復(fù)雜地形的動(dòng)車組正點(diǎn)、節(jié)能優(yōu)化
2020-11-20 23:41:04龍真真劉鴻恩王銳東
裝備維修技術(shù) 2020年6期
關(guān)鍵詞:節(jié)能
龍真真 劉鴻恩 王銳東
摘 ?要:實(shí)現(xiàn)鐵路的高安全性、高正點(diǎn)率以及節(jié)能環(huán)保是鐵路部門一直致力追求的目標(biāo),而川藏鐵路線路地形復(fù)雜、運(yùn)行環(huán)境多變,要想同時(shí)滿足安全、正點(diǎn)、節(jié)能的要求,是擺在科研工作者面前的重大難題。本文依據(jù)動(dòng)車組在復(fù)雜環(huán)境下的外部條件特征,通過實(shí)時(shí)獲取動(dòng)車組運(yùn)行限速、速度、位置等數(shù)據(jù),對(duì)動(dòng)車組正點(diǎn)、節(jié)能進(jìn)行實(shí)時(shí)優(yōu)化。同時(shí)通過某型號(hào)高速動(dòng)車組運(yùn)行過程仿真實(shí)驗(yàn),驗(yàn)證該優(yōu)化方法的有效性。
關(guān)鍵詞: 動(dòng)車組;復(fù)雜地形;優(yōu)化控制;正點(diǎn);節(jié)能
1. 引言
針對(duì)鐵路的正點(diǎn)、節(jié)能,國(guó)內(nèi)外都有很多研究,但大多是在單一的環(huán)境條件,以及單目標(biāo)的研究,對(duì)于像川藏鐵路這種復(fù)雜環(huán)境條件下的安全、正點(diǎn)、節(jié)能的在線實(shí)時(shí)研究卻很少,本文先通過對(duì)線路特征進(jìn)行分析,在其基礎(chǔ)上,再進(jìn)行安全、正點(diǎn)、節(jié)能的在線分析與研究,通過實(shí)時(shí)獲取列車運(yùn)行速度、位置、臨時(shí)限速等信息,同時(shí)對(duì)動(dòng)車組運(yùn)行過程、線路特征進(jìn)行分析,完成對(duì)動(dòng)車組運(yùn)行安全、正點(diǎn)、能源消耗的指標(biāo)分析與研究,實(shí)現(xiàn)正點(diǎn),節(jié)能的優(yōu)化[1]。
2.復(fù)雜地形動(dòng)車組運(yùn)行分析
川藏鐵路地形復(fù)雜、山多,列車穿越如同一輛巨大的過山車,而動(dòng)車組的運(yùn)行情況很大程度受實(shí)際運(yùn)行線路的影響,因此,建立準(zhǔn)確的線路模型,是實(shí)現(xiàn)高速列車正點(diǎn)、節(jié)能優(yōu)化控制的基礎(chǔ)。
本文建立的線路特征模型主要考慮了川藏鐵路實(shí)際的線路特性以及牽引供電。線路特性充分考慮了川藏鐵路線路縱斷面、曲線、橋隧;牽引供電主要考慮電氣化鐵道牽引供電區(qū)之間的分相區(qū),且惰行通過分相區(qū)的線路特征表達(dá)式如下:
5.仿真及結(jié)果分析
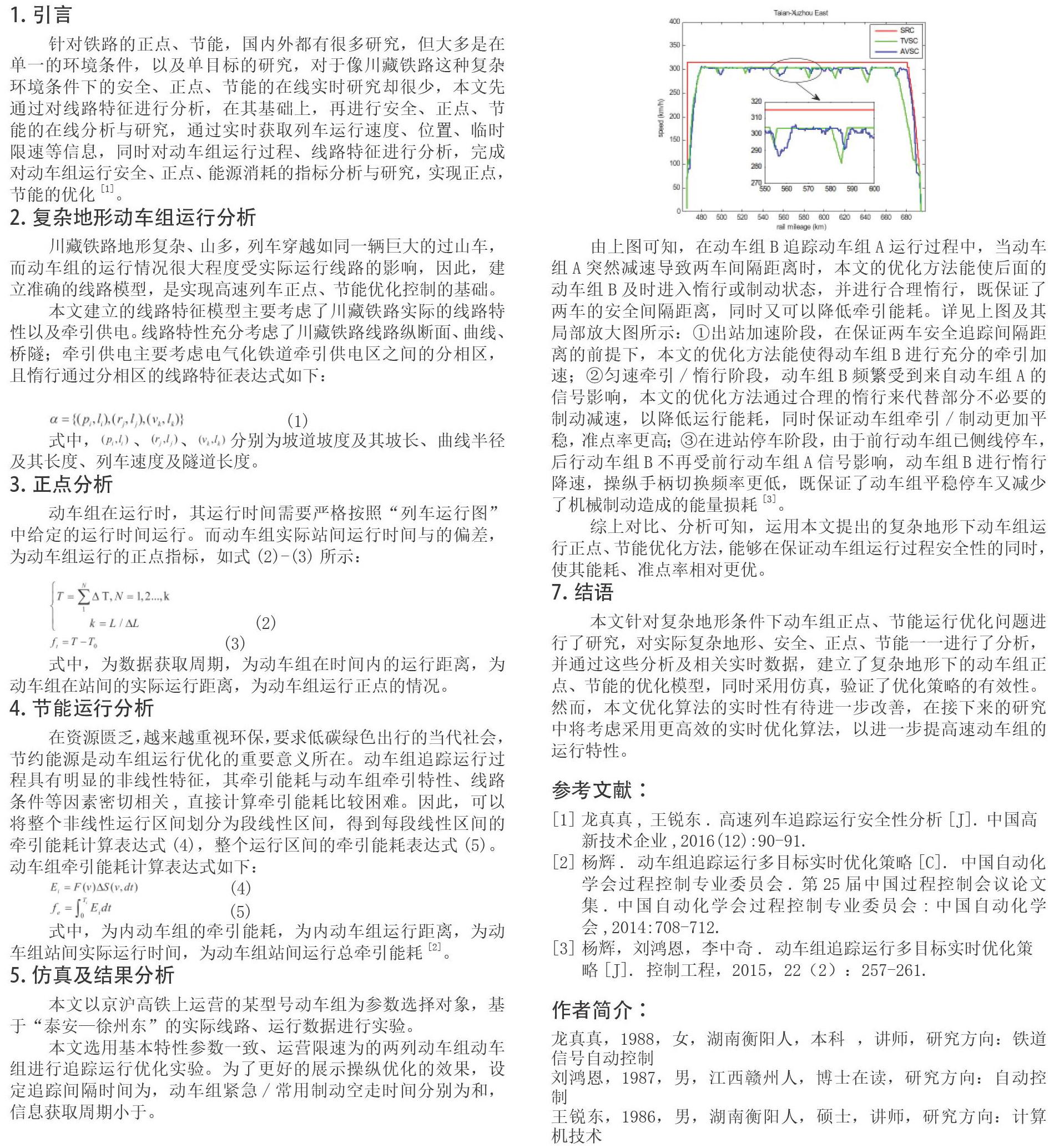
本文以京滬高鐵上運(yùn)營(yíng)的某型號(hào)動(dòng)車組為參數(shù)選擇對(duì)象,基于“泰安—徐州東”的實(shí)際線路、運(yùn)行數(shù)據(jù)進(jìn)行實(shí)驗(yàn)。
本文選用基本特性參數(shù)一致、運(yùn)營(yíng)限速為 的兩列動(dòng)車組動(dòng)車組進(jìn)行追蹤運(yùn)行優(yōu)化實(shí)驗(yàn)。為了更好的展示操縱優(yōu)化的效果,設(shè)定追蹤間隔時(shí)間為 ,動(dòng)車組緊急/常用制動(dòng)空走時(shí)間分別為 和 ,信息獲取周期小于 。
由上圖可知,在動(dòng)車組B追蹤動(dòng)車組A運(yùn)行過程中,當(dāng)動(dòng)車組A突然減速導(dǎo)致兩車間隔距離 時(shí),本文的優(yōu)化方法能使后面的動(dòng)車組B及時(shí)進(jìn)入惰行或制動(dòng)狀態(tài),并進(jìn)行合理惰行,既保證了兩車的安全間隔距離,同時(shí)又可以降低牽引能耗。詳見上圖及其局部放大圖所示:①出站加速階段,在保證兩車安全追蹤間隔距離的前提下,本文的優(yōu)化方法能使得動(dòng)車組B進(jìn)行充分的牽引加速;②勻速牽引/惰行階段,動(dòng)車組B頻繁受到來自動(dòng)車組A的信號(hào)影響,本文的優(yōu)化方法通過合理的惰行來代替部分不必要的制動(dòng)減速,以降低運(yùn)行能耗,同時(shí)保證動(dòng)車組牽引/制動(dòng)更加平穩(wěn),準(zhǔn)點(diǎn)率更高;③在進(jìn)站停車階段,由于前行動(dòng)車組已側(cè)線停車,后行動(dòng)車組B不再受前行動(dòng)車組A信號(hào)影響,動(dòng)車組B進(jìn)行惰行降速,操縱手柄切換頻率更低,既保證了動(dòng)車組平穩(wěn)停車又減少了機(jī)械制動(dòng)造成的能量損耗[3]。
綜上對(duì)比、分析可知,運(yùn)用本文提出的復(fù)雜地形下動(dòng)車組運(yùn)行正點(diǎn)、節(jié)能優(yōu)化方法,能夠在保證動(dòng)車組運(yùn)行過程安全性的同時(shí),使其能耗、準(zhǔn)點(diǎn)率相對(duì)更優(yōu)。
7. 結(jié) ? ?語
本文針對(duì)復(fù)雜地形條件下動(dòng)車組正點(diǎn)、節(jié)能運(yùn)行優(yōu)化問題進(jìn)行了研究,對(duì)實(shí)際復(fù)雜地形、安全、正點(diǎn)、節(jié)能一一進(jìn)行了分析,并通過這些分析及相關(guān)實(shí)時(shí)數(shù)據(jù),建立了復(fù)雜地形下的動(dòng)車組正點(diǎn)、節(jié)能的優(yōu)化模型,同時(shí)采用仿真,驗(yàn)證了優(yōu)化策略的有效性。然而,本文優(yōu)化算法的實(shí)時(shí)性有待進(jìn)一步改善,在接下來的研究中將考慮采用更高效的實(shí)時(shí)優(yōu)化算法,以進(jìn)一步提高速動(dòng)車組的運(yùn)行特性。
參考文獻(xiàn)
[1]龍真真,王銳東.高速列車追蹤運(yùn)行安全性分析[J].中國(guó)高新技術(shù)企業(yè),2016(12):90-91.
[2]楊輝. 動(dòng)車組追蹤運(yùn)行多目標(biāo)實(shí)時(shí)優(yōu)化策略[C]. 中國(guó)自動(dòng)化學(xué)會(huì)過程控制專業(yè)委員會(huì).第25屆中國(guó)過程控制會(huì)議論文集.中國(guó)自動(dòng)化學(xué)會(huì)過程控制專業(yè)委員會(huì):中國(guó)自動(dòng)化學(xué)會(huì),2014:708-712.
[3]楊輝,劉鴻恩,李中奇. 動(dòng)車組追蹤運(yùn)行多目標(biāo)實(shí)時(shí)優(yōu)化策略[J]. 控制工程,2015,22(2):257-261.
作者簡(jiǎn)介:
龍真真,1988,女,湖南衡陽人,本科 ,講師,研究方向:鐵道信號(hào)自動(dòng)控制
劉鴻恩,1987,男,江西贛州人,博士在讀,研究方向:自動(dòng)控制
王銳東,1986,男,湖南衡陽人,碩士,講師,研究方向:計(jì)算機(jī)技術(shù)
猜你喜歡
中國(guó)科技博覽(2016年22期)2016-11-01 15:34:51
中國(guó)科技博覽(2016年22期)2016-11-01 14:48:58
時(shí)代金融(2016年23期)2016-10-31 13:17:24
中國(guó)科技博覽(2016年19期)2016-10-19 13:10:22
中國(guó)科技博覽(2016年19期)2016-10-19 12:51:06
中國(guó)科技博覽(2016年18期)2016-10-19 11:23:00
中國(guó)科技博覽(2016年18期)2016-10-19 07:47:05
科學(xué)與財(cái)富(2016年28期)2016-10-14 21:10:06
科學(xué)與財(cái)富(2016年28期)2016-10-14 20:02:56
科學(xué)與財(cái)富(2016年28期)2016-10-14 01:30:30
