含間隙天線折展機構模塊精度分析
2020-11-24 03:34:30董自瑞陳金寶劉虎林
上海航天 2020年5期
關鍵詞:模型
董自瑞,林 飛,侯 鵬,陳金寶,劉虎林
(1.上海衛星裝備研究所,上海 201109;2.南京航空航天大學 航天學院,江蘇 南京 210016;3.上海航天電子技術研究院,上海 201109)
0 引言
折展機構具有收納率大、重量輕、精度高等特點,被廣泛應用于柔性太陽能帆板、星載天線、太空望遠鏡等空間設備的支撐裝置中,其展開精度是保障系統正常運行的關鍵參數指標[1-3]。常見的折展機構主要由連桿經轉動副鉸接而成,但是由于加工誤差的存在,為保證良好的轉動性能,轉動副的孔和軸之間不可避免地留有一定間隙,使機構在運動學上表現出不確定性[4-5],直接影響著機構的展開精度。
對于轉動副間隙對機構的影響,已有大量學者進行了研究,但是其研究對象主要為單閉環機構[6-7],而折展機構一般為多環閉鏈機械系統,具有環約束相互耦合、參數關系復雜等特點[8],對其展開誤差的分析存在高非線性、強耦合等問題,單閉環的分析方法難以直接適用。目前,對于多環閉鏈機構的精度分析雖然已有學者對其進行了探索,但是研究成果不多,有待進一步完善,如文獻[9]基于最小彈性勢能法和拉格朗日乘子法,給出了桿件變形及其尺寸誤差引起的展開精度分析方法,而未考慮運動副間隙的影響。文獻[10]基于矩陣法和粒子群優化算法實現了多環閉鏈的解耦,但僅討論了含運動副間隙時的最大展開誤差。文獻[11]采用螺旋理論給出了含轉動副間隙的多環閉鏈機構精度分析的通用方法。文獻[12]通過采用冗余驅動控制使運動副間隙對機構的影響最小化,但其引入了多余的自由度和驅動,控制難度大,且改變了機構的構型。
本文通過將轉動副間隙等效成“無質量桿”建立含間隙的折展機構等效模型,根據約束關系不變原則,將多環閉鏈拆分成多個單閉環,基于D-H 法建立其幾何關系,運用蒙特卡洛法模擬加工誤差和含間隙轉動副的狀態,對其展開誤差進行分析。
1 含間隙折展機構構型
本文采用如圖1 所示的折展機構模塊化單元作為研究對象。該折展機構含6個基本單元肋組成(2 個橫向肋、2 個縱向肋和2 個縱向輔助肋),單個模塊可進行拓撲成所需要拋物柱面構型。
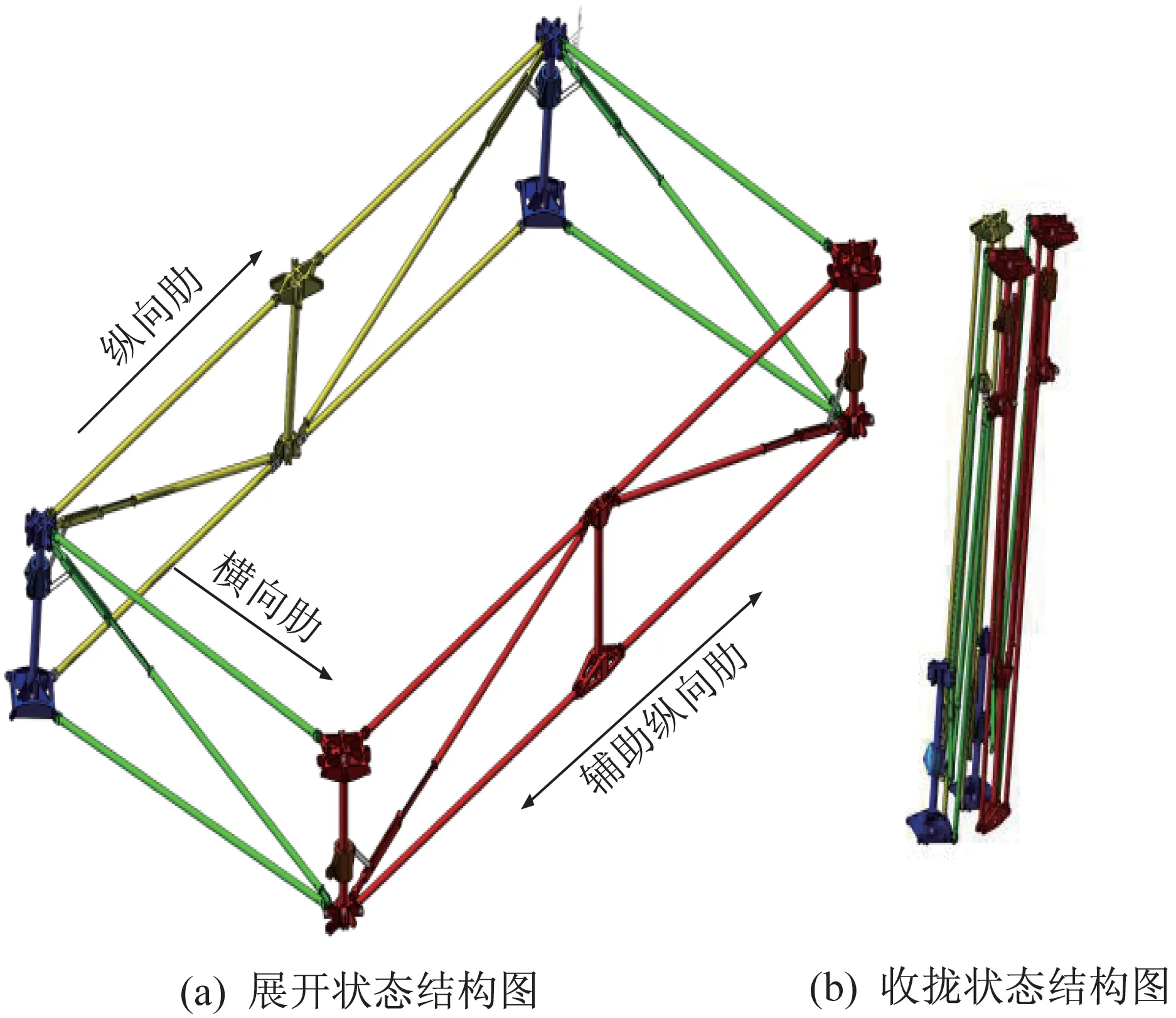
圖1 折展機構單元模塊Fig.1 Unit module of the folding mechanism
基本單元是實現整個天線支撐機構折展功能、保障展開精度的基礎,其折展原理如圖2 所示。該機構由彈簧力推動滑塊A 沿y軸正方向運動,進而帶動各連桿運動使機構逐步展開,直到連桿DE觸碰到機械限位點H,機構停止運動。此時,連桿DE與連桿QD共線,機構展開到位且處于自鎖狀態,拉索張緊提供張力。圖中,M1點和M2點為天線金屬網的固定位置,展開狀態下,這兩點的位置精度直接決定著天線的型面精度。
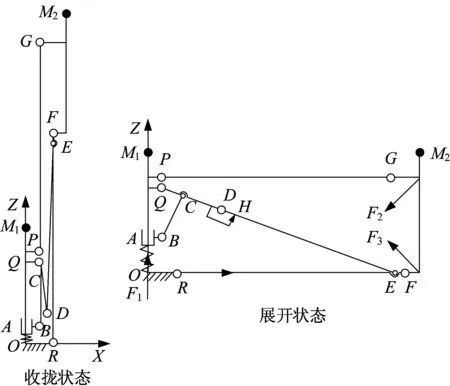
圖2 折展機構基本肋單元Fig.2 Basic rib element of the folding mechanism
折展機構單元肋基本單元包含1 個滑動副和9 個轉動副,自由度為1。由于運動需求及制造誤差的存在,各運動副均存在間隙,使機構的運動存在一定的不確定性。為提高運動可靠性,滑塊處為直線軸承與軸精密配合,間隙極小,可忽略該處間隙,因此,簡化后的模型僅存在轉動副。
2 含間隙轉動副等效模型
折展機構肋基本單元展開到位后其位姿確定,即各連桿處于受力平衡狀態,各轉動副符合接觸假設,即孔和軸始終保持接觸。因機構運動過程受力和沖擊較小,各構件剛度大,可視為多剛體系統,故采用“無質量桿”等效模型[12]描述間隙轉動副,如圖3 所示。將孔和軸的偏心距等效成長度為ri的“無質量桿”,其兩端分別與孔和軸的中心鉸接。
ri由孔和軸的配合公差確定,是服從正態分布的隨機變量。根據3σ準則,認為ri的取值幾乎全部集中在(μ-3σ,μ+3σ)區間內,則ri的均值μi和標準差σi確定如下:
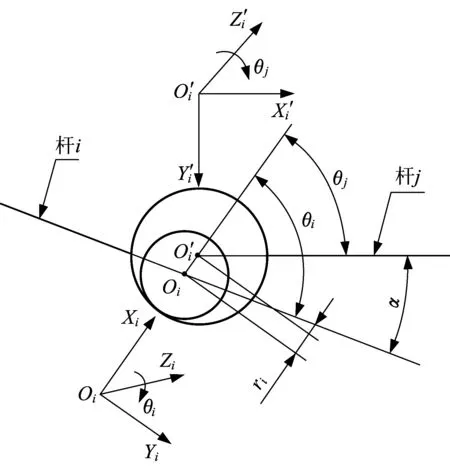
圖3 轉動副間隙等效模型Fig.3 Equivalent model of the rotating pair clearance
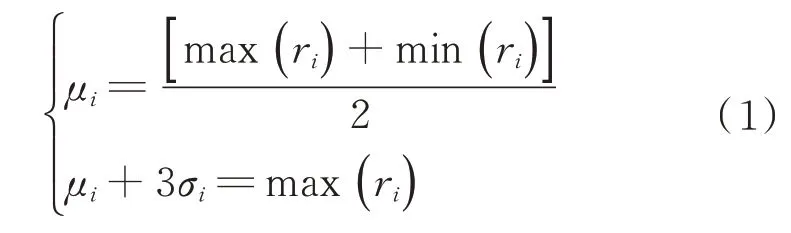
式中:max(ri)、min(ri)分別為孔和軸之間的最大間隙和最小間隙。
根據D-H 法建立相應的坐標系,確定各桿件方位角θi、θj的正方向。其中,θi為“無質量桿”OiOi'相對于連桿i的方位角,θj為連桿j相對于“無質量桿”OiOi'的方位角,且滿足

式中:α為含間隙轉動副連接的連桿j相對于連桿i的方位角。
3 自由狀態下的展開誤差模型
當不考慮拉索張力、彈簧力等作用力對機構中各間隙轉動副的孔和軸的相對位姿的影響時,即“無質量桿”處于自由狀態,其方位角θi在[-π,π)內服從均勻隨機分布,且任一時刻θi為定值,則根據“無質量桿”等效模型構建的含轉動副間隙的折展機構等效模型如圖4 所示。由于“無質量桿”固定不動,因此,折展機構自由度仍為1。受D點處的轉動副間隙影響,折展機構展開到位后,連桿DE相對連桿Q'D偏轉了角度β,如圖5 所示。
根據正弦定理,有

圖4 自由狀態下含間隙的折展機構等效模型Fig.4 Equivalent model of the folding mechanism with clearance in free state
圖5 轉動副D 處的間隙等效模型Fig.5 Clearance equivalent model atD of the rotating pair
由式(3)解得

根據D-H 法的定義有

式中:θD為連桿DD'相對于連桿Q'D的方位角;θD'為連桿D'H相對于連桿DD'的方位角;rD為鉸接點D處孔和軸的偏心距;lDH為DH的距離。
為便于分析計算,根據約束不變原則,將圖4 所示的折展機構等效模型拆分成Ⅰ、Ⅱ、Ⅲ3 個單閉環進行分析,如圖6 所示。

圖6 拆分后的單閉環結構Fig.6 Single closed-loop structures after split
令

jTi表示坐標系oj-xjyjzj到坐標系oi-xiyizi的齊次變換矩陣。根據D-H 法分別在閉環Ⅰ、Ⅱ、Ⅲ內各轉動副上建立動坐標系oi-xiyizi,則兩坐標系之間的齊次變換通式為
其中,
式中:lj為oj沿xj到oi的測量距離;ωj為zj沿xj到zi的旋轉角度;di為xj沿zi到xi的測量距離;θi為xj沿zi到xi的旋轉角度。
因此,折展機構上各點在固定參考坐標系o-xyz內有如下關系:
閉環Ⅰ

閉環Ⅱ

閉環Ⅲ

由于機構為封閉環,滑動副A無間隙,因此,需滿足如下約束條件:
此外,由于轉動副間隙導致了含間隙轉動副連接的連桿j相對于連桿i的方位角相對理論值α0偏轉了αr,因此,式(2)可寫為

式中:α0為定值;αr為一定范圍內的均勻隨機變量,其范圍由轉動副間隙大小確定,取值較小。
則自由狀態下間隙引起的展開誤差為

式中:[xi,yi,zi]T為點i相對固定參考系o-xyz的理論坐標值。
4 展開誤差求解
4.1 幾何參數
根據選定的軸孔配合公差,折展機構各轉動副間隙值ri的取值范圍為0.01~0.04 mm,轉動副相對固定參考系o-xyz的理論坐標值見表1。
4.2 自由狀態下展開誤差求解
各鉸接點的間隙量為0.01~0.04 mm,采用蒙特卡洛法模擬各轉動副間隙及各桿件方位角的取值,大量獲取滿足約束的折展機構展開位形(104種),求解相應的展開誤差δf,計算結果如圖7~圖9 所示。

表1 轉動副理論坐標位置Tab.1 Theoretical coordinates of the rotating pairs
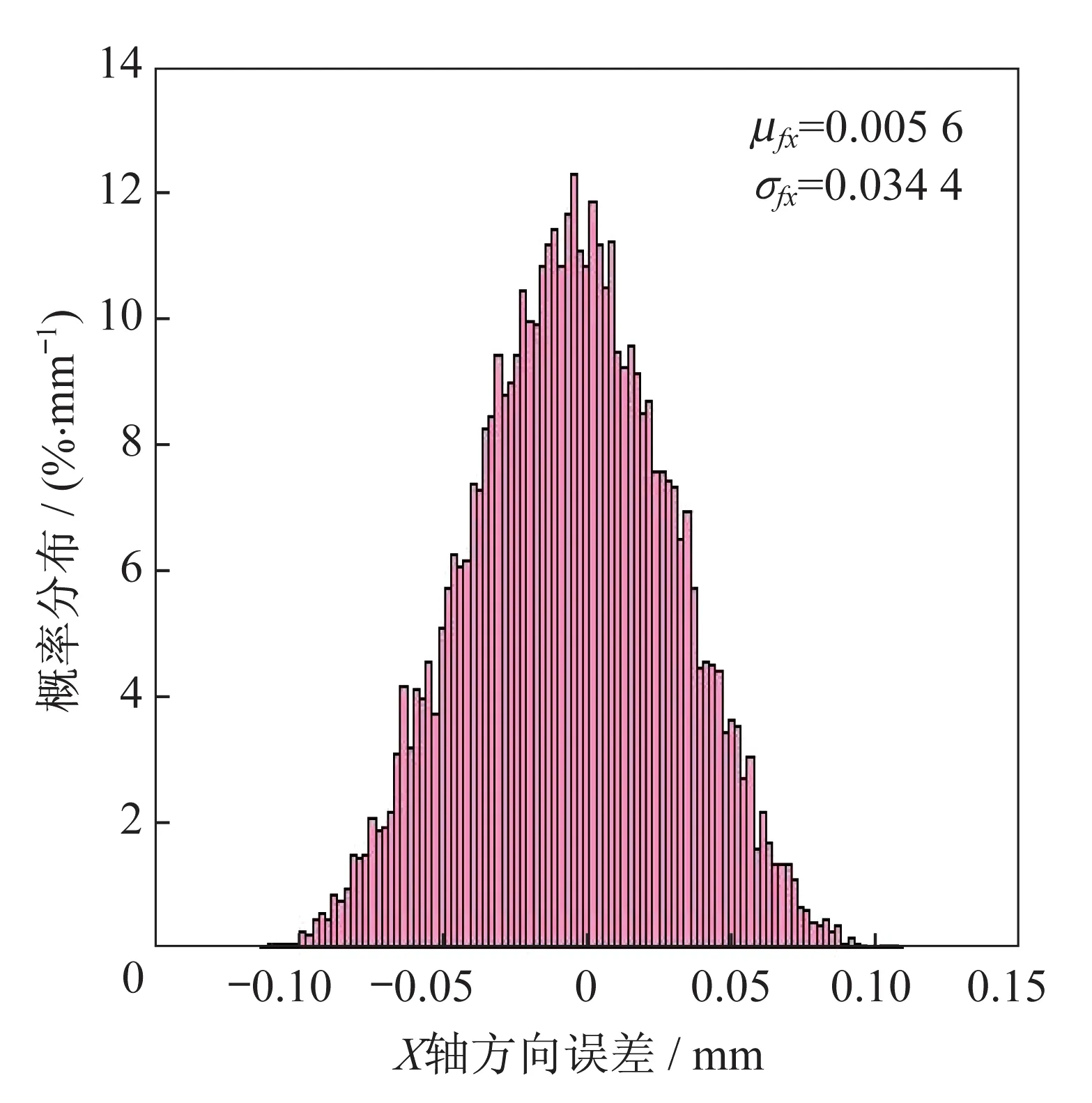
圖7 X 軸方向上的展開誤差分布Fig.7 Unfolding error distribution in theX-direction
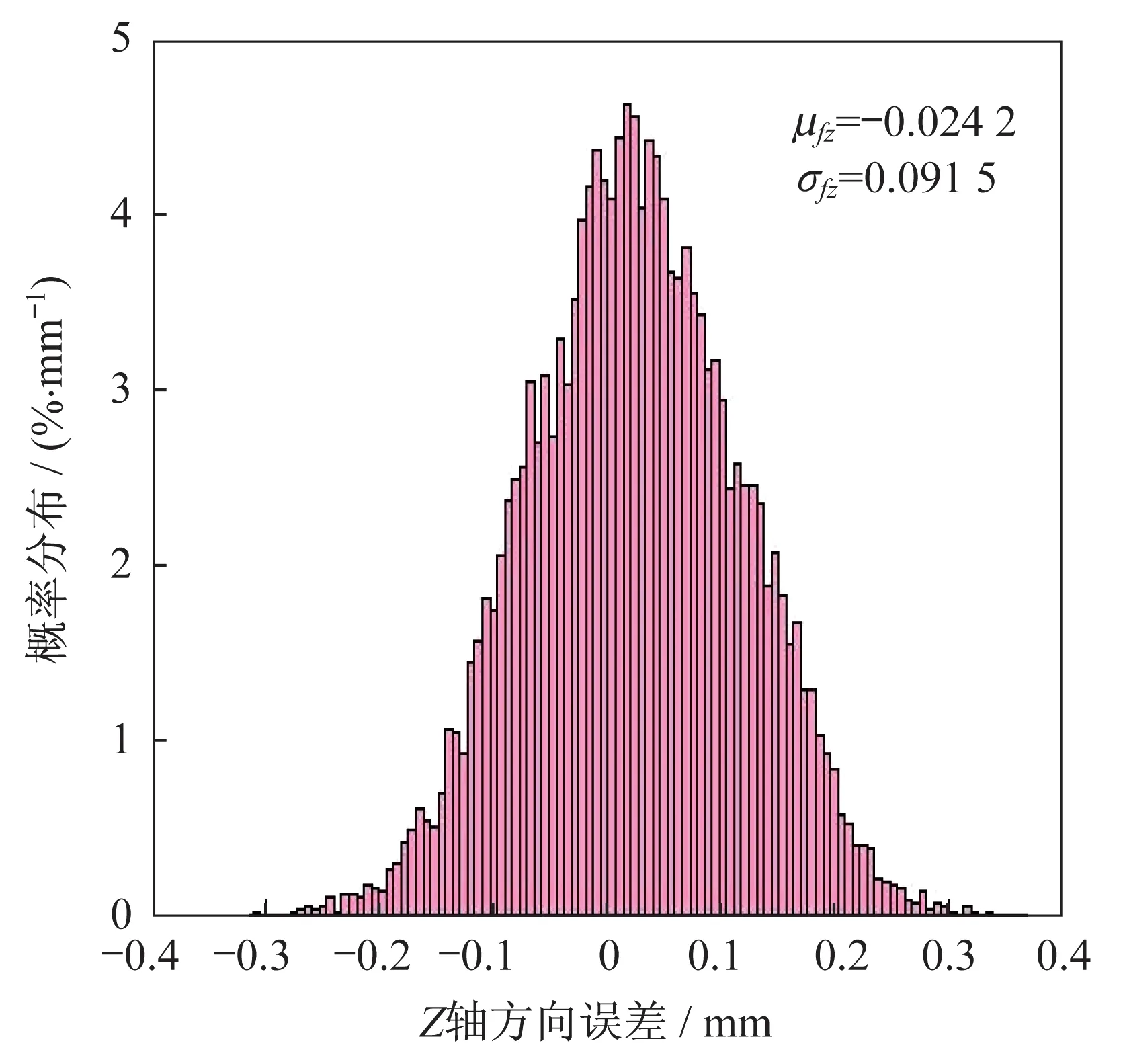
圖8 Z 軸方向上的展開誤差分布Fig.8 Unfolding error distribution in theZ-direction
如圖7所示,在Z方向誤差均值為μfx=-0.005 6 mm,標準差為σfx=0.034 4 mm,誤差最大值為δfx=0.111 1 mm。如圖8 所示,在Z方向誤差均值為μfz=0.024 2 mm,標準差為σfz=0.091 5 mm,誤差最大值為δfz=0.339 3 mm。由此可見,轉動副間隙對該展開機構在Z方向上的展開精度影響較大。如圖9所示,網面支撐點M2綜合誤差(實際位置點與理論位置點的距離)的均值和標準差分別為μfl=0.083 3 mm、σfl=0.056 8 mm,最大誤差為δfl=0.353 7 mm。
當不考慮受力時最大誤差為0.353 7 mm,誤差均值為0.083 3 mm,由于天線在單方向上由2 個相同的單元組成,因此,天線整體誤差可近似為多個單元誤差的簡單疊加,即整體最大誤差值為0.707 4 mm,說明了整體天線折展機構精度在有效范圍內誤差很低。
5 結束語
本文利用“無質量桿”模型建立了自由狀態下含間隙折展機構的等效模型,根據約束關系不變原則,對該模型進行了分解;基于D-H 法建立了各單閉環模型之間的幾何關系,實現了多環閉鏈機構的解耦;運用蒙特卡洛法模擬加工誤差和含間隙轉動副的狀態,對其自由狀態的展開誤差進行了求解分析。經過計算分析可知,轉動副間隙對折展機構單元肋展開在Z方向上的展開精度影響較大,單元肋展開最大誤差為0.353 7 mm,折展機構模塊整體誤差最大值為0.707 4 mm,為拋物柱面天線設計精度提供了參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
