一種基于超聲波的泊車輔助系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2020-11-27 08:47:54潘夢(mèng)鷂郇銳鐵呂小勇
汽車電器 2020年11期
王 鋒, 潘夢(mèng)鷂, 郇銳鐵, 呂小勇
(廣東工貿(mào)職業(yè)技術(shù)學(xué)院, 廣東 廣州 510510)
隨著人民生活水平的提高,汽車日益增多,泊車逐漸成為了人們關(guān)注的一個(gè)重要問(wèn)題。泊車入庫(kù)時(shí),汽車自帶的雷達(dá)在車體后退且靠近后方障礙物時(shí),會(huì)發(fā)出聲音報(bào)警,這對(duì)泊車入庫(kù)有一定的輔助作用;此外,部分高級(jí)轎車帶有倒車后視影像,這也有助于泊車入庫(kù)。但在泊車入庫(kù)過(guò)程中,若一次倒車入庫(kù)不成功而需前行調(diào)整時(shí),當(dāng)車體接近車前障礙物,雷達(dá)壓根不報(bào)警,倒車影像亦無(wú)提示,此時(shí)只能憑目測(cè)或感覺(jué)前行挪動(dòng)。此外,泊車入庫(kù)過(guò)程中,無(wú)論雷達(dá)或倒車影像是否有報(bào)警或提示,但均無(wú)法給出車體與前后障礙物之間的實(shí)際距離,無(wú)法確認(rèn)車頭或車尾還有多少擠壓空間,只能憑感覺(jué)進(jìn)行挪動(dòng),這對(duì)于新手駕駛員泊車入庫(kù)或在狹小的空間側(cè)方停車時(shí)猶為不便,尤其是在狹小的道路進(jìn)行側(cè)方停車時(shí),在其它行駛車輛的催促下,稍不留神就可能刮蹭到前后車或別的障礙物,進(jìn)而造成財(cái)產(chǎn)損失或引起糾紛。本文設(shè)計(jì)的超聲波泊車輔助系統(tǒng)可有效解決這一問(wèn)題。
與傳統(tǒng)的超聲測(cè)距相比,本設(shè)計(jì)結(jié)合可視化的測(cè)量技術(shù),采用由6組超聲波傳感器組成探測(cè)網(wǎng)絡(luò),對(duì)車體與前后障礙物之間的距離進(jìn)行全面測(cè)量,測(cè)量值送入12864液晶屏實(shí)時(shí)顯示,并根據(jù)6組超聲波傳感器測(cè)量所得的數(shù)據(jù),給出報(bào)警文字提示及不同頻率的聲音報(bào)警信號(hào)。超聲波泊車輔助系統(tǒng)使用簡(jiǎn)單,直觀便捷,顯示內(nèi)容清晰,方便在汽車運(yùn)動(dòng)過(guò)程中對(duì)數(shù)據(jù)進(jìn)行觀測(cè),是輔助泊車的得力工具。
1 超聲波測(cè)距原理
目前,障礙物探測(cè)很多采用超聲波傳感器。超聲波測(cè)距可以直接測(cè)量近距離目標(biāo),縱向分辨率高、適用范圍廣、方向性強(qiáng),并具備不受光線、煙霧、電磁干擾等因素影響,覆蓋面較大等優(yōu)點(diǎn)。目前,超聲波測(cè)距已廣泛應(yīng)用于液位測(cè)量、避障、測(cè)距及檢測(cè)等領(lǐng)域,應(yīng)用前景廣闊[1-5]。
超聲波測(cè)距的工作原理:發(fā)射器向外發(fā)射超聲波,超聲波在介質(zhì)中傳播,遇到障礙物后反射,產(chǎn)生回波,接收器接收回波[6]。通過(guò)檢測(cè)發(fā)射超聲波與接收回波之間的時(shí)間差t,求出目標(biāo)障礙物距信號(hào)發(fā)射源的距離d,計(jì)算公式為:

式中:v——超聲波波速,m/s;t——發(fā)射超聲波與接收回波之間的時(shí)間差,s;T——環(huán)境溫度,℃;S——海水鹽度,按千分比計(jì)算;P——海水靜壓力,Pa。
2 超聲測(cè)距模塊及其工作原理
本設(shè)計(jì)采用的超聲波測(cè)距模塊,其原理圖如圖1所示,圖2為其超聲波時(shí)序圖。
當(dāng)超聲波測(cè)距模塊的Trig端 (圖1的J1-3腳) 收到一個(gè)10us以上的脈沖觸發(fā)信號(hào)時(shí),該模塊內(nèi)部將發(fā)出8個(gè)40kHz脈沖信號(hào),并從Echo端 (圖1的J1-2腳) 輸出回響信號(hào)。當(dāng)模塊檢測(cè)到回波信號(hào)則停止輸出回響信號(hào),如圖2所示,回響信號(hào)的脈沖寬度與所測(cè)的距離成正比。通過(guò)計(jì)算發(fā)射信號(hào)到收到回響信號(hào)的時(shí)間就可以根據(jù)公式 (1) 計(jì)算得到發(fā)射器與障礙物之間的距離d。為避免發(fā)射信號(hào)對(duì)回響信號(hào)的干擾,建議測(cè)量周期為60ms以上。

圖1 HC-SR04超聲波測(cè)距模塊原理圖

圖2 超聲波時(shí)序圖
3 超聲波泊車輔助系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
3.1 系統(tǒng)硬件設(shè)計(jì)
本文設(shè)計(jì)的超聲波泊車輔助系統(tǒng)由主控單元、超聲波探測(cè)網(wǎng)絡(luò)、溫度傳感器、液晶顯示模塊、報(bào)警模塊等構(gòu)成,其結(jié)構(gòu)框圖如圖3所示。主控單元采用微芯 (Microchip) 公司的PIC16F877A,主要用于距離信號(hào)采集、溫度信號(hào)采集及數(shù)據(jù)修正、液晶顯示控制、聲音報(bào)警控制等。溫度傳感器采用DALLAS公司的DS18B20單總線數(shù)字式溫度模塊,溫度信號(hào)用于修正超聲波傳感器檢測(cè)的距離值,以提高檢測(cè)精度。顯示模塊采用12864液晶,報(bào)警模塊采用帶驅(qū)動(dòng)電路的蜂鳴器模塊。超聲波探測(cè)網(wǎng)絡(luò)由6個(gè)HC-SR04模塊組成,車頭和車尾各安裝3個(gè),其安裝示意圖如圖4 所示,其中前中與后中安裝于正前、正后方向,前左與前右及后左與后右均與車體成45° 角,用于檢測(cè)前左、前中、前右、后左、后中、后右6個(gè)位置與障礙物之間的距離。
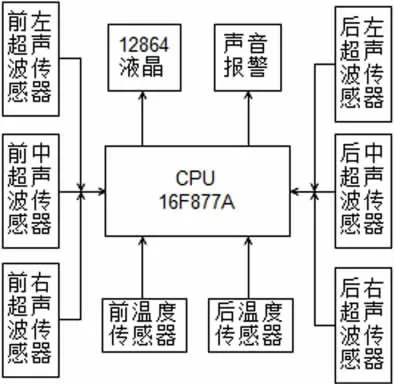
圖3 超聲波泊車輔助系統(tǒng)結(jié)構(gòu)框圖
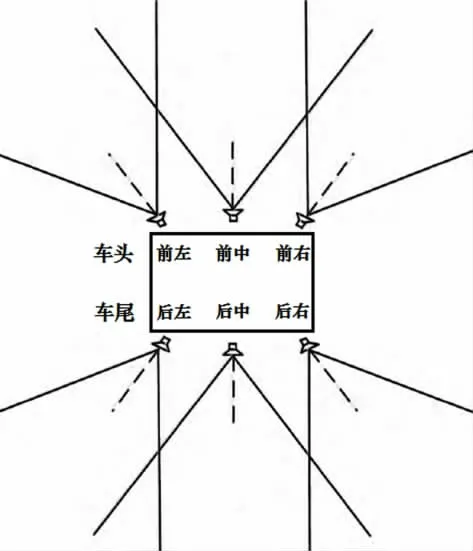
圖4 超聲波探測(cè)網(wǎng)絡(luò)安裝示意圖
3.2 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件采用模塊化設(shè)計(jì),主要包括:超聲波探測(cè)網(wǎng)絡(luò)距離測(cè)算程序、溫度測(cè)算程序、數(shù)據(jù)處理程序、顯示程序、報(bào)警程序、中斷服務(wù)程序等。圖5為主程序流程圖,系統(tǒng)輪流發(fā)出6組觸發(fā)脈沖,每組觸發(fā)脈沖輸出后進(jìn)行回波檢測(cè),用于獲取超聲波在車前及車尾6個(gè)方向的傳輸時(shí)間,回波時(shí)間與檢測(cè)距離成正比,檢測(cè)距離經(jīng)溫度修正后發(fā)送至12864液晶顯示,當(dāng)距離過(guò)小時(shí),給出報(bào)警文字提示及不同頻率的聲音報(bào)警信號(hào),距離越小,報(bào)警聲音頻率越高。

圖5 超聲波泊車輔助系統(tǒng)程序流程圖
3.3 系統(tǒng)的硬件實(shí)現(xiàn)
根據(jù)系統(tǒng)硬件結(jié)構(gòu)框圖搭建硬件模型,按系統(tǒng)程序流程圖編寫控制程序,對(duì)系統(tǒng)功能進(jìn)行測(cè)試。圖6、圖7分別為超聲波傳感模塊車前車后測(cè)點(diǎn)安裝圖,由6個(gè)超聲波傳感模塊組成一個(gè)超聲波探測(cè)網(wǎng)絡(luò)。前中與后中傳感模塊安裝于車輛正前、正后方向,前左與前右及后左與后右傳感模塊均與車體成45°角,分別用于檢測(cè)前左、前中、前右、后左、后中、后右6個(gè)位置與障礙物之間的距離。圖8為控制及報(bào)警、顯示模塊,在距離較小時(shí),能及時(shí)發(fā)出文字及聲音報(bào)警,降低車輛碰撞事故概率。

圖6 車前測(cè)點(diǎn)安裝圖

圖7 車后測(cè)點(diǎn)安裝圖
4 測(cè)量結(jié)果分析
圖9為倒車過(guò)程中車尾障礙物的一組測(cè)試數(shù)據(jù),其中后左為25cm, 后 中 為20cm,后右為25cm,前左為400cm,前中為195cm, 前 右 為400cm。對(duì)于車尾傳感器數(shù)據(jù),因后左與后右傳感模塊與車體成45°角,故后左與后右測(cè)量值稍大于后中測(cè)量值,車輛直線倒車時(shí)應(yīng)以后中數(shù)據(jù)為準(zhǔn)。對(duì)于車前傳感器數(shù)據(jù),前中測(cè)量值為195cm,表明車輛與正前方障礙物距離為195cm,因前左與前右傳感模塊與車體成45°角,前左與前右傳感模塊未檢測(cè)到障礙物,故前左、前右顯示最大測(cè)量值400cm。

圖8 控制及報(bào)警、 顯示模塊

圖9 系統(tǒng)倒車測(cè)試數(shù)據(jù)
表1數(shù)據(jù)為系統(tǒng)測(cè)量距離與實(shí)際距離的測(cè)量記錄,系統(tǒng)測(cè)量數(shù)據(jù)只保留整數(shù)部分。經(jīng)多次測(cè)試,并與實(shí)際距離值對(duì)比,系統(tǒng)測(cè)量誤差約1cm,滿足使用要求。

表1 測(cè)量數(shù)據(jù)記錄cm
5 結(jié)語(yǔ)
超聲波測(cè)距具有精度較高、成本低、抗干擾強(qiáng)等優(yōu)點(diǎn)。本文利用由6組超聲波模塊組成的超聲波探測(cè)網(wǎng)絡(luò)對(duì)泊車過(guò)程中的車前、車后障礙物距離進(jìn)行全面測(cè)量,在距離過(guò)小時(shí)給出文字及聲音報(bào)警提示,可以有效降低泊車過(guò)程中的碰撞事故,縮短泊車時(shí)間。經(jīng)多次測(cè)試,系統(tǒng)誤差在1cm以內(nèi),滿足使用要求。在此基礎(chǔ)上,可以進(jìn)一步優(yōu)化超聲波探測(cè)算法,提高測(cè)量精度,提高系統(tǒng)的可靠性及實(shí)用性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
