地下礦用液壓鉆機重回歸算法運用及故障分析
2020-11-27 10:04:54劉文星
機電工程技術 2020年10期
劉文星
(張家口宣化華泰礦冶機械有限公司,河北張家口 075100)
0 引言
本文介紹的一款自動換桿可無線遙控帶儲桿器的地下礦用液壓采礦鉆車,主要目的是降低地下采礦操作人員的數量,減少鉆機操作者冗余的動作,減輕操作人員的勞動強度,使操作人員遠離未經加固的巖石,消除采礦生產過程中的系列性安全隱患,并且大幅提升作業安全性和舒適性。
本文主要描述該機器在工作斷面鉆孔工況下,電控系統控制程序中用到的數學公式,以及為適應實際采礦鉆孔工藝,程序做出的局部調整。
地下礦用液壓采礦鉆機,采用的控制系統是以CAN 技術為基礎,對鉆機的鉆孔與其它功能進行控制和監測,如圖1所示。

圖1 礦用液壓鉆機在地下礦山的作業施工狀態
1 數學公式
1.1 重回歸法
在工程應用中有很多工作數據,需要通過數學公式使之相關聯,從而服務于機器設備的實際工作中。地下礦用液壓采礦鉆機控制程序中運用的數學公式,是結合實際數據樣本采集,使用重回歸數學法計算得出。通過Matlab[1]程序,將重回歸計算方法[2]編譯成計算機代碼;使用文本命令讀取樣本數據,即textread 命令,讀取dat 格式的數據文件;采用最小二乘法[3-4]對原始數據進行系統性計算。從而歸納出一套與實際情況相匹配的,且僅適用于本機型的數學公式和曲線。
樣本數據采集。記錄地下礦用液壓采礦鉆機實際工作中相關壓力值,全文使用P 表示,以及對應的控制器輸出的信號值,全文使用x表示;直到壓力值溢流,具體采集的數值格式如表1所示數據樣本,表中數據僅截取了原始樣本數據中的兩組數值。表示采集的數據越多,得出的數學方程越趨近于真實情況。

表1 數據樣本
將二次回歸[3]計算步驟編寫入Matlab 軟件時,采集數據的輸出信號設置為方程的因變量,而相對應的液壓實際壓力值作為方程的自變量輸出。一切就緒,運算程序,將會得出3 個回歸方程系數,分別為A、B、C,以及1 個關聯系數r,方程系數如圖2所示。這些系數的輸出方式與編譯的程序相關,格式不是唯一,也可編譯為直接顯示數學公式,如圖3所示線性回歸結果。Matlab程序得出的3 組回歸方程系數,用于組合成二次方程;而其下的關聯系數[4-5],則用于判斷此方程與真實數據之間的契合度,幫助研究人員判斷方程的可信度,是否值得采用。
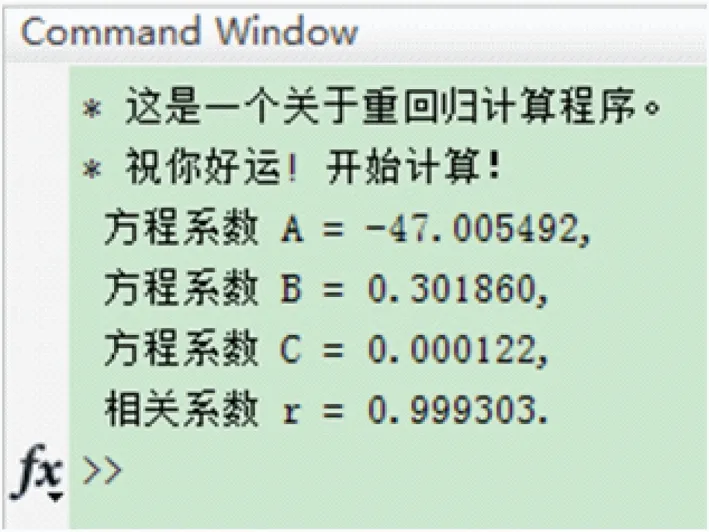
圖2 方程系數
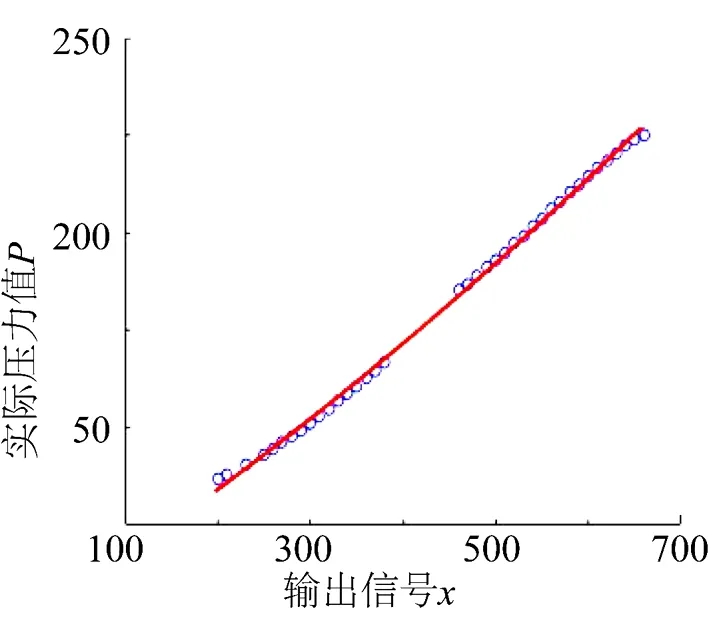
圖3 重回歸曲線
重回歸計算方法[4-5]。歸納原始樣本數據得出的方程系數A=-47.005 492;方程系數B=0.301 860;方程系數C=0.000 122;相關系數,即關聯系數為0.999 30,關聯系數轉化為百分比表達為99.9%。根據相關系數值99.9%可知,得出的系數所組成的二次數學方程,與采集的原始數據幾乎完全吻合,如圖3 曲線,此圖深色線是通過Matlab 程序運算重回歸計算法得到的二次數學公式;淺色圓圈則是Matlba 通過readtext 命令讀取的dat 格式的原始數據,一個淺色圓圈代表一組數值。根據以上分析,此組系數可以運用于本設備的控制程序中。
最終得出,實際壓力值P 與輸出信號x 之間的二次方程為:

1.2 線性回歸求數學公式
由于圖3 曲線顯示曲線趨于直線,隨對原始數據進行線性回歸的求解。一是核對所得方程的合理性;二是為后續系列產品的應用做相應鋪墊。
同樣采用最小二乘法計算。使用Matlab 軟件將線性回歸方法編譯成機器語言。重回歸方法與線性回歸法均采用最小二乘法,但Matlab 程序不同,不可混淆使用。同樣便于數據輸入,采用readtext 命令對dat 格式文件進行讀取。運行結果如圖4所示線性回歸結果;線性回歸方程斜率為0.408,常數項數值為-67.512,原始數據共38組,對應的關聯系數為0.999。
得出的一次數學方程為:

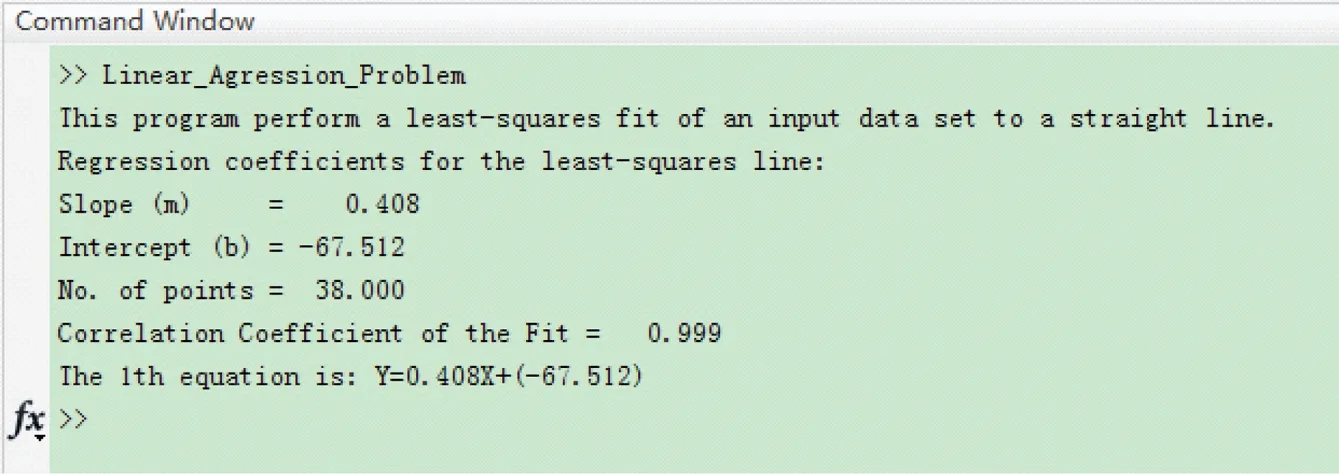
圖4 線性回歸結果
通過關聯系數值99.9%可知,此一次數學方程與原始數據的契合度同樣非常高。原始數據與數學方程顯示在圖5所示線性曲線中。圖中深色線也是通過Matlab 程序得出的二次數學方程;淺色圓圈則是采集的原始數據,同樣一個淺色圓圈代表一組樣本數值。

圖5 線性回歸曲線
2 故障分析
2.1 故障一
儲桿器是地下礦用液壓采礦鉆機[6]的一個重要部件,圖6所示為儲桿器[7-8]示意圖。圖中標號1 為儲桿器的機械結構部件,用于存放不同型號和類型的鉆桿和釬桿;標號2 為機械手,用于夾持釬桿,將釬桿存入儲桿器內,或在鉆機工作時,取出釬桿。儲桿器主要功能是儲存不同種類和不同數量的釬桿,保證有足夠的鉆孔工具,供地下礦用液壓采礦鉆機進行鉆孔工作。避免操作人員取鉆桿,人工接桿而造成的時間浪費和人員因操作失誤造成的經濟損失和人身傷害。

圖6 儲桿器示意圖
(1)情況描述
礦用液壓采礦鉆機在某礦山作業時,出現儲桿器無法正常轉庫現象。某一工作時刻,儲桿器旋轉動作出現停止狀況。
(2)故障分析
位于儲桿器機械結構的下方,有數個傳感器,用于控制儲桿器的轉庫動作。安裝位置位于工作裝置表面,雖然設計過程已考慮了必要的防護措施,但也有發生磕碰的可能性。經初步檢查,傳感器沒有出現肉眼可見破損。鑒于釬桿庫旋轉功能動作異常,對直接控制其動作的傳感器有必要進一步檢測。
拆卸3組傳感器,分別對這3組傳感器進行指示燈閃亮檢測。均出現紅燈閃爍指示,表明傳感器均可正常工作。重新啟動設備,此次操作僅針對儲桿器的相關動作。首先單獨操作儲桿器的旋轉動作,一切正常,旋轉速度正常,控制器發出指令后,旋轉動作沒有延時。其次,單獨操作機械手,將鉆桿存入鉆桿庫中;或取出鉆桿,沒有儲桿器沒有異常報警。當儲桿器處于旋轉的工作狀態時,操作者按下控制機械手動作的按鈕,儲桿器出現停止旋轉的狀況。
造成故障的操作方式已找出。造成此現象的原因是,儲桿器處于旋轉工作狀態時,若按下操作機械手的按鈕,即控制器接收到兩套動作指令,控制儲桿器的油液會分流出一部分至機械手臂的油路中,致使控制儲桿器油路中的油液流量降低,引起此油路中的鎖定油缸停止動作。
(3)采取措施
經過多種嘗試,最終確定,調整控制儲桿器工作程序,以適應實際操作環境。將程序代碼調整為:在儲桿器旋轉的過程中,強制鎖定機械手,使儲桿器不受外界控制,控制儲桿器油路中的油液流量不發生變化;當儲桿器旋轉結束,進入下一個指令時,鎖定機械手的指令解除。
2.2 故障二
(1)情況描述
某時段工況,鉆機進行接卸桿操作時,駕駛室內的顯示器中的推進壓力值為0。
(2)故障分析
對于沒有推進壓力,測定相應管路中的流量,發現其數值低于正常值。推進流量開度過低,比例閥沒有完全打開。
(3)采取措施
推進流量開度小的問題,采取恢復顯示器控制推進速度,增加鉆桿的回轉速度。同時采取了額外輔助措施。機器在鉆孔時,當到達鑿巖位置的最后30 mm 時,推進壓力降到45 bar;使釬桿達到震桿狀態,方便卸桿。
3 結束語
圖5所示為線性曲線x軸上在200~250之間的數值,偏離線性回歸求出的數學公式,暫定本設備使用重回歸計算所得方程[8]。由于兩種方程的關聯系數極高,隨線性回歸所算方程用于實驗階段公式。若滿足后續實驗結果要求,系列產品可酌情使用。
