
可升級的基于模糊控制的最優化交通信號燈系統
2020-11-23 12:02:12張書陽天津工業大學電子與信息工程學院陳佳琦東北石油大學地球科學學院
數碼世界 2020年11期
張書陽 天津工業大學電子與信息工程學院 陳佳琦 東北石油大學地球科學學院
1 引言
隨著城市的發展其規模在不斷擴大,交通也需要不斷的提高和改進,交通的是否順暢已經成為城市發展的一個重要因素。目前,伴隨著機動車輛的不斷增加,尤其是十字路口的交通問題頗為關鍵,嚴重的影響到城市交通安全。但是信號燈的時間并不是十分合理,經常會出現一個方向積壓了很多車流量,另一個方向卻暢通無阻。基于大數據的最優化交通問題就是來解決當前信號等待時間不均勻的問題,從而最大化實現綠色環保的。
2 理論設計計算
由于我國的交通因出行日期,時間具有車輛多少隨機性強的特點,用精確的數學模型來描述比較困難,對單個路口紅燈等候時間的優化顯得很重要。
對單個路口而言,當交通需求較小車輛比較少時,信號周期則應設置的短一些,但不少于一定秒數的綠燈時間(如果小于這個秒數車輛來不及通過路)。當交通需求很小時,經過觀察和計算為了保證車輛的最少通過時間經過按最小周期運行(20秒)。當需求較大時,只能按比較大的時間周期進行控制。這樣一個方向的車輛保證了足夠甚至更多的通行時間,但另一個方向的車輛產生了比較嚴重的車輛堵塞現象。所以設計單個紅綠燈路口的模糊控制算法變得十分必要且迫切。我將這個表達分為以下幾個步驟:第一步從第一個方向開始依次給四個方向分別指定最大綠燈時間;第二步先給一個方向的綠燈最短綠燈時間,記Δt=20秒;第三步在Δt內測得通行車道上的交通需求,設其為K;第四步若K小于某一給定的值r或累積綠燈時間,則將綠燈轉到下一方向同時返回第二步,如果不是那么繼續;第五步根據K值的大小來確定綠燈延長時間Δt。如果K比較小則少量延長綠燈時間,反之如果K比較大則多延長綠燈時間,依據K值由此建立模糊控制規則。設延長的綠燈時間為Δt,若+ΔG≥70秒,則Δt=70秒;否則該相位的綠燈時間為+ΔG,回到第三步。用車輛等候長度來表示交通需求,建立下述模糊控制規則。將測得的等候車輛長度可看作模糊變量,其論域(單位是輛)為:S={3,8,13,18,23},取5個語言值:(短(),較短(),中等),(較長),(長)。綠燈追加時間Δt及其對應語言值{10(少),20(較少),30(適中),40(較多),50(多)}。根據模糊統計法(或者神經網絡法)得出五個控制規則。由5條語言控制策略可組成單輸入單輸出語言控制策略,每條控制策略可用模糊關系矩陣表示。再求出兩者的模糊關系R(規則內取交集,規則間取并集),再進行模糊決策,其中模糊控制器的輸出為誤差向量和模糊關系的合成。
最后將模糊推理得到的模糊量進行反模糊化,變換為應用于交通信號燈中控制精確量,從而實現了對交通路口一個方向的綠燈時間的模糊控制。其中要遵頊“隸屬度度最大原則”進行反模糊化。
當然隨著通信技術的進步,芯片成本的降低,我們可以把這個模糊控制系統升級為模糊自適應PID系統。因為像今年南方比往年頻發的大量降雨引發的洪水問題,紅綠燈路口的等候規則(屬于非人為因素)就需要馬上修改。而自適應控制運用現代控制理論,使用云計算的方法通過穩定的信道傳送給交通信號燈。具體操作是利用往年暴雨條件下(也可設置其他非人為因素)操作人員的參數正定經驗存入計算機中,這樣就實現了智能(模糊自適應)PID控制器。這種控制器可以把模糊控制系統和先進的專家系統相結合,使交通信號燈在面對人為因素(如消防車,救護車經過)和非人為因素(冰雹洪水等)時,有了更加智能的應對方法。
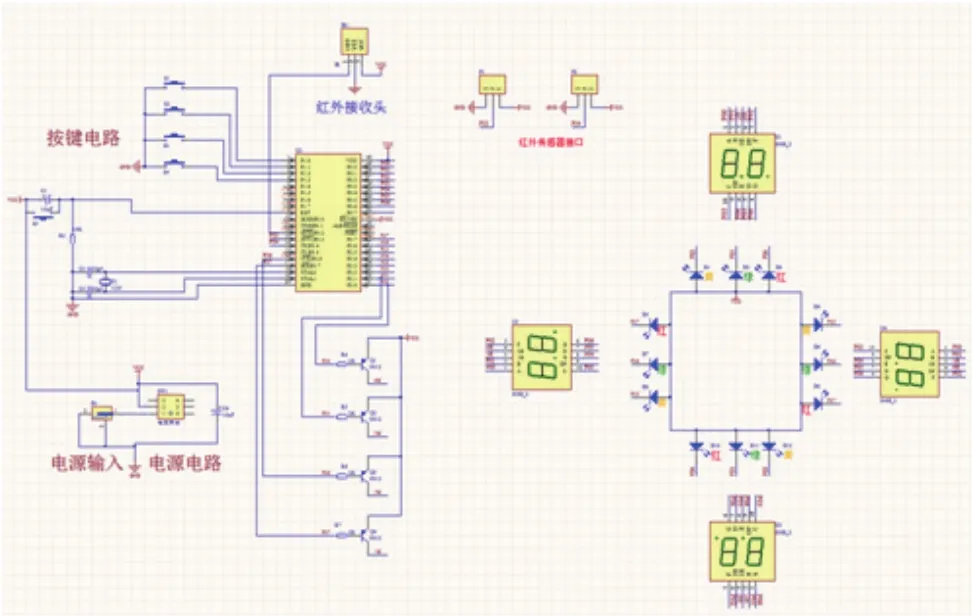
3 用單片機最小系統模擬
設計的最優化交通信號燈系統分為三部分。基礎數據采集依靠紅外線傳感器來統計上一次經過的車輛。第二部分采用STC89C51單片機以及單片機最小系統算出下一次綠燈時間同時傳送給信號燈,第三部分通過信號燈來反映實際情況。本設計的控制部分由單片機+按鍵+發光二極管+共陽數碼管+三極管設計而成。可以手動設置東西、南北的倒計時時間、可以設置黃燈閃爍時間。采用四方向數碼管設計,更加符合真實的交通信號燈設計。同時通過紅外傳感器實時監測車流量,通過在同期車流量和臨時車流量兩個因素來共同決定下一時刻的紅綠燈時間長度,減少車輛排隊等待時間,使問題得到最優化解決,最大程度減少車輛車輛等候時間。
使用紅外線探頭來測量上一次綠燈時車流量的多少,并自動調節下一次綠燈的時間。有效的緩解了車輛等候時間,避免了擁堵。夜間模式是比較簡單,使4個方向黃燈閃爍。當消防車、救護車等特殊車輛通行時按下”緊急模式鍵”全部亮紅燈,待緊急車輛通過后,再恢復后。
設計的系統默認是當南北方向綠燈時間最開始為20s,當車流量3到8之間時時間量增加10s,當車流量8到13之間時時間量再次增加10s,當車流量13到18之間時時間量再次增加10s,當車流量18到23之間時時間量再次增加10s,當車流量23以上時時間量增加到70s。車流量的增加根據模糊算法得到的參數是可以修改的。設計一個車輛數量的隸屬函數(使用的是模糊統計法)在{3,8,13,18,23}之內按大小的順序劃分為五個等級即{短,較短,中等,較長,長}。采用五個三角形隸屬度函數來表達,從而建立一個模糊系統。具體來優化綠燈時間,使增加的時間不在以10s為單位,更加優化了等候時間。
4 結束語
交通信號燈系統具有較大的隨機性和不可控制的非人為因素影響,建立一個數學模型比較困難。而模糊控制方法適用于較大隨機可能性的城市交通系統的控制。在未來科技進一步發展后還可以在原來的模糊控制基礎上升級為模糊自適應PID系統。避免了科技升級帶來的資源二次浪費。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子設計工程(2015年15期)2015-02-27 12:07:30
