船舶除漆爬壁機器人永磁吸附裝置的分析
2020-11-21 03:20:42張春光楊煜兵張俊峰李上青劉佳慧劉嘉瑞
機械制造 2020年11期
□ 安 磊 □ 張春光 □ 褚 帥 □ 楊煜兵□ 張俊峰 □ 李上青 □ 劉佳慧 □ 劉嘉瑞
沈陽儀表科學研究院有限公司 沈陽 110043
1 分析背景
為了延長船舶的使用壽命,需要定期對船舶進行維修,除漆是船舶維修過程中必不可少的一個環節。國內各大修船企業普遍采用的除漆方法是人工干噴砂除漆,存在污染嚴重、高空作業危險、塵肺病危及健康、勞動強度大等弊端[1]。為了消除人工干噴砂的各種弊端,設計了船舶除漆爬壁機器人。船舶除漆爬壁機器人按照不同的行走方式可以分為履帶式、輪式、步行式,按照不同的吸附方式可以分為真空吸附式、磁吸附式、推力吸附式[2-5]。筆者分析的船舶除漆爬壁機器人采用輪式行走方案,永磁體與船舶鋼板壁面間產生磁力,使船舶除漆爬壁機器人吸附在船體表面上,通過高壓往復泵機組獲得高壓水進行除漆作業。
永磁吸附裝置是船舶除漆爬壁機器人的重要子系統,需要兼顧船舶除漆爬壁機器人的可靠吸附和靈活運動,安裝在行走部減速機安裝板下方,與船舶鋼板壁面間具有一定的氣隙。筆者對船舶除漆爬壁機器人永磁吸附裝置進行磁場分析,得出磁感應強度、磁場強度、吸附力的分布規律,以及在不同氣隙和船舶鋼板厚度下的吸附力變化規律。
2 永磁吸附裝置結構
筆者根據設計要求對船舶除漆爬壁機器人進行了初步設計,如圖1所示。
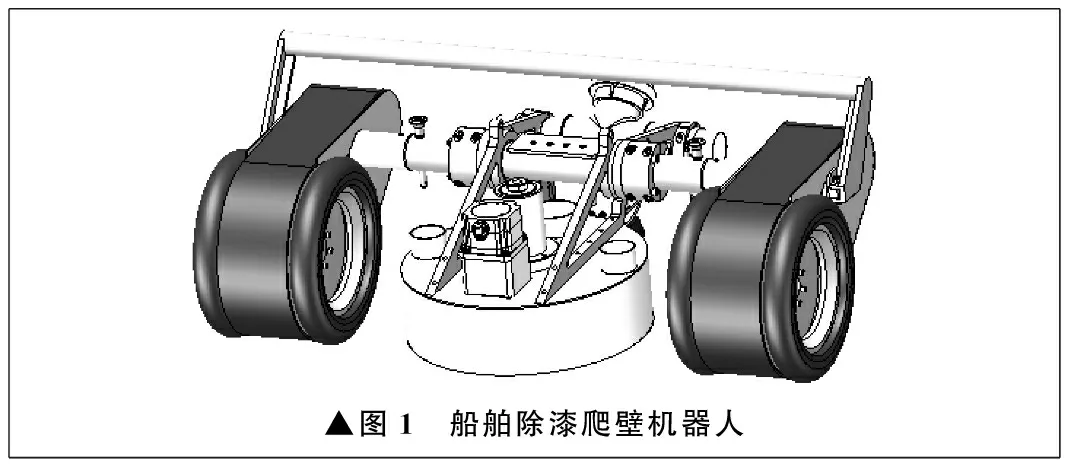
▲圖1 船舶除漆爬壁機器人
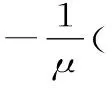
船舶除漆爬壁機器人的行走部如圖2所示。船舶除漆爬壁機器人在左右兩側各有一個行走部,每個行走部有兩個輪胎,置于行走部兩側,在兩個輪胎間有一條皮帶起防護作用。驅動系統主要包括伺服電機和減速機,安裝在兩個輪胎間。永磁吸附裝置安裝在減速機安裝板下方。
船舶除漆爬壁機器人永磁吸附裝置如圖3所示。永磁吸附裝置由永磁體、鋁合金板等組成。永磁體有五塊,通過螺釘安裝在鋁合金板上。鋁合金板通過螺釘安裝在減速機下方。永磁體與船舶鋼板壁面間有一定的氣隙,船舶除漆爬壁機器人通過永磁體與鋼板壁面的吸附力吸附于船舶表面。
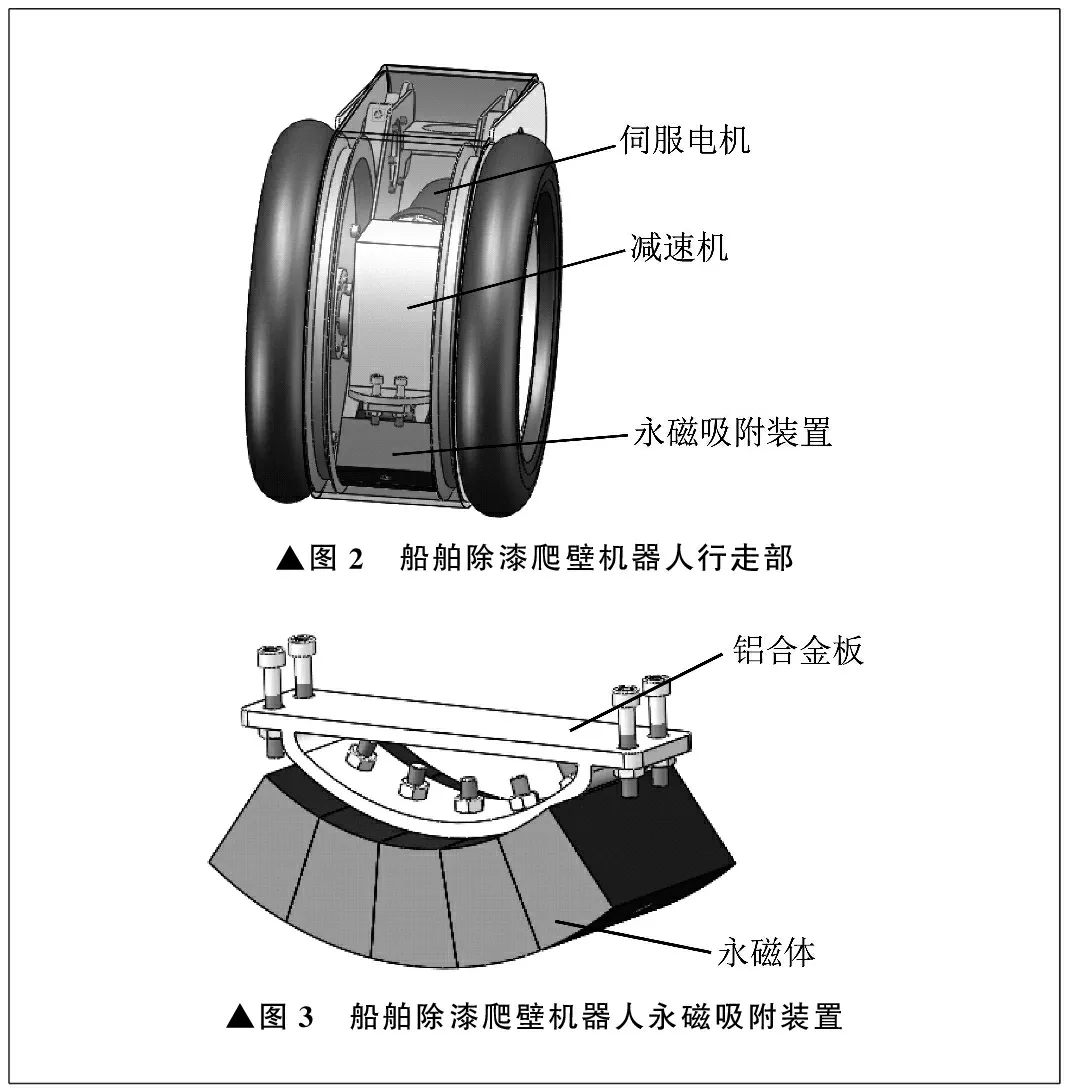
▲圖2 船舶除漆爬壁機器人行走部▲圖3 船舶除漆爬壁機器人永磁吸附裝置
3 磁場理論分析
電磁場的理論基礎是麥克斯韋方程組,永磁體產生的磁場為靜態磁場,計算同樣需要滿足電磁場基本理論。另外,在磁場理論分析中還需要引入本構方程和邊界條件[6-8]。
磁路高斯定理為:
(1)
安培環路定理為:
(2)
本構方程為:
B=μH
(3)
式中:▽為哈密頓算子;B為磁感應強度;H為磁場強度;J為電流密度;μ為介質磁導率。
引入矢量磁位A,令:
B=×A
(4)
根據庫倫規范,可知:
(5)
根據式(2)~式(5),可得:
(6)
在直角坐標系中展開,得到:
(7)
(8)
(9)
由式(4)可得:
(10)
(11)
(12)
式中:Hx、Hy、Hz依次為磁場強度在X軸、Y軸、Z軸方向上的分量;Bx、By、Bz依次為磁感應強度在X軸、Y軸、Z軸方向上的分量;Jx、Jy、Jz依次為電流密度在X軸、Y軸、Z軸方向上的分量。
根據麥克斯韋張力法,作用在磁體上的吸附力F可用張力張量T的面積分計算:
(13)
式中:S為包含永磁體的閉合面;n為面積dS的外法線方向單位矢量;μ0為空氣磁導率。
以上為永磁體磁場的理論分析方程,但是在工程實踐中較難得到問題的解析解,對此通常采用有限元法等數值解法得到數值解。
4 有限元分析
靜態磁場有限元分析有二維平面分析和三維實體分析兩種方法,三維實體分析雖然運算速度較慢,但是應用范圍廣,結果更接近真實情況,因此筆者采用三維實體分析方法。由式(13)可知,永磁體外需要一個閉合面,因此建立包含永磁吸附裝置和船舶鋼板的空氣域,空氣域的體積需要達到永磁體體積的3倍以上,如圖4所示。
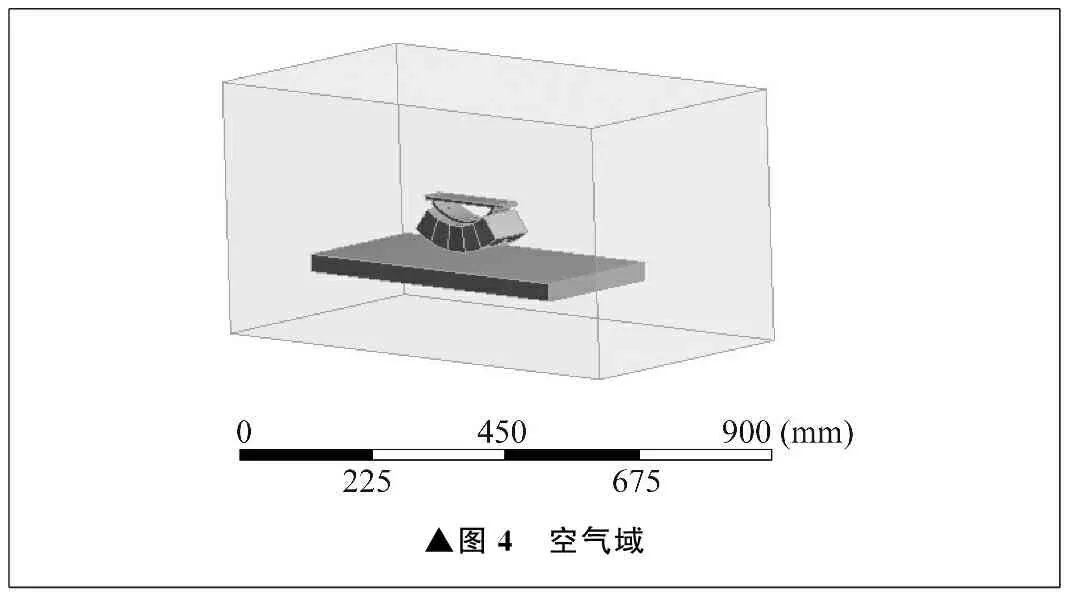
▲圖4 空氣域
永磁吸附裝置磁場有限元分析中涉及的材料主要有永磁體、鋁合金板、船舶鋼板和空氣,如圖5所示。
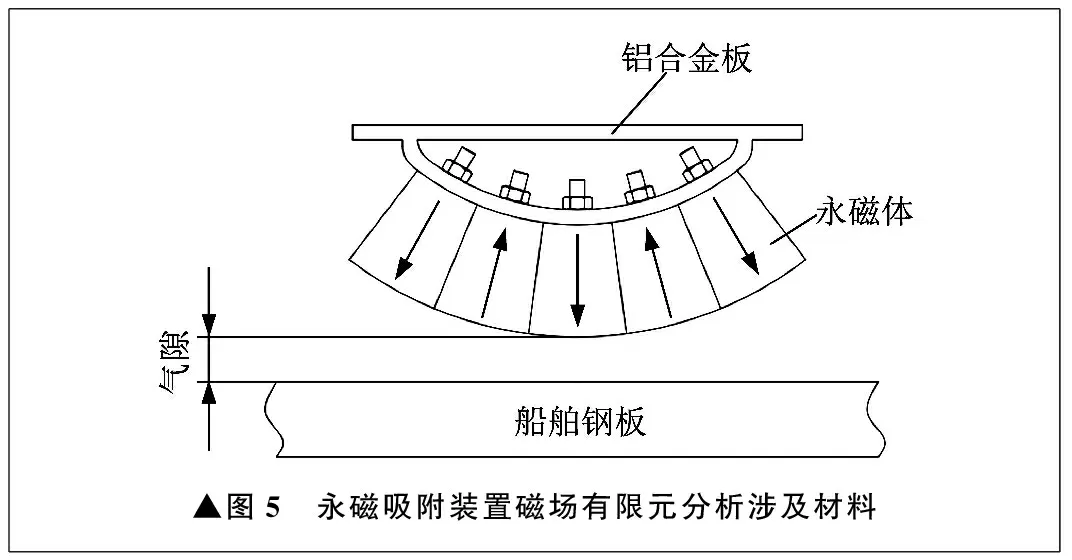
▲圖5 永磁吸附裝置磁場有限元分析涉及材料
永磁體采用N35稀土系永磁材料釹鐵硼[9],外形為扇形,內外半徑分別為105 mm和150 mm,夾角為15°,極化方向沿永磁體厚度方向,且相鄰永磁體極化方向相反。永磁體主要性能參數見表1[10]。

表1 永磁體主要性能參數
鋁合金板上除安裝永磁體外,還可以起隔磁作用。鋁合金板相對磁導率為1。船舶鋼板處于不飽和工作狀態,相對磁導率設為3 000,空氣相對磁導率設為1。
永磁體布置受到空間結構限制,因此主要對不同氣隙和不同船舶鋼板厚度下的磁場進行仿真。由于行走部中的皮帶處于永磁體和船舶鋼板之間,因此氣隙最小值在5~16 mm之間,每隔1 mm進行仿真。船舶鋼板厚度取10 mm、30 mm,對兩種船舶鋼板厚度下的磁場進行仿真。
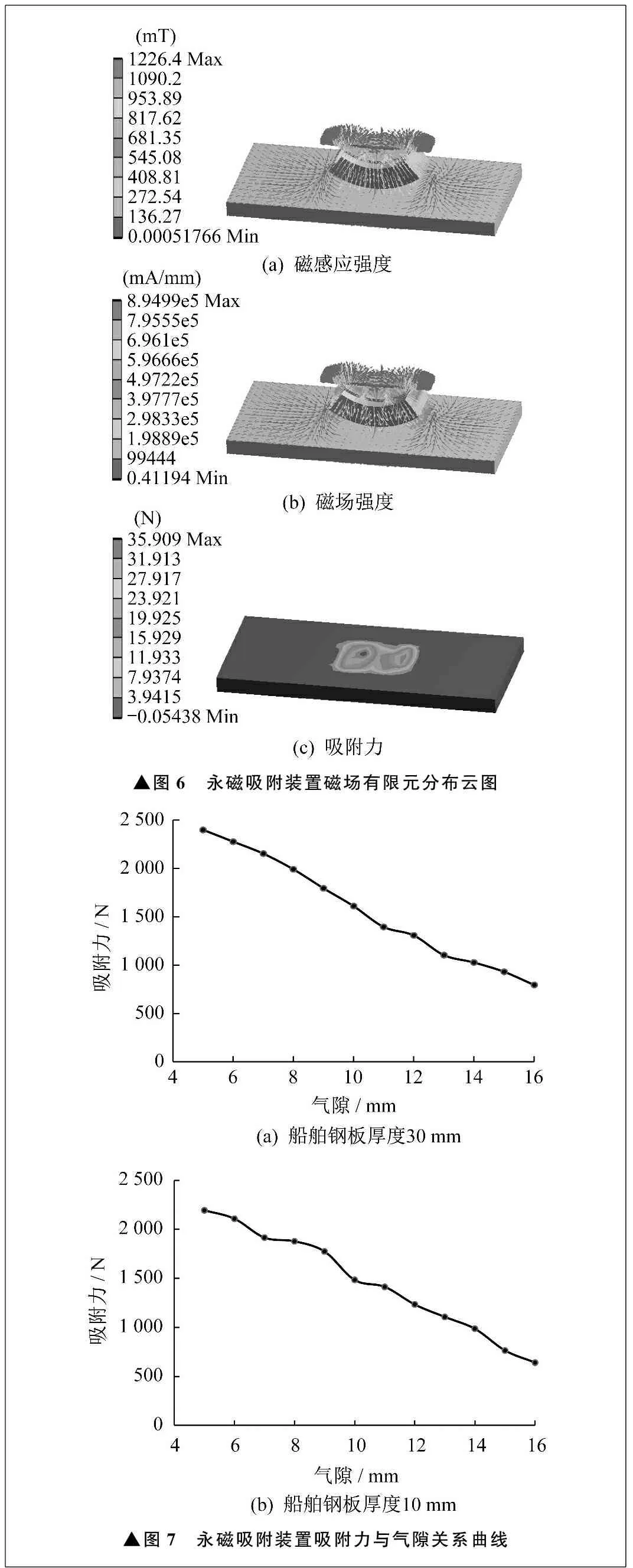
船舶鋼板厚度為30 mm,氣隙為16 mm時,永磁吸附裝置永磁體產生的磁場磁感應強度、磁場強度、吸附力分布云圖如圖6所示。由圖6可知,磁場的磁力線主要分布在瓦形永磁體的徑向方向,在寬度方向和周向方向磁力線較少,鋁合金板上方磁力線較多,但數值很小,吸附力的最大值位于永磁體和船舶鋼板間的氣隙處。
船舶鋼板厚度為30 mm和10 mm時永磁吸附裝置吸附力與氣隙關系曲線如圖7所示。由圖7可知,永磁吸附裝置吸附力隨著永磁體和船舶鋼板間氣隙的減小而單調增大。船舶鋼板厚度為30 mm時,氣隙5 mm對應吸附力為氣隙16 mm對應吸附力的3.02倍。船舶鋼板厚度為10 mm時,氣隙5 mm對應吸附力為氣隙16 mm對應吸附力的3.42倍。可見,永磁吸附裝置的吸附力受永磁體與船舶鋼板間氣隙的影響較大。當氣隙相等時,船舶鋼板厚度越大,永磁吸附裝置的吸附力越大。
▲圖6 永磁吸附裝置磁場有限元分布云圖▲圖7 永磁吸附裝置吸附力與氣隙關系曲線
相等氣隙下,船舶鋼板厚度為30 mm和10 mm時永磁吸附裝置吸附力的比值在1~1.24范圍內,可見船舶鋼板厚度雖然對永磁吸附裝置的吸附力有一定影響,但是影響相對較小。
5 結束語
筆者以船舶除漆爬壁機器人的永磁吸附裝置為研究對象,對永磁吸附裝置的磁感應強度、磁場強度、吸附力進行了有限元分析,研究了氣隙、船舶鋼板厚度等參數與吸附力的關系。研究表明,氣隙對永磁吸附裝置吸附力的影響較大,船舶鋼板厚度對吸附力雖有一定影響,但影響相對較小。仿真分析為船舶除漆爬壁機器人的理論計算提供了參考,并驗證了船舶除漆爬壁機器人設計的合理性。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
當代陜西(2022年6期)2022-04-19 12:11:54
艦船科學技術(2022年2期)2022-03-29 01:12:44
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
