沐浴機器人的結構設計
2020-11-24 06:48:36楊徐朱家誠魏俊杰謝佳奇
機械工程師 2020年11期
楊徐,朱家誠,魏俊杰,謝佳奇
(合肥工業大學機械工程學院,合肥230009)
0 引 言
隨著時代的發展進步和人口老齡化社會的逐漸到來,服務機器人也逐漸應用于養老醫療行業[1],智能服務機器人被列為2006—2020年大力發展的前沿技術[2]。根據歷次的人口普查資料,從1964—2018年我國的65周歲及以上人口占比一直在上升,到2018年已經達到了11.9%;而使用家庭服務機器人照護老人,可以極大地緩解青年人的養老壓力,使他們可以專心工作[3],與此同時促進了養老服務機器人行業的發展。國外沐浴機器人技術的研究較早,從只有局部清潔功能的簡單沐浴機器到功能復雜的全自動沐浴機器人,已經建立起從低端產品到高端產品的系列,但是大部分都只是實驗室試制產品。盡管國內對沐浴機器人的研究起步較晚,但是與國外先進技術的差距已經越來越小。各個高校研究所和企業根據沐浴機器人的市場需求,研發出各具特色的沐浴機器人,除了普遍具備的自動淋浴功能之外,還擁有部分獨特功能,如水溫智能調節功能,體型智能適應功能,自動烘干功能等。沐浴作為一項重要的生活需求,國內外相關的輔助沐浴機器產品大部分功能都比較單一,而且大部分只適合中青年使用,不適合老弱人群使用。故研發一款適合老弱人群的主動式多功能輔助沐浴的機器人具有很廣闊的市場前景,不僅可以緩解家庭的養老壓力,而且可以大大地提升老弱人群的生活質量。
1 沐浴機器人助手的系統組成
1.1 功能需求
通過分析老弱人群的身體情況結合沐浴場景,可得出沐浴機器人助手的用戶需求:沐浴功能完備,可以輔助老弱人群淋浴、洗頭、搓背、按摩、擦干自身等;操作簡單容易,人機交互好,有語音操作和提示等功能;智能自適應各種體型的人,沐浴程序可以容易地更改以適應特殊人群;安全性高,擁有輔助站/坐、坐姿維持、異常檢測和溫度保護等安全功能;符合人機工程學原理,用戶體驗好。
1.2 整體方案設計
沐浴機器人助手的總體方案設計采用的是模塊化設計理念,如圖1所示,包含主機架、頭部清潔模塊、背部清潔模塊、姿態扶助模塊、淋浴模塊、烘干模塊和控制系統。主機架的功能是搭載各個模塊,合理地為各個模塊分配空間;為檢測元件和執行機構提供坐標參考。頭部清潔模塊的功能是代替人手進行自動洗頭動作,清潔按摩人的頭部和后頸部。背部清潔模塊的功能是利用激光位移傳感器和工業相機定位,笛卡爾坐標機械手清潔人體背部主要區域。淋浴模塊利用溫暖的噴淋水流對人的整個身體進行清潔,配合頭部清潔模塊和背部清潔模塊,并對其清潔不到的區域進行補充性清潔。姿態扶助模塊在用戶出入浴時(坐下/站立)進行扶助,沐浴時提供支撐保護。烘干模塊使用溫和的干燥熱風自上而下對人體進行風干。電氣控制柜主要裝有工控機(主站)、PLC(從站)和觸摸屏,用于控制頭部清潔模塊、背部清潔模塊和姿態扶助模塊的移動控制、定位控制、各個模塊執行機構動作控制、各個動作的時序控制,進而實現對整個動作流程的邏輯控制。
2 沐浴機器人主要機械結構設計
2.1 頭部清潔模塊的設計
頭部清潔模塊結構方案采用半環臂按摩清潔機械手結構。為了對頭部進行全面的清潔,根據人體頭部近似橢球體的形狀特點,本文將頭部分為兩個區域,頭頂部區域為近似球體的一部分,后頸部為剩下的曲面區域。頭頂部采用半環臂結構清潔,后頸部采用獨立總成清潔,如圖2所示。
半環臂結構末端按摩清潔機械手可分為機架載體、手指部件、驅動裝置、防水裝置4部分。其中,機架載體由機架和相應的機械部件組成,連接中間連接臂,承載手指部件是其它部分的安裝基礎。手指部件仿照人手抓捏頭發時的形態設計,其主要功能是對人體頭部進行搓洗。驅動裝置為手指部件提供動力;防水裝置對末端按摩清潔機械手和人體提供防護,防止因設備漏水造成的危險。
為了增強清潔機械手的通用性,模擬人手抓捏頭發,設計了三自由度的按摩機械手指結構。末端觸頭采用可拆卸設計,材料為食品級橡膠,輕柔舒適無刺激,可以隨著伸縮旋轉桿旋轉和移動;單個手指為圓柱凸輪與彈簧串聯設計,使得末端觸頭受到來自人體頭部的壓力時,可以自動收縮并且進行旋轉,對頭發進行清洗;每對手指可以聯動旋轉,進行抓捏的洗頭動作,且極大地增強了末端按摩清潔機械手的自適應性,如圖3所示。
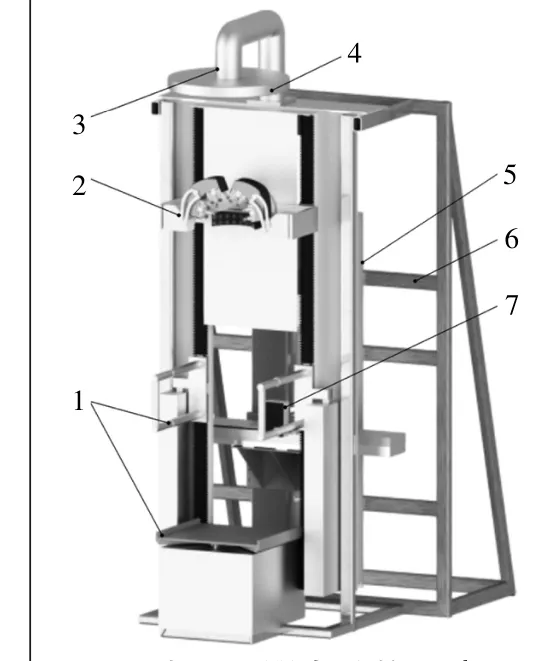
圖1 沐浴機器人結構示意圖
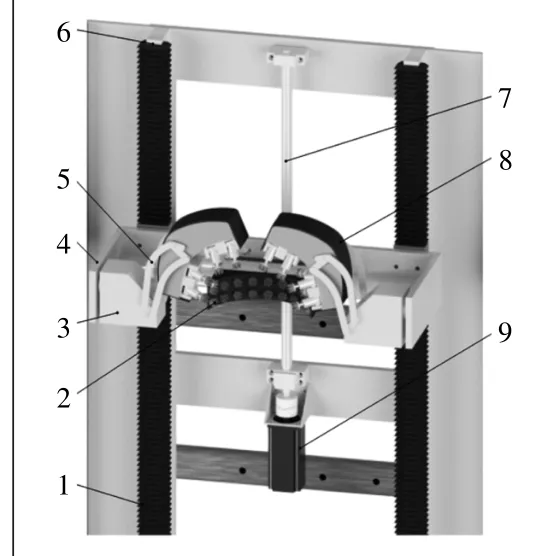
圖2 頭部清潔模塊示意圖
中間連接臂需要維持末端執行結構貼在頭部的狀態,本文提出了如圖4所示的結構。該種結構是用連桿機構代替中間旋轉臂,使得驅動電動機可以布置在前端而不是末端執行器上,避免了結構上的“頭重腳輕”。通過連桿的軌跡設計連桿機構,連桿BC上的E點連接末端清潔機構。根據國家標準相關數據資料,選取了末端清潔機構連接點E的一種軌跡上的8個離散點。l1、l2、l3、l4、l5、β、γ、θ0的幾何意義如圖4所示,θ0是桿AB與桿AD的初始夾角。連桿BC上E點的運動軌跡由l1、l2、l3、l4、l5、β、γ、θ0和A(0,0)決定,由于A位于坐標原點,故只有8個待定參數。經過計算求解,得到參數的全局最優解(如式(1)),求解的結構運動軌跡與原軌跡距離均方根誤差為fval=0.1798,則實際的軌跡與給定的軌跡之間的誤差足夠小,滿足使用要求。結構材料選擇06Cr17Ni12Mo2,其耐腐蝕性比普通06Cr19Ni10(304不銹鋼)好,且具有優良的力學性能。
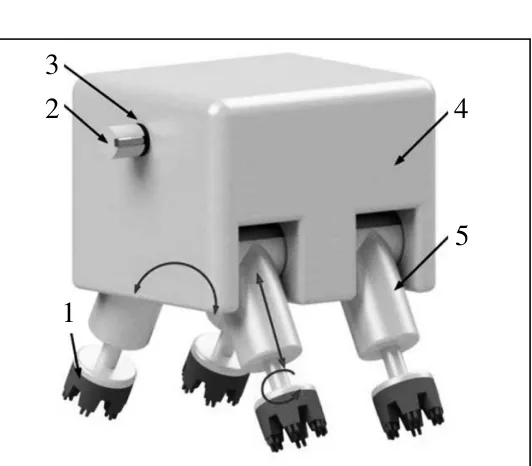
圖3 末端按摩清潔機械手手指部件
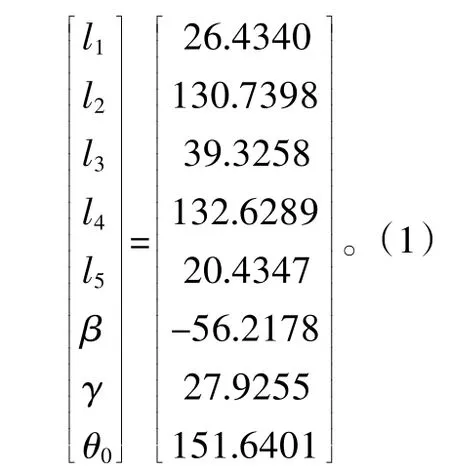
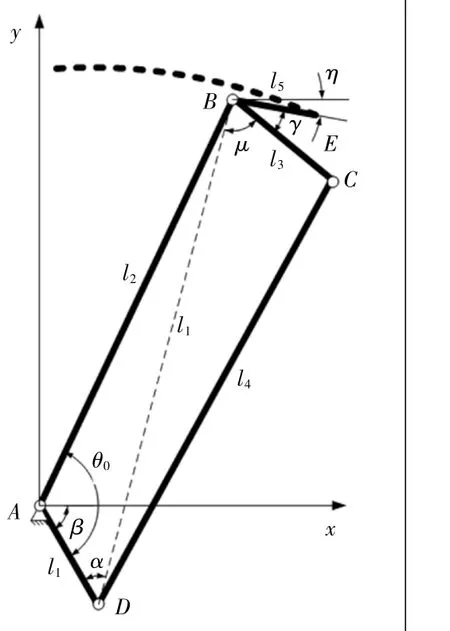
圖4 連桿設計模型
如圖5所示,整個后頸部清潔總成主要由清潔觸頭、主體、連接架和后座組成,清潔觸頭由食品級橡膠制成,輕柔舒適無刺激,可以繞軸旋轉,主體與其連接軸也由橡膠制成,使得其具有小幅度的變形功能,可以極大地增強其對不同人的適應性;連接架由0Cr19Ni制成,具有良好的防水與防腐蝕性;后座也由0Cr19Ni制成,其與連接架通過軸連接,使得主體可以繞連接軸旋轉,后座內的電動機通過齒輪帶動主體主動小幅度(±45°)往復旋轉,從而實現對人體后頸部的按摩清洗。考慮到不同人的頭部尺寸差異,為此在后座上安裝彈簧。
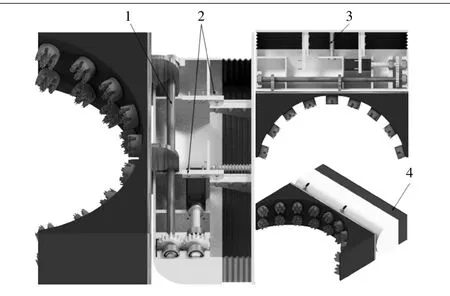
圖5 后頸部清潔總成
2.2 背部清潔模塊的設計
背部清潔模塊的結構方案采用笛卡爾坐標結構。為了更好地對人體背部進行全面的清潔,根據人體背部的形狀特點,本文將人體背部簡化視為一個連續均勻的曲面。確定了背部清潔機構的工作空間:x軸100 mm,y軸400 mm,z軸600 mm。實際沐浴機器人工作時,可以采用相機拍照與激光位移傳感器定位分析得出更加具體的動作范圍[4]。
通過參考大量資料,分析得出背部清潔按摩力通常分為3種,按力度從小到大及作用層面依次分為表皮層按摩力、真皮層按摩力和皮下組織按摩力[5]。本文選擇清潔按摩力度選擇真皮層按摩力,既可以有效清潔背部,又可以起到一定的按摩作用。
背部清潔末端執行器仿人的手掌設計,具有變形的功能,自動適應人體背部曲面形狀,如圖6所示。其尺寸數據參考前面背部清潔工作空間和《GB/T 16252-1996 成年人手部號型》相關數據。背部清潔末端執行器直接與人體的背部皮膚接觸,每個橡膠觸頭安裝在觸頭安裝板上,其后裝有輕質彈簧,受壓后向里收縮,使得整個背部清潔末端執行器能完美地貼合人體背部曲線。每個橡膠觸頭上布置有多個小觸頭,既可以輕松地清潔背部,又可以起到緩沖的作用。為了防止背部清潔力度過大,在背部清潔末端執行器內安裝有壓力傳感器,可以實時監測背部清潔力。
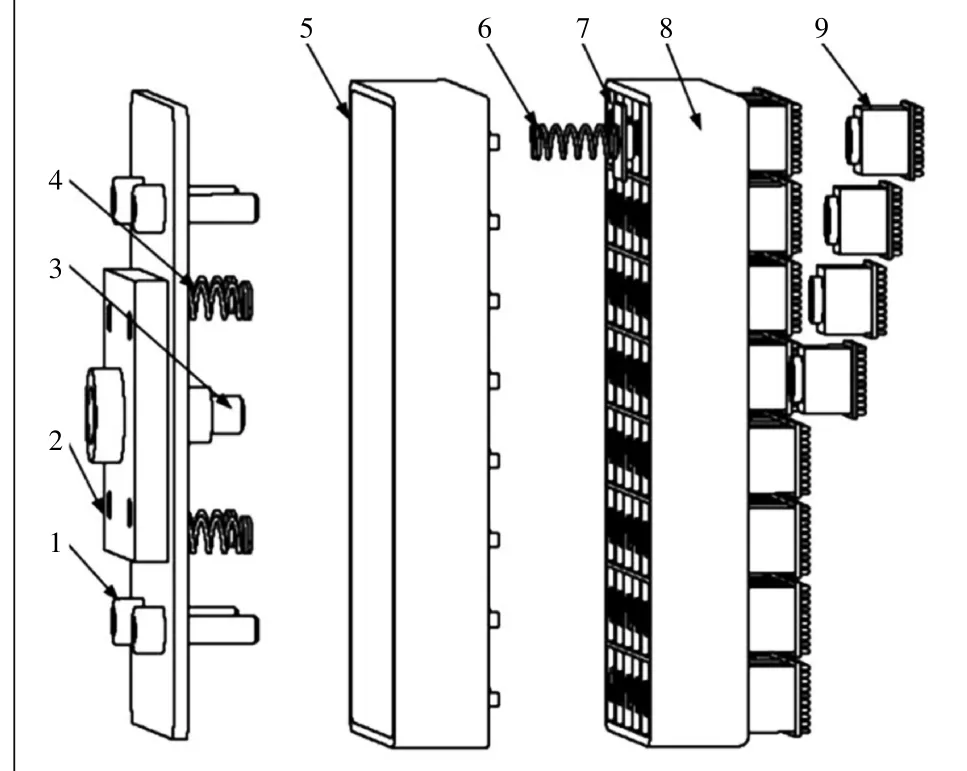
圖6 背部清潔末端執行器
連接手臂采用笛卡爾坐標結構機械臂帶動末端執行器在空間中變換位置,將連接臂結構分為z軸方向的升降總成、y軸方向的縱移總成和x軸方向的橫移總成。
橫移總成采用封閉式設計,滾珠絲桿傳動結構,背部清潔末端執行器與上層連接架直接連接,而中層連接架再連接滑塊和上層連接架,配合防水蓋板可以極大地增強防水性能,如圖7所示。
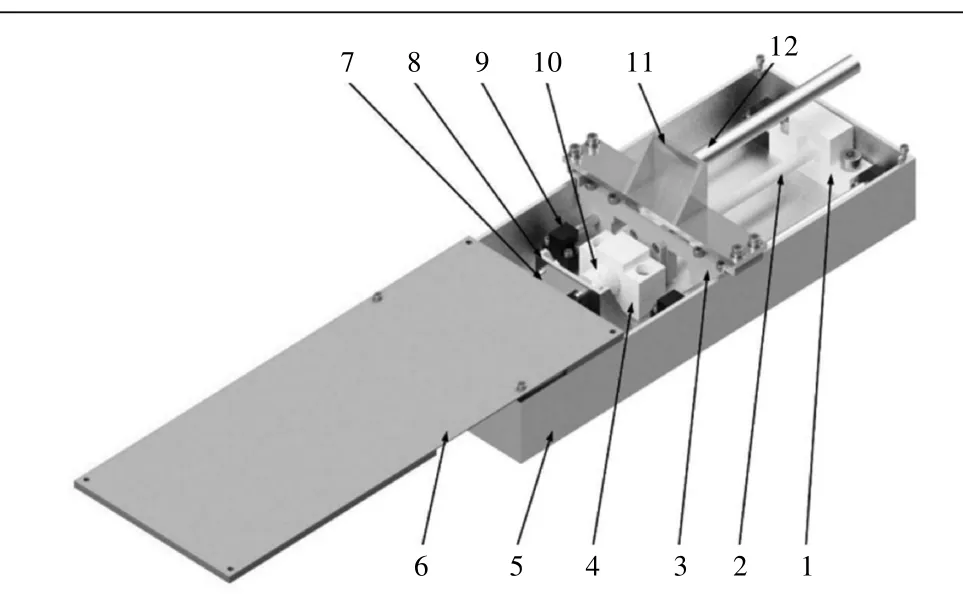
圖7 橫移總成
縱移總成采用滾珠絲杠結構和防水式架板設計,采用鋁合金材料的帶臺階的短架板和長架板作為縱移總成的機架,帶臺階的短架板可以保證滑軌水平面的平行度,而長架板的階梯式設計也保證了兩條滑軌豎直面的平行度;而在整個縱移總成外面設計覆蓋有不銹鋼板,可以極大地增強防水性能,如圖8所示。
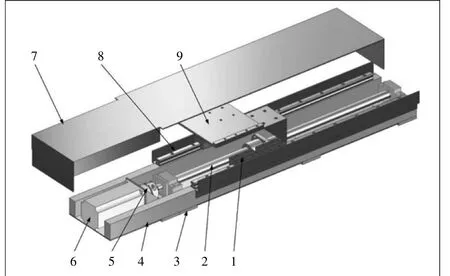
圖8 縱移總成
升降總成如圖9所示,圖中防水蓋板沒有顯示出。安裝底板上安裝布置有鋁合金材料的長安裝條,長安裝條上裝有直線導軌。中層連接架直接連接滑塊和上層連接架,上層連接架則直接承載縱移總成。
2.3 姿態扶助模塊的設計
姿態扶助模塊如圖10所示,座椅由兩個座椅電動缸支撐,兩個伸縮扶手分為由兩個電動缸驅動,扶手前后兩節相對運動改變自身長度,使得其可以更好地適應不同體型的人;當人站起時,電動缸動作使得座椅面推動人的臀部,扶手給予人上半身向上的力,可幫助人站起。
3 沐浴機器人的控制系統 層

圖9 升降總成
沐浴機器人助手控制系統的設計方案如11所示,工業控制計算機與用戶進行交互,將信號傳送到下位機PLC,由PLC發送指令給各組件完成動作[6]。工控機即工業控制計算機,是一種采用總線結構,對生產過程及機電設備、工藝裝備進行檢測與控制的工具總稱[7]。工控機防磁、防塵、防沖擊,可靠性和穩定性很高。工控機的選擇要考慮通信方式、接口、軟件開發環境、CPU運算性能、I/O接口數量、尺寸、性能及成本等因素,選擇研華ARK-2121L。PLC(從站)選擇臺達DVP-15MC11T,其與工控機通過網口通信。觸摸屏選擇臺達DOP-W157B,分辨率為1024×768,大屏幕使得老年人可以更加輕松識別屏幕上的內容并且準確地操作沐浴機器人,觸摸屏通過RS485接口與工控機進行通信。
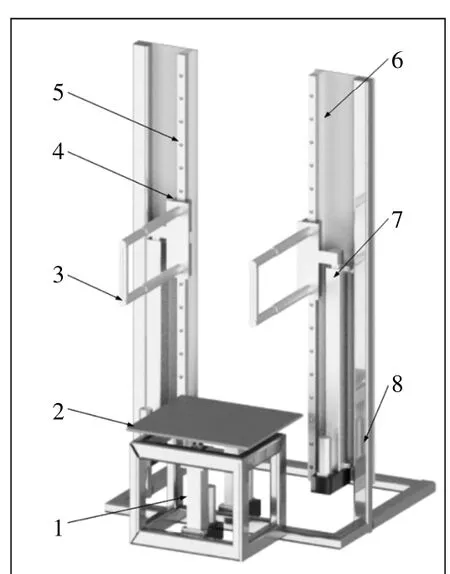
圖10 姿態扶助模塊
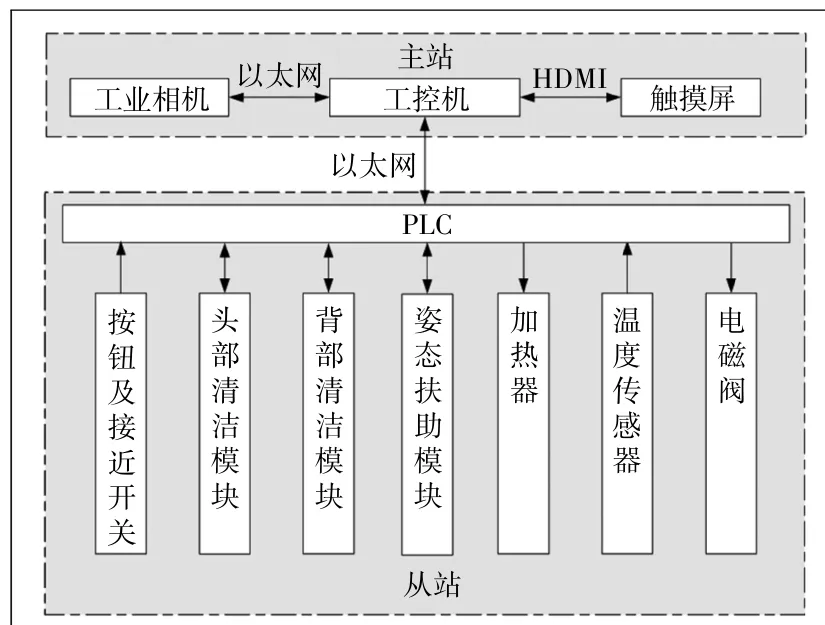
圖11 家用沐浴機器人助手控制系統總體設計方案
用戶使用沐浴機器 人時,可以通過按鈕或者觸摸屏 操作。觸摸屏可以設置沐浴機器人的參數,并實時顯示沐浴機器人的工作狀態,用戶可以便捷地使用沐浴機器人。
4 結 論
沐浴機器人助手可以主動輔助用戶進行沐浴的全過程,大大減輕了家庭的護理壓力,提升了老年人的生活質量。沐浴機器人助手有針對性地設計了頭部清潔、背部清潔及姿態扶助等功能結構,使得其符合廣大老弱人群使用要求。這種主動式多功能沐浴機器人仍然有很大的改進空間,例如沐浴水流若使用超聲波賦能則可減輕機械結構的動作力度,主動式多功能沐浴輔助機器人改變了老人沐浴需要多人看護的情況,是未來養老服務機器人領域的發展方向之一。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
