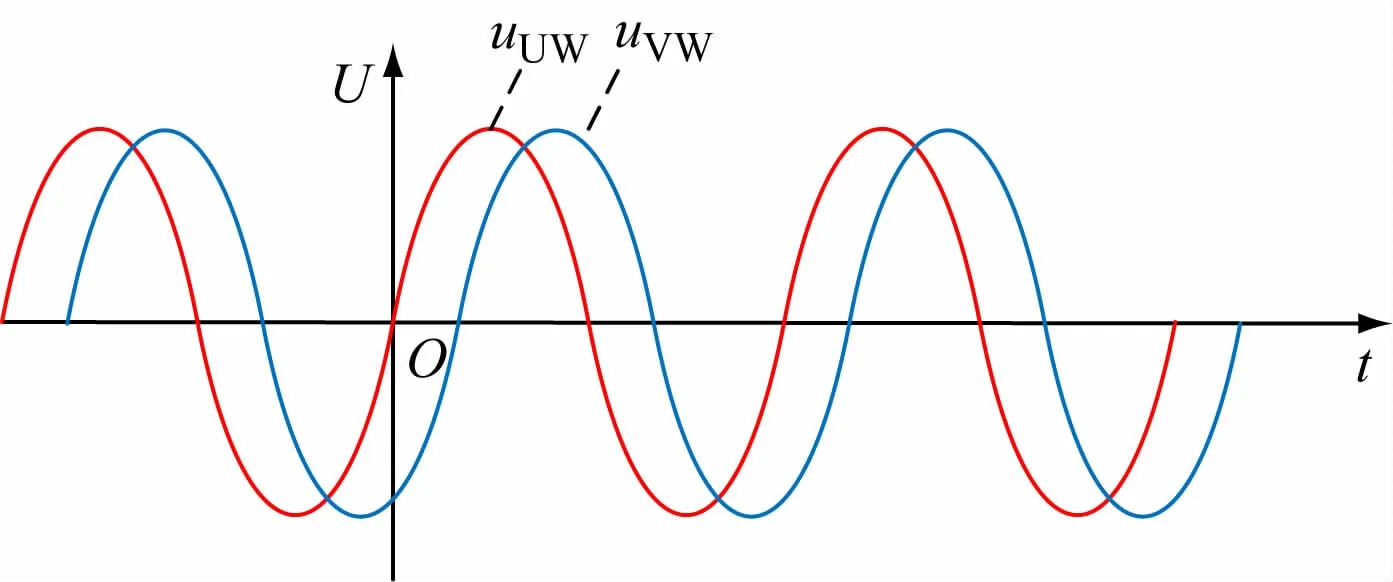
圖5 電動機輸入電壓
對于V相而言,當調制波大于載波時,開關管V3導通、V4關斷,此時V相對W相的電壓uVW應為uAC;當調制波小于載波時,開關管V3關斷、V4導通,此時V相對W相的電壓uVW應為uBC。
3 濾波電容的選取
3.1 等效電阻的計算
對于輸出功率為P 的逆變器,為計算方便,將其直流側輸入端阻抗用一個純電阻R等效,則有

式中,UPN為等效電阻R電壓峰值(V)。
對220 V 系列的變頻器來說,由于三相輸入線電壓為220 V,故UPN= 2202 V,但本文所提出的變頻結構是以串聯濾波電容的中點作為參考點,并非以三相對稱電源的中性點作為參考點,此時UPN應為uAC和uBC峰值電壓之和,即UPN= 2 × 380 ×2 V。
3.2 電容充放電過程
由于整流后的直流電壓有波動,這里假設加濾波電容后直流母線電壓Ud的波動幅度為a%,則有

式中:a%為直流母線電壓最大波動幅度;Udmin為直流母線最小電壓幅值,V。
本文提出的變頻電路雖然是以三相電源為輸入電壓進行整流和逆變,但是整流端以電源C 相為參考時,整流部分可以看作是單相不可控整流電路,故當電路的工作狀態已經處于穩態時,電容兩端的電壓如圖6 所示,在t2時刻,電容電壓達到最大值,然后電容開始放電,在t3時刻,電源電壓下降到最小值,但是電容電壓依舊大于電源電壓,電容繼續放電,在t4時刻,電源電壓等于電容電壓,電容開始充電,在t4時刻電容電壓的大小為UPN(1 - a%)。

圖6 電容電壓波形
3.3 電容容量的計算
由圖(6)可知電容放電時間為t4- t2,而t4- t2=(t3- t2)+(t4- t3)=(t3- t2)+ t1= T/ 12 + t1。當f =50 Hz時,T = 0.02 s。由上述分析可知

由式(3)知,當a確定時,則可根據式(4)計算tf

式中:t1為電容開始充電時間(s);tf為一個周期內電容放電時間(s)。
當濾波電容C開始向逆變器放電時,電容電壓達到峰值,此時U0= UPN= 2 × 380,這里U0近似為放電前電容上的電壓,則由此可得放電時電容電壓方程為

這里求解得到的C 是直流母線端兩個串聯濾波電容的容量大小,故單個濾波電容的容量大小應為2倍的C。當仿真所用電動機功率為4 kW,直流母線電壓波動a取5 時,通過上述分析計算得C≥608 μF,則兩個相串聯的電容容量應為C1= C2≥1 216 μF。
4 仿真驗證及分析
4.1 系統仿真
分析了三相電動機兩相變頻的原理和控制策略,在Matlab仿真軟件中搭建仿真模型如圖7 所示。
本次仿真所用電動機模型參數:電動機功率4 kW,線電壓有效值380 V,工作頻率50 Hz,額定轉速1 430 r/ min,極對數P = 2,定子電阻1.406 Ω,轉子電阻1.395 Ω,定轉子漏電感5.839 mH,勵磁電感172.2 mH。兩個濾波電容選取1.5 nF,電動機的負載轉矩取3 N·m。
4.2 結果分析
當電動機在工頻下平穩運行時,直流母線正負端對參考點的電壓u+C和u -C和電動機輸入電壓uUW和uVW如圖8 所示,直流電壓u+C和u -C與上述圖4 分析結果一致,觀察坐標計算可知電壓uUW和uVW相位互差60°,與上述圖5 分析結果一致。
本文取電動機U相定子電流進行分析,其電流波形如圖9(a)所示,在0 ~0.15 s時間段內由于電動機直接啟動,啟動電流波動較大,從0.15 s 開始電動機逐漸完成啟動過程并趨于平穩運行,此時取電動機平穩運行狀態下0.2 ~0.4 s 的定子電流波形進行諧波分析,諧波分析結果如圖9(b)所示,橫坐標為頻率,縱坐標為各個頻率諧波與基波比值,由圖9(b)可知,電動機U相定子電流的諧波畸變率為7.41%。當定子電流的諧波畸變率在10%以下時,可以認為電動機是正常運轉的,故證明了該電路結構的可行性。
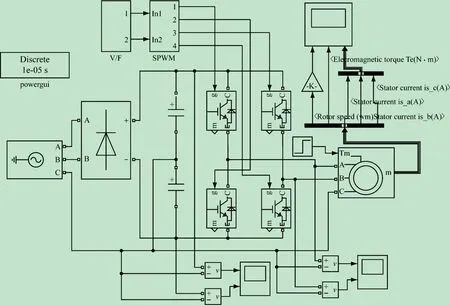
圖7 仿真模型
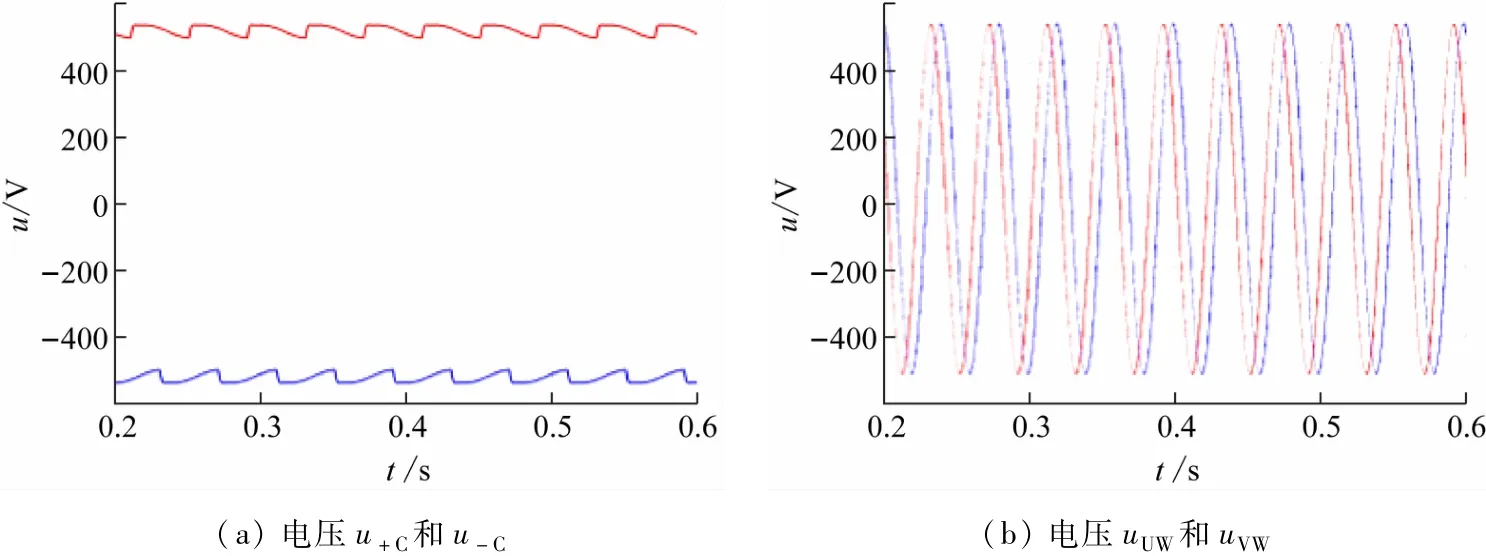
圖8 直流母線對參考點電壓和電動機輸入電壓
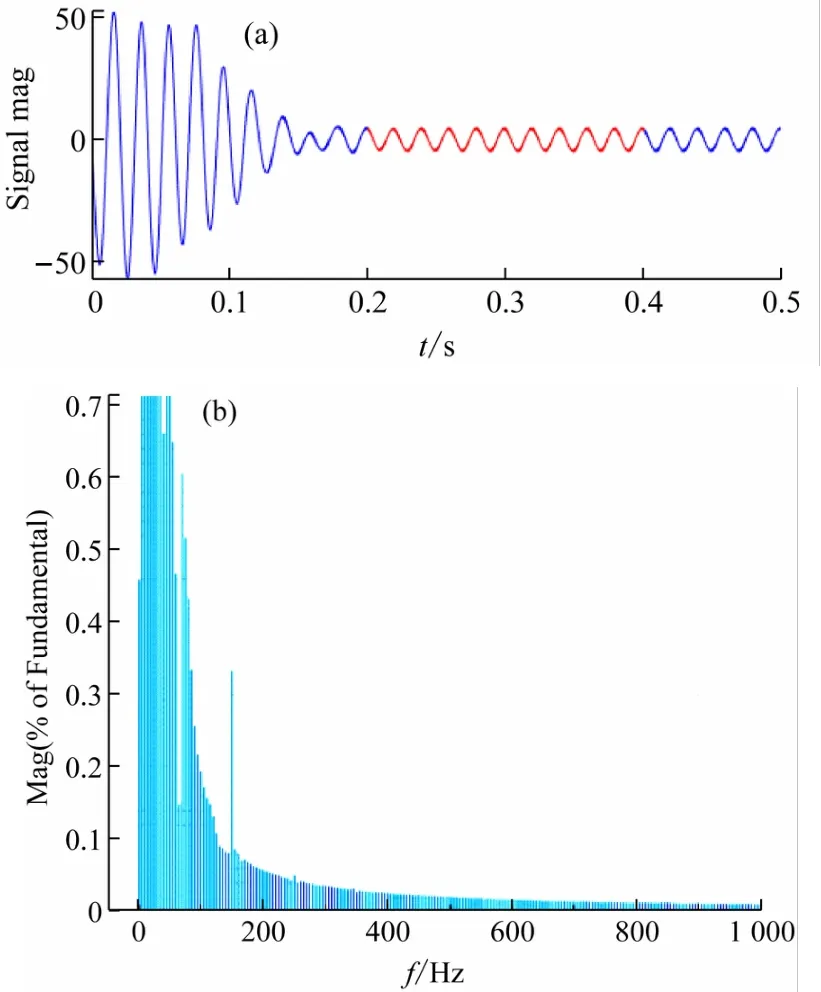
圖9 定子電流及其諧波分析
為驗證該電路結構是否具有變頻調速功能,只需改變調制波的頻率便可達到調節電動機轉速的目的,仿真通過V/ F控制將調制波的頻率在0、1、2.5 s分別設定為50、30、40 Hz。電動機在不同頻率下的轉速、轉矩及定子電流如圖10 所示,可見電動機是可以實現正常的變頻調速。
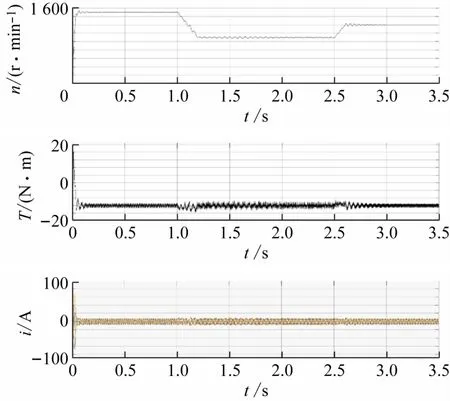
圖10 在不同頻率下電動機的轉速、轉矩及定子電流
5 結 語
本文提出了一種三相電動機的兩相交直交變頻電路結構,相對于傳統的交直交變頻器減少了1 / 3 的元器件,通過對整流側和逆變側輸入、輸出電壓的分析,采取雙極性SPWM技術進行控制,搭建了仿真模型進行仿真。仿真結果表明,三相電動機在負載運行時,兩相交直交變頻結構可以實現電動機的變頻調速,后續工作將深入研究其他調制方法對該電路結構的控制。
