基于5G和北斗系統的高樓清潔機器人的設計和研究
2020-11-26 09:21:22榮憶寧鄧仕明
通信電源技術 2020年15期
龍 鑫,袁 練,榮憶寧,鄧仕明,陳 艷
(湖南信息學院,湖南 長沙 410151)
0 引 言
本文旨在設計一個城市高層建筑的機器人自動清潔系統,替代高風險的人工作業和成本高昂的自動擦窗機作業,并大幅提高清潔效率。目前,壁面清潔機器人在發展過程中受到多種因素的制約,如不具備針對各類壁面的通用性、研發周期長以及建筑物壁面環境復雜惡劣等。因此,以北斗定位導航作為機器人的導引系統,將北斗系統、機器人、物聯網、智能控制以及機器視覺等技術結合起來,打造一款高樓清潔機器人,以高效安全地管理和處理區域衛生,對解決現實問題有著深刻的意義。
1 機器整體介紹
此次設計的是一種攀爬機器人,包括機器人主體、頂蓋以及攀爬機械臂。機器人主體的內部中心處設有水箱,水箱的前側從左至右依次設有控制機構和真空機構,后側安裝有驅動機構,底部兩側設有防跌落傳感器,另貼近水箱的底部安裝有清洗盤。清洗盤的底部開設有噴孔,且安裝有清潔刷。整體裝置可實現幕墻清洗和檢測等高空作業[1]。攀爬機械臂的設計保證了機器人使用的方便和靈活,增強了使用的安全性,可替換風險程度較高的高空蜘蛛人清潔作業。由于具有較高的穩定性和實用性,因此它具有一定的推廣價值。
2 機器運動過程
使用機器人時,通過控制機構接收外部控制端的控制信號。北斗為機器人提供實時的位置信息和導航信息,由機器人主體內部的驅動機構驅動攀爬機械臂實現攀爬行走動作[2]。攀爬機械臂底端的真空吸盤與真空機構之間通過導氣管連接。真空機構具有自動探測補償吸附力,實時監控氣壓狀況,利用真空吸盤的真空吸附原理吸附在玻璃幕墻表面。機器人主體前側的監控窗口可以觀察玻璃幕墻的細節,便于遠程遙控控制機器人主體清潔盤底部的噴孔,配合清潔刷清洗玻璃幕墻[3]。此外,防跌落傳感器可以有效感知幕墻邊緣,牽引掛環可以連接安全吊具,防止機器人高空攀爬時的意外脫落。
3 機器主要功能設計實現和分析
機器人按照規劃區位路線進行規律運行時,具有對物體的辨別、判斷、處理以及執行的動作能力,具有發現目標并執行動作的操作能力,還具有遠程集中管理等系列集成功能。機器運動中央管控可視化界面,如圖1所示。
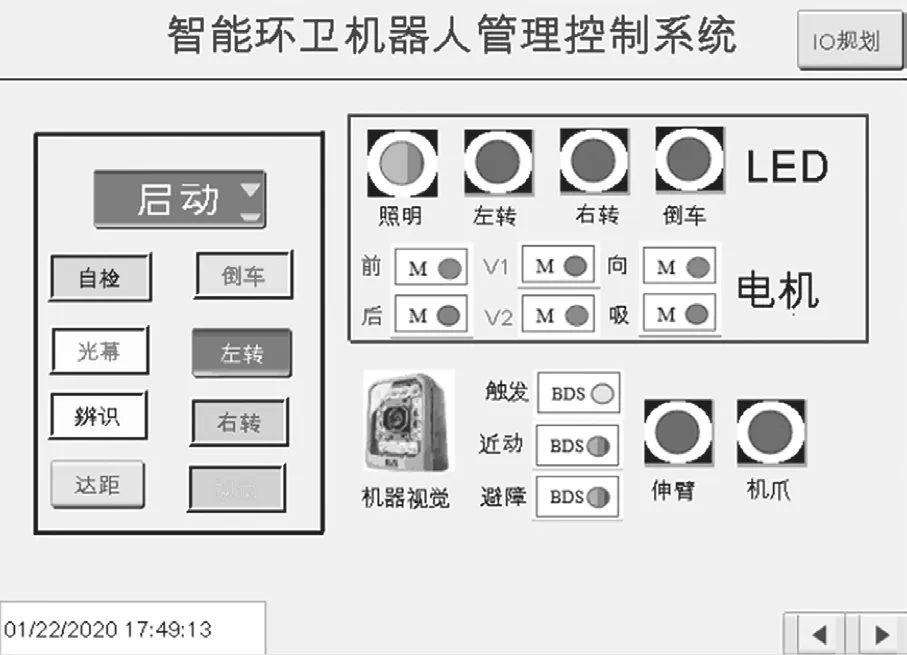
圖1 機器運動中央管控可視化界面
3.1 電機動作系統分析
根據機器人要達到的運動控制功能可知,系統的主要控制對象是動力驅動電機、吸盤電吸電機、方向控制電機、氣壓泵、伸縮氣壓控制閥以及抓手氣壓控制閥。驅動電機為小車提供前后距離方向運動的動力;吸盤電吸電機是參考吸塵器的原理所設計的吸盤的動力源;方向控制電機是小車機器人的轉盤控制動力源;氣壓泵為機器人提供整體執行動作驅動執行邏輯,包括吸盤臂管的伸縮和吸盤頂部的抓手動作等,均采取氣壓驅動。
3.2 傳感檢測系統
傳感檢測系統對于機器人而言相當于人的感觀,是機器人獲取外界數據信息的直接介質。本機器人系統將采用貝加萊集成機器視覺,應用其智能傳感器實現機器視覺。通過多核處理器和集成的FPGA圖像預處理,可實現多功能的智能校對和識別。此外,對前進路線障礙與目標的識取采用紅外光幕+貝加萊機器視覺實現,同時對目標的判斷、識別、校對以及智能路線規劃將大量運用機器智能視覺和AI處理。智能傳感通過紅外光幕獲取目標,通過智能視覺對比對象并與機器庫中的歷史對象對比,判斷目標是否為清掃對象[4]。例如,機器人通過紅外光幕大范圍地對外部工作環境進行掃描判斷,發現類似目標時通過機器視覺進行確認,然后進行運動并觸發執行機構的操作。
3.3 吸盤與機器爪驅動功能分析
本設計對于垃圾物體的拾取收攏采取吸盤和機械爪二元制。輕小垃圾通過吸盤吸取,同時吸盤頂部裝取三爪機器手,以抓取收攏較大較重的垃圾。吸盤的伸縮和機械爪的動作都通過氣壓傳動實現。因為氣壓傳動只需空氣壓縮機就可以源源不斷地汲取大氣,因此無論從機身重量、經濟還是能源獲取方面而言,都是較優的選擇。
3.4 整體機身結構
設計的機器人擁有類似小車一樣的架構作為機身底盤,同時擁有智能控制系統、智能傳感檢測系統、氣壓傳動執行系統、吸盤機械爪執行機構、收納箱以及伺服電機驅動系統等。
3.5 遠程集中在線管理控制系統
正常狀態下,機器被布置在設定區域,根據定義在規劃區域巡回運轉,并通過實時追蹤定位和實時檢測反饋機體運行狀態信息。而本次設計的系統采取人機界面(HMI)、數據采集以及監視平臺進行遠程集中在線管理,即通過SCADA系統集中監控管理區域各個工作機器的工作狀態、運行狀況以及機身各處的狀態,從而實現對各工作機器的實時跟蹤管理、實時在線檢故運維以及實時調節規劃和診斷[5]。
4 機器人控制與監視實現
攀爬機器人自主根據AI控制刷洗鏡面。為保障它的安全可靠,需實現對機器人實時狀態的監控及運行數據的交互,包括機器人的能量、動作、控制輸入輸出以及機器保護等狀態信息。同時,操作員通過機身相機可清晰觀察檢驗機器人刷洗的潔凈度,實現全方位機器運行、機器保護以及任務進度狀況的監控。這種功能主要依靠人機界面和SCADA數據采集與監視控制系統實現,即對嵌入式AI控制器進行監視控制,同時通過控制器實現對機器人機體的監控。
設計采用具有高可靠、低延時以及海量機器通信不斷線特性的5G無線網絡進行傳輸。當機器啟動時,智能網關實時采集數據并通過移動通信傳輸至云端,用戶通過PC人機界面實時監控機器。人機界面集控端采用組態軟件,開啟DHCP設置和ETH設置。Default Gateway為網關路由,IP為192.168.1.117且DNS為ON時,可實現人機界面實時無線監控機器系統。由于系統對網絡速度的要求較高,因此采用5G技術為物聯環境提供一條高速通路[6]。機器實時無線監控管理如圖2所示。
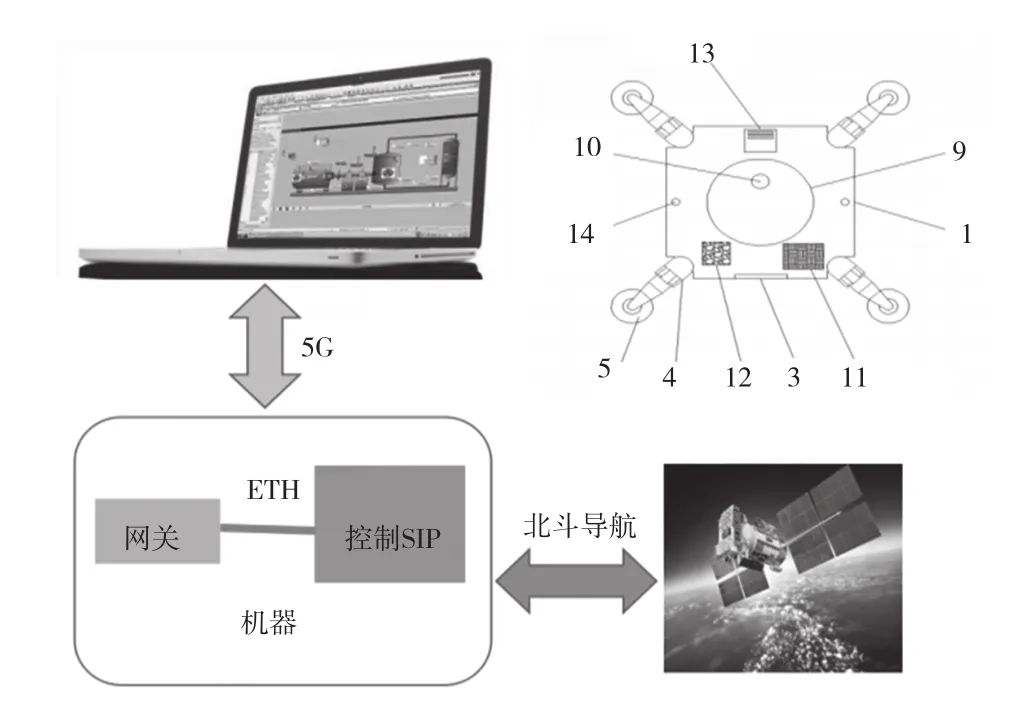
圖2 機器實時無線監控管理
5 機器設計與創新
設置攀爬機械臂和驅動機構,由驅動機構驅動攀爬機械臂實現攀爬行走動作,保證了本機器人使用的方便靈活,可替換風險程度較高的高空蜘蛛人清潔作業。真空吸盤與真空機構之間通過導氣管連接,而真空機構具有自動探測補償吸附力,利用真空吸盤的真空吸附原理可吸附在玻璃幕墻表面,從而實現對幕墻清洗、檢測等高空作業。通過設置監控窗口可以觀察玻璃幕墻的細節,便于遠程遙控控制機器人清潔盤底部的噴孔,并配合清潔刷對玻璃幕墻進行精細的清潔。此外,該機器人設置了防跌落傳感器和牽引掛環。防跌落傳感器可以有效感知幕墻邊緣,牽引掛環可以連接安全吊具,防止機器人高空攀爬時意外脫落,增強使用的安全性。
6 結 論
設計緊密結合北斗、5G等技術,致力于為高樓提供一種智能化清潔方案。北斗和5G等越來越多的高科技產物的加入,使得現代化城市的建設越來越智能化和科技化。通過北斗時空實時規劃三維定點城市,有助于實現城市的數字化治理。5G的應用則為智慧城市建設提供了一個萬物互聯的生態圈,實現了實時的數據傳輸管理。可見,北斗時空+5G生態圈將為智慧城市的建設開啟全新的時代。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年16期)2021-10-12 05:39:52
建材發展導向(2021年11期)2021-07-28 06:58:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
建材發展導向(2019年10期)2019-08-24 06:26:00
文苑(2018年23期)2018-12-14 01:06:06
上海建材(2018年4期)2018-11-13 01:08:54
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
