基于慣導(dǎo)系統(tǒng)的智能汽車定位技術(shù)應(yīng)用
2020-11-28 05:55:20寧予張智清劉明春
工業(yè)經(jīng)濟(jì)論壇 2020年5期
文/寧予 張智清 劉明春
高精度定位對無人駕駛汽車的重要性不言而喻。而常用的定位方式若單獨(dú)使用則不能長期穩(wěn)定地為無人駕駛車輛提供高精度的定位信息。本文詳細(xì)介紹了慣導(dǎo)系統(tǒng)的工作原理,把它作為無人駕駛汽車的定位系統(tǒng),能夠?qū)崿F(xiàn)較好的定位效果。
慣導(dǎo)系統(tǒng)是車輛定位的核心設(shè)備,包括慣性傳感器(IMU)和全球定位系統(tǒng)(GNSS)。前者用于檢測車輛加速度與旋轉(zhuǎn)運(yùn)動,實(shí)時估計(jì)車輛運(yùn)動狀態(tài),信息更新頻率高但存在偏差與噪音;后者通過衛(wèi)星定位,可提供三維坐標(biāo)和速度,但信息更新頻率低且信號易丟失;兩者結(jié)合取長補(bǔ)短,能達(dá)到較好的定位效果。
一、慣導(dǎo)數(shù)據(jù)協(xié)議和語句格式
目前GNSS 接收機(jī)上使用最廣泛的協(xié)議是NMEA-0183 協(xié)議,大 多 數(shù) 常 見 的 GNSS 接 收機(jī)、GNSS 數(shù)據(jù)處理軟件、導(dǎo)航軟件都遵守或者至少兼容該協(xié)議。NMEA-0183 協(xié)議定義的語句格式眾多,常用的語句格式有$XXGGA、$XXGSA、$XXGSV、$XXRMC、$XXVTG 等,隨著各種衛(wèi)星系統(tǒng)增多,每種報(bào)文的報(bào)頭不一樣,如GPS 的報(bào)文頭為GP(即上述語句格式中的XX 為GP,則 $XXGGA 對應(yīng)為 GPGGA),GLONASS 的報(bào)文頭為GL,中國北斗衛(wèi)星導(dǎo)航(BDS)的報(bào)文頭為BD,對于多系統(tǒng)聯(lián)合定位(雙星或者多星)的報(bào)文頭為GN。各語句中包含時間、經(jīng)緯度、航向角、海拔高度等定位信息,并按照指定數(shù)據(jù)格式輸出。以$GPGGA 語句格式為例,其語句中的數(shù)據(jù)內(nèi)容如下:
$GPGGA,utc,lat,latdir,lon,londir,QF,sat(No.),hdop,alt,aunits,age,stn(ID),★xx,[CR][LF]
上述語句中各數(shù)據(jù)段的含義如下表所示:
如某時刻慣導(dǎo)系統(tǒng)輸出的一條完整$GPGGA 數(shù)據(jù)為:
$GPGGA,011716.00,3120.998 2885,N,12117.5452325,E,4,23,1.1,26.4000,M,10.305,M,01,1496★6D

編號 名稱 描述格式1 $GPGGA Log header 2 utc UTC時間 (時/分/秒)hhmmss.ss 3 lat 緯度:-90~90度 緯度ddmm.mmmm(度分) 格式 ddmm.mmm 4 latdir 緯度方向:N:北;S:南N/S 5 lon 經(jīng)度:-180~180度 緯度ddmm.mmmm(度分) 格式 ddmm.mmmm 6 londir 經(jīng)度方向:E:東;W:西E/W 7 QF解狀態(tài)0:無效解; 1:單點(diǎn)定位解; 2:偽距差分;4:固定解; 5:浮動解;n 8 sat No.衛(wèi)星數(shù)n x.x 10 alt 高程 h.h 11 a-units 高程單位 M 12 age 差分延遲 dd 13 stn ID 基站號:0000-1023,單機(jī)時:AAAA xxxx 14 *xx Checksum *hh 15 [CR][LF] Sentence terminator [CR][LF]9 hdop 水平DOP值
則 可 知 該 時 刻 經(jīng) 度為 12117.5452325,緯 度 為3120.9982885。 在 車 輛 行 駛 過程中,慣導(dǎo)系統(tǒng)連續(xù)采集車輛位置信息(慣導(dǎo)系統(tǒng)數(shù)據(jù)采集周期20ms-50ms),數(shù)據(jù)處理算法根據(jù)相應(yīng)的語句格式,提取其中的經(jīng)度、緯度和航向角數(shù)據(jù),便可得到車輛連續(xù)的位置信息。
二、慣導(dǎo)數(shù)據(jù)處理
目前GNSS 接收機(jī)普遍采用串口輸出方式。使用工控機(jī)、PC、嵌入式控制器等計(jì)算平臺,通過串口與慣導(dǎo)設(shè)備連接,讀取慣導(dǎo)設(shè)備輸出的串口數(shù)據(jù),根據(jù)數(shù)據(jù)格式協(xié)議進(jìn)行解析,選取所需的數(shù)據(jù)(如經(jīng)緯度、航向角等),通過坐標(biāo)轉(zhuǎn)換,得到平面坐標(biāo)系下的坐標(biāo)信息(X、Y)。
(一)坐標(biāo)系
大地坐標(biāo)系是大地測量中以參考橢球面為基準(zhǔn)面建立起來的坐標(biāo)系。地面點(diǎn)的位置用大地經(jīng)度、大地緯度和大地高度表示。主要涉及三類常用的大地坐標(biāo)系統(tǒng),即參心坐標(biāo)系統(tǒng)(1980 西安坐標(biāo)系、1954 北京坐標(biāo)系)、地心坐標(biāo)系統(tǒng)(WGS-84)和地方獨(dú)立坐標(biāo)系統(tǒng)。
平面坐標(biāo)系,UTM(UNIVERSAL TR ANSVERSE MERCARTOR GRID SYSTEM,通用橫墨卡托格網(wǎng)系統(tǒng))坐標(biāo)是一種平面直角坐標(biāo),通常基于WGS84 橢球。在北緯84°與南緯80°之間共有60 個經(jīng)度帶,它們是6 度分帶。為了避免邊界的經(jīng)度變形,使用了相交柱面進(jìn)行投影。
高斯平面坐標(biāo)系,以中央子午線與赤道的交點(diǎn)作為坐標(biāo)原點(diǎn),以中央子午線的投影為縱坐標(biāo)軸X,規(guī)定X 軸向北為正,以赤道的投影為橫坐標(biāo)軸Y,Y 軸向東為正,形成的坐標(biāo)系。
(二)坐標(biāo)系轉(zhuǎn)換
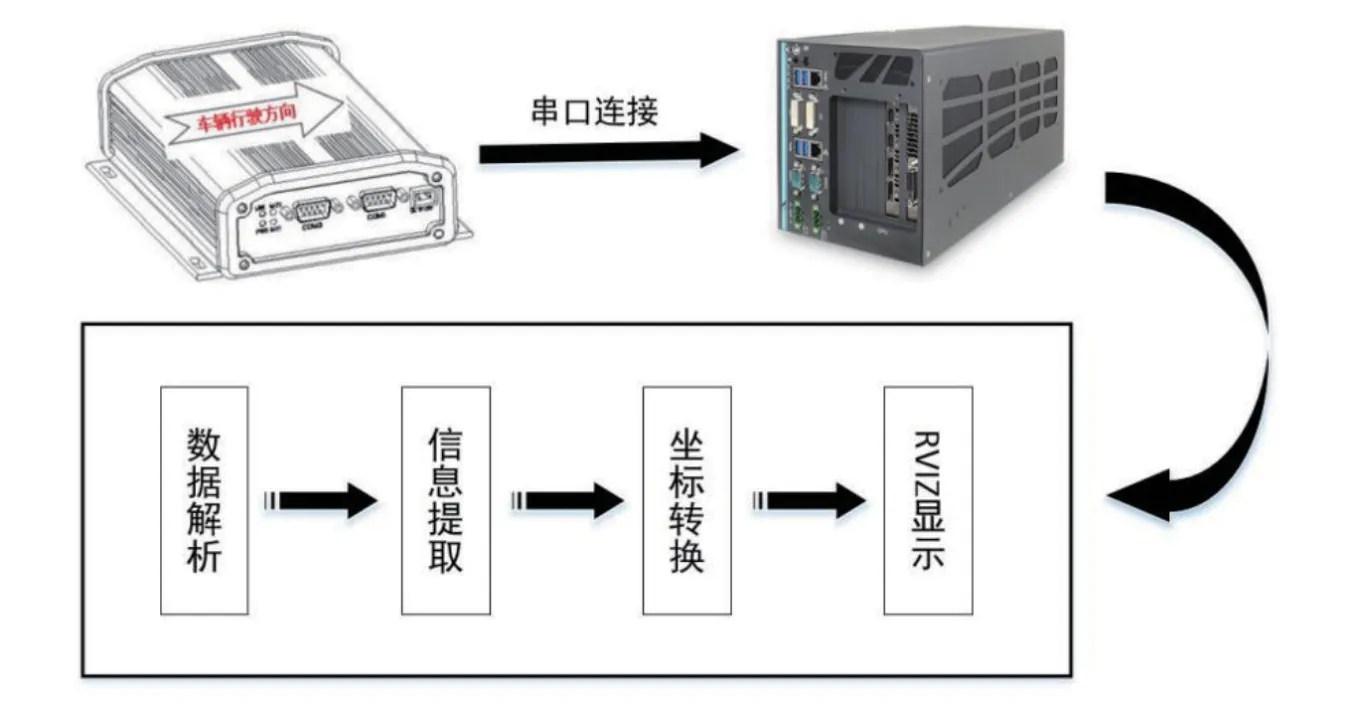
圖1 慣導(dǎo)系統(tǒng)應(yīng)用框圖
GNSS 接收機(jī)輸出的數(shù)據(jù)通常包含經(jīng)、緯度信息,為方便且直觀的得到位置信息,利用坐標(biāo)轉(zhuǎn)換公式,即可將大地坐標(biāo)系的經(jīng)緯度信息轉(zhuǎn)換為平面坐標(biāo)系的坐標(biāo)值。以WGS84 坐標(biāo)系轉(zhuǎn)UTM坐標(biāo)系為例:只針對北半球,中國地區(qū)計(jì)算方法,經(jīng)緯度分別為單位為弧度,UTM 坐 標(biāo) 為(E,N),單 位 為k m,k0=0.9 9 9 6,E0=5 0 0 k m,e=0.0818192。轉(zhuǎn)換公式如下:
利用上述公式并進(jìn)行轉(zhuǎn)換,編寫代碼,其中L 為經(jīng)度,B 為緯度,最后得到X 為平面坐標(biāo)系橫軸,Y為平面坐標(biāo)系縱軸。
三、基于慣導(dǎo)系統(tǒng)的車輛行駛軌跡采集和處理
智能車輛在行駛過程中需要實(shí)時輸出其位置信息,并輸出實(shí)時的行駛軌跡,以作為車輛決策、規(guī)劃和控制的依據(jù)。車輛的位置信息和行駛軌跡通過對慣導(dǎo)系統(tǒng)采集的數(shù)據(jù)進(jìn)行處理得到。
(一)基于ROS 生成實(shí)時行駛軌跡
ROS(Robot Operating System)機(jī)器人操作系統(tǒng),是用于編寫機(jī)器人軟件程序的一種具有高度靈活性的軟件架構(gòu)。ROS 提供一些標(biāo)準(zhǔn)操作系統(tǒng)服務(wù),例如硬件抽象,底層設(shè)備控制,常用功能實(shí)現(xiàn),進(jìn)程間消息以及數(shù)據(jù)包管理。ROS 是基于一種圖狀架構(gòu),從而不同節(jié)點(diǎn)的進(jìn)程能接受、發(fā)布、聚合各種信息(例如傳感,控制,狀態(tài),規(guī)劃等等)。基于ROS 生成車輛實(shí)時行駛軌跡的過程如下:
1.初始化ROS 節(jié)點(diǎn),發(fā)布話題;
2.設(shè)置串口參數(shù),并判斷串口狀態(tài);
3.讀取串口數(shù)據(jù),根據(jù)慣導(dǎo)數(shù)據(jù)格式,判斷是否為需要處理的數(shù)據(jù),如對比數(shù)據(jù)標(biāo)識符是否為$GPGGA;
4.提取經(jīng)緯度、航向角等信息,通過坐標(biāo)轉(zhuǎn)換,將經(jīng)緯度位置信息換算為大地坐標(biāo)系的位置信息;
5.發(fā)布位置坐標(biāo)到RVIZ(機(jī)器人操作系統(tǒng)3D 可視化工具)進(jìn)行顯示,并保存數(shù)據(jù)。
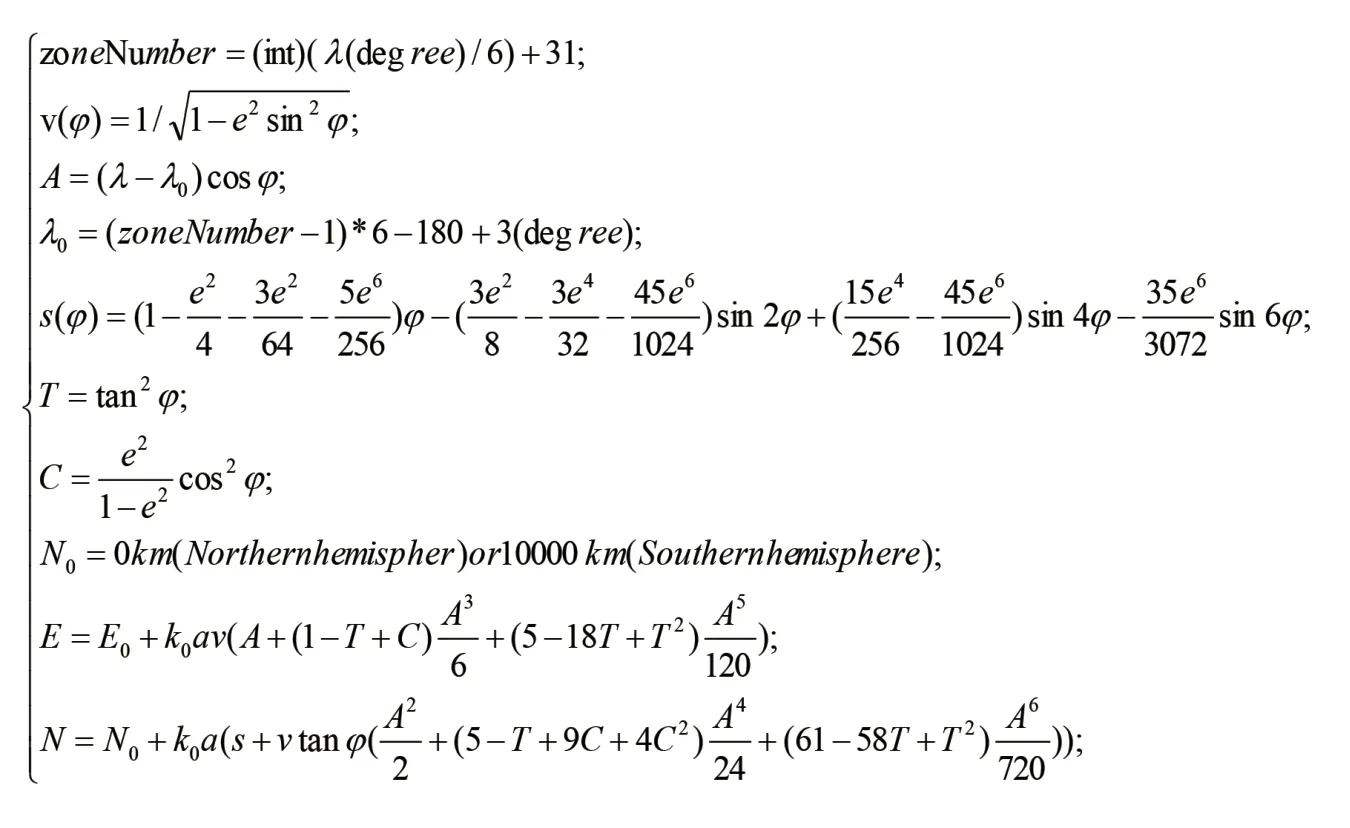
圖2 坐標(biāo)系轉(zhuǎn)換公式
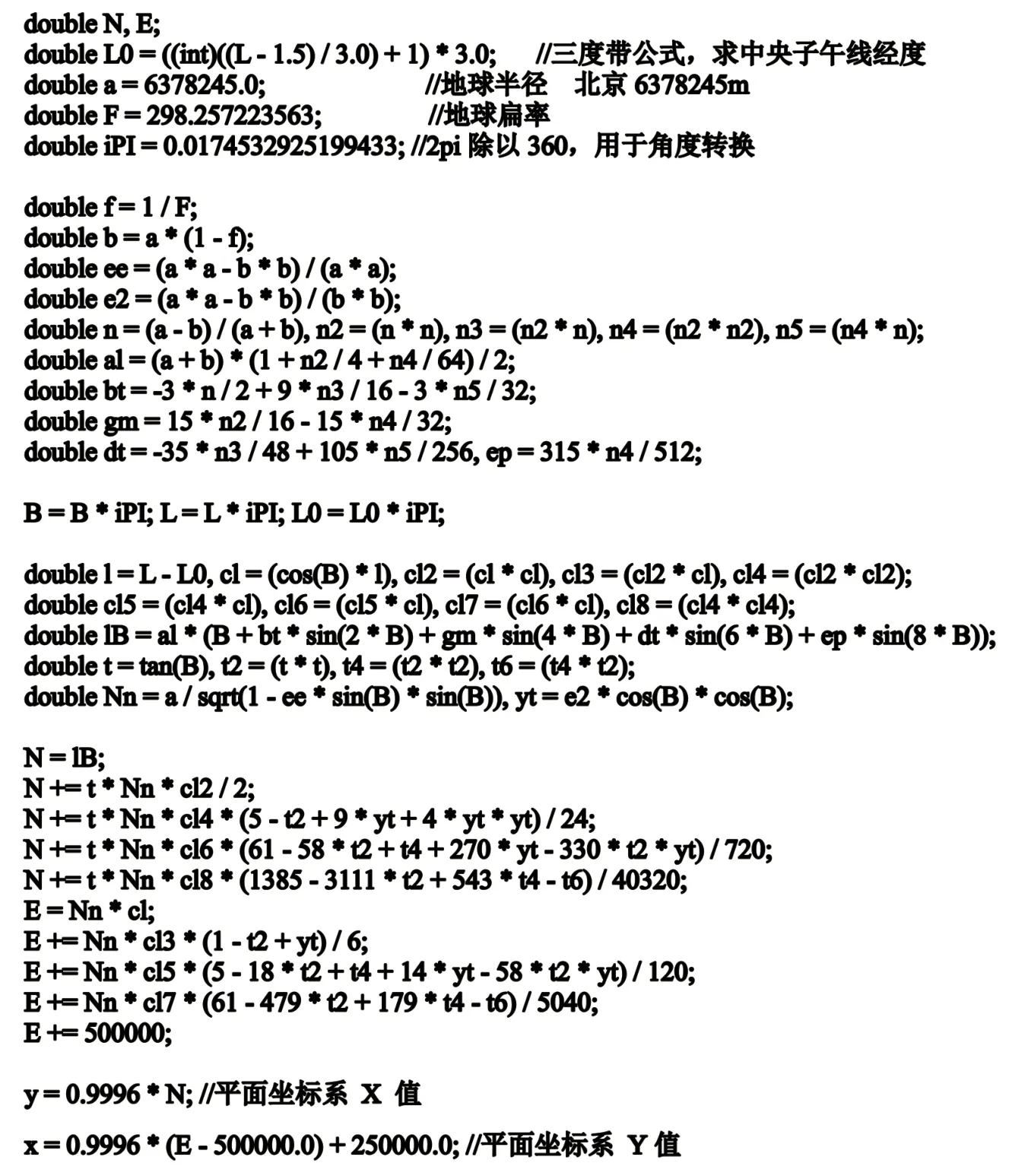
圖3 根據(jù)坐標(biāo)系轉(zhuǎn)換公式編寫代碼
(二)軌跡數(shù)據(jù)后處理
生成行駛軌跡時,由于各種因素(如有行人、障礙物在道路上)導(dǎo)致錄制的軌跡非理想狀態(tài),此時進(jìn)行適當(dāng)?shù)臄?shù)據(jù)處理使得錄制的參考軌跡更加合理、真實(shí)。
1.軌跡點(diǎn)等間距化
慣導(dǎo)系統(tǒng)輸出的行駛軌跡,本質(zhì)上為一連串的位置坐標(biāo)數(shù)據(jù),由于行駛過程中速度變化,導(dǎo)致采集的坐標(biāo)數(shù)據(jù)間距不均勻,甚至某一位置存在大量的數(shù)據(jù),不僅數(shù)據(jù)量多,且在自動駕駛時匹配參考軌跡點(diǎn)時不易匹配。因此將錄制的軌跡數(shù)據(jù)進(jìn)行等間距化處理,使軌跡點(diǎn)間距相等,得到更加均勻分布的軌跡數(shù)據(jù),有利于為自動駕駛系統(tǒng)提供更好的參考軌跡。
2.彎道曲線擬合
慣導(dǎo)系統(tǒng)在采集車輛位置數(shù)據(jù),以及后續(xù)生成的路徑軌跡中,車輛在直角轉(zhuǎn)彎等轉(zhuǎn)彎半徑較小的情況下,存在行駛軌跡不平滑的問題,導(dǎo)致自動駕駛系統(tǒng)匹配參考軌跡時易偏離。因此需要對轉(zhuǎn)彎半徑較小的軌跡數(shù)據(jù)進(jìn)行曲線擬合(如多項(xiàng)式擬合),擬合為平滑的圓弧,降低參考軌跡匹配偏移,提升行駛平穩(wěn)性。
(三)測試與結(jié)果分析
1.測試方案
本文的實(shí)車測試在漢騰汽車技術(shù)研究院的園區(qū)內(nèi)進(jìn)行的,該測試場地空曠,大部分區(qū)域衛(wèi)星信號較好,能保證GPS/IMU 系統(tǒng)具備良好的定位準(zhǔn)確性,在測試中,慣導(dǎo)系統(tǒng)的主機(jī)安裝于車輛后軸中心處,通過串口與工控機(jī)連接實(shí)現(xiàn)通訊。
2.測試結(jié)果分析
為驗(yàn)證慣導(dǎo)系統(tǒng)定位的精準(zhǔn)性及基于ROS 生成實(shí)時行駛軌跡,智能汽車按照規(guī)劃的路線行駛,可在RVIZ 界面觀察到車輛位置以及行駛的軌跡,并將采集的數(shù)據(jù)進(jìn)行后處理。經(jīng)對比可發(fā)現(xiàn):經(jīng)處理后的數(shù)據(jù)所生成軌跡,數(shù)據(jù)量極大的壓縮,定位點(diǎn)間隔基本一致,且在彎道處的軌跡平滑,可以較合理地反映車輛的行駛軌跡,并作為自動駕駛車輛的參考行駛路徑。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
