基于RobotStudio的焊接機器人視覺效果仿真研究
2020-12-02 07:48:07陳磊郭金妹羅國虎
科技創新與應用 2020年34期
關鍵詞:仿真
陳磊 郭金妹 羅國虎

摘? 要:文章提出了一種產生焊接視覺效果的設計方法,并以T型焊接工作站為研究對象,借助RobotStudio軟件進行仿真。首先進行了工作站總體方案設計及布局;其次完成了仿真方案設計,創建了焊槍組件及設計了工作站邏輯。最后完成程序編制和仿真分析。仿真的結果表明:焊接工作站可以實現焊接過程的視覺效果。
關鍵詞:焊接機器人;視覺效果;仿真
中圖分類號:TP249? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)34-0024-03
Abstract: This paper presents a design method to produce welding visual effect, and takes T-type welding workstation as the research object, and simulates it with the help of RobotStudio software. Firstly, the overall design and layout of the workstation are carried out; secondly, the simulation design is completed, the welding gun components are created and the workstation logic is designed. Finally, the programming and simulation analysis are completed. The simulation results show that the welding workstation can achieve the visual effect of the welding process.
Keywords: welding robot; visual effect; simulation
引言
制造業是我國經濟發展的支柱產業,隨著制造業水平的不斷發展,工業機器人被廣泛應用于搬運、碼垛、焊接和涂裝等行業。由于焊接加工存在生產條件差、危險系數高、勞動強度大等因素,焊接機器人的應用最為廣泛[1]。通過焊接機器人來完成特定的工作,能夠提高生產效率,同時當不同產品需要焊接時,只需對機器人焊接程序進行編寫,即可達到柔性化的生產需求[2]。
工業機器人借助仿真技術,可以在工業生產線使用之前事先模擬,在仿真模型中導入工業機器人和工作場景,并在仿真軟件中對機器人進行軌跡規劃和程序編寫,從而合理配置生產線,降低企業投資成本,縮短工期,提高生產效率,亦可降低焊接過程中的人工風險,保障工人的生命安全[3]。
1 研究現狀
武漢理工大學章銳等人基于自定義填充策略,計算各個目標點的偏移量,利用MotoSimEG-VRC離線編程軟件進行仿真,然后將程序導入到真實機器人中,驗證了方案的可行性[4]。山東理工大學孫增光等人對焊接機器人工作站進行了SolidWork建模和RobotStudio仿真搭建,根據實際情況研究短路過渡的焊接方法,創建了碰撞監控[5]。李怡林利用RobotStudio搭建機器人搬運、焊接于一體的雙機協作工作站,完成了工作站的離線編程與仿真優化,為雙機協作的生產線設計提供可行性參考[6]。但這些文獻都沒有涉及焊接過程中的電弧光和焊接后的視覺效果。
2 研究內容及總體設計
2.1 研究內容
本項目采用ABB虛擬仿真軟件RobotStudio平臺,以T型接頭為研究對象,搭建與生產實際類型的研究平臺,選擇系統中的單臺焊接機器人,然后對焊接工件進行焊接。由于RobotStudio具有強大且逼真的仿真能力,仿真平臺中的效果幾乎可以與實際生產一致。其次,利用軟件的Smart組件功能,進行組件設計,可以觀察工作單元的信號狀態。最后進行RAPID語言進行程序的編寫,該語言與C語言類似,可以方便的編寫需要的程序,具體來說其研究的主要內容為:
(1)利用SolidWorks設計熔池三維仿真模型。
(2)根據研究對象布局機器人以及T型接頭。
(3)創建Smart組件、仿真I/O信號等等。
(4)編制RAPID離線仿真程序。
(5)調整焊接的時間間隔,對比仿真結果,實現焊接過程的視覺效果的可行性。
2.2 總體設計
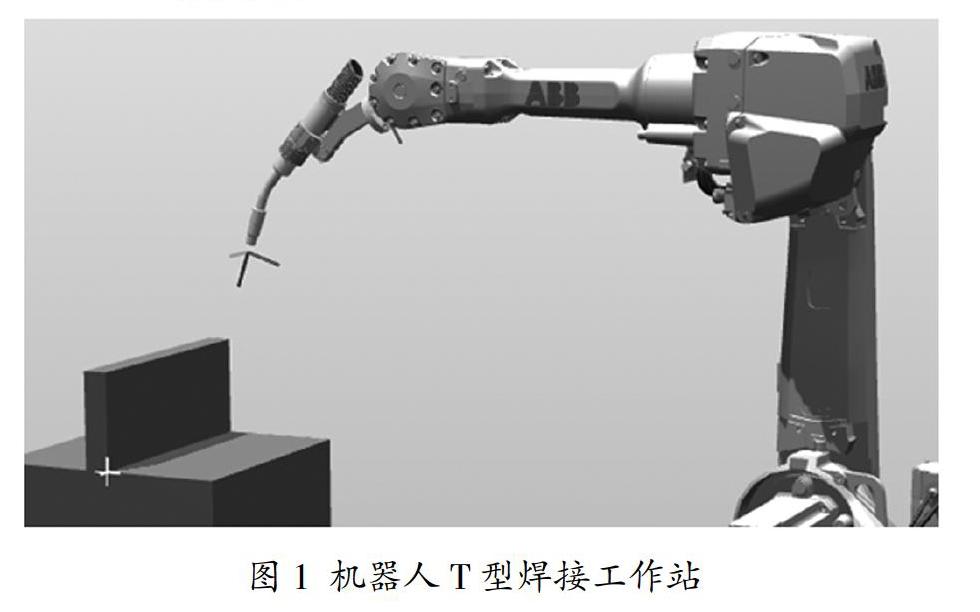
機器人T焊接工作站主要由焊接機器人和T型接頭組成,焊接機器人選用IRB2600,這是工廠里常有的焊接機器人。利用SolidWorks軟件制作橢球體,表示熔池,轉換為.SAT格式后導入到RobotStudio仿真工作站中[7],同時T型接頭的布局要在機器人可焊接的范圍內,可以利用軟件中的顯示工作空間功能,該功能可以顯示2D輪廓和3D體積,避免加工件超過機器人的工作范圍,最終機器人T型焊接工作站如圖1所示。本項目進行一個簡單的焊接任務,焊接機器人只需完成一條直線的焊接任務,焊接開始有電弧光并且形成熔池,最終形成一條連續的焊縫。
3 仿真系統設計
3.1 Smart組件設計
采用RobotStudio中的Smart組件可創建動態視覺效果[8],焊接工作站的視覺效果為焊槍組件SC_HanQiang,模擬真實焊接過程中產生的電弧光和焊縫。焊槍組件SC_HanQiang件包含Source子組件、Timer子組件、PositionSensor子組件、LightControl子組件四部分,完成的功能為:機器人從原點處移動到焊接起始點,當機器人到達焊接起始點Source子組件產生熔池,熔池產生的間隔時間由Timer 子組件控制,熔池的位置和朝向由PositionSensor子組件確定,同時LightControl子組件產生電弧光,焊接結束后,Source子組件關閉熔池,LightControl子組件關閉電弧光。電弧光的創建在RobotStudio圖形工具中,需要事先創建點光且打開高級照明。PositionSensor子組件屬性中的Position和Orientation要分別賦予Source子組件屬性中的Position和Orientation,這樣才能保證熔池產生的位置在焊接處。這四個子組件的具體屬性設置和功能如表1。
焊槍組件中的Smart設計邏輯如圖2所示,該組件的動態仿真模擬了真實焊接的視覺效果。其中I/O信號用于連接各個組件之間的關系,Di_Guang作為焊槍組件的輸入信號,模擬PLC的通信過程,控制LightControl子組件和Timer子組件的激活狀態,Timer子組件的Output控制Source子組件的激活。
3.2 工作站邏輯設計
本文焊接工作站系統設計只需定義一個數字輸出信號do_Guangyuan0,該信號用來控制焊槍組件SC_HanQiang數字量輸入信號di_Guang。當焊槍到達焊接起始點,可使 do_Guangyuan0信號置1,那么焊槍組建接收到置1信號,就產生電弧光和熔體這樣的視覺效果,工作站邏輯關系如圖3所示。
4 系統編程與仿真
4.1 程序編制
本項目是完成T型焊接的工作任務只需完成一條直線的焊接軌跡,需要強調的是在程序結尾加了一個10秒的延時時間,用于觀察焊接的軌跡是否正確。T型焊接焊接工作站的主要程序如下[9]:
PROC Path_10()
MoveL Target_10,v80,fine,tWeldGun\WObj:=wobj0; !機器人原點
MoveL Target_20,v80,fine,tWeldGun\WObj:=wobj0; !焊接起始點
SetDO do_Guangyuan0,1; !打開信號
MoveL Target_30,v80,fine,tWeldGun\WObj:=wobj0; !焊接終止點
SetDO do_Guangyuan0,0; !關閉信號
MoveL Target_10,v80,fine,tWeldGun\WObj:=wobj0; !回到機器人原點
WaitTime 10; !等待10秒,用于觀察焊接效果
ENDPROC
4.2 仿真分析
仿真結束后,可觀察焊接的效果,本文影響焊接的效果有焊接速度,即機器人運動的速度,Source子組件中熔池拷貝的時間間隔。當速度為V80mm/s時,Timer子組件控制熔池拷貝時間間隔為0.05s時,最后生成的效果如圖4(a)所示。如果速度保持不變,時間間隔增加到0.2s時,效果如圖4(b)所示。可根據實際焊接效果,動態調整虛擬仿真軟件中焊接速度和時間間隔。
4.3 碰撞檢測
工業機器人在焊接過程中,由于焊槍與工件的距離如果太近就容易出現碰撞,如果距離太遠,則會出現電弧不穩定,出現氣孔等焊接缺陷,因此焊槍和工件要保持在一個所規定的范圍之內,而RobotStudio仿真過程中可以設置碰撞模塊,在程序的執行過程中監控焊槍是否與焊接對象或者周邊設備會發生碰撞[10]。在碰撞檢測分析時,自行設定接近丟失的距離,比如3毫米,如果焊接機器在焊接的過程中,工具與工件距離小于3毫米,則顯示接近丟失的顏色,反之不顯示。如果發生碰撞,則顯示碰撞顏色,碰撞顏色和接近丟失的顏色可以自行設定,比如碰撞顏色為紅色,接近丟失顏色為黃色。另外還可通過軌跡跟蹤功能查看仿真路徑是否與焊縫位置一致,如果不一致,需要重新示教焊接點的位置。
5 結束語
本文通過搭建T型焊接工作站,主要涉及動態Smart組件的設計、工作站邏輯設計,機器人離線編程等內容。該方案設計了焊接過程中的視角效果,模擬了真實的焊接工作環境,通過仿真觀察焊接效果,并進行人工修正,對指導實際生產具有重要的指導意義。但是本文并沒有具體研究焊槍與工件之間的距離,這需要與實際生產對接,其次焊接表面壓力、焊接時間以及熔融量,這部分也需要進一步探討。
參考文獻:
[1]杜望,張曉旭.機器人焊接工作站在汽車起重機卷揚箱焊接中的應用[J].電焊機,2009(5):183-185.
[2]孟國強,杜望.機器人焊接工作站在推土機后橋箱焊接中的應用[J].電焊機,2009(5):186-188.
[3]夏生健.工業機器人焊接生產線的設計及研究[D].南京:東南大學,2016.
[4]章銳,汪選國,劉偉,等.基于自定義填充策略的機器人中厚板多層多道焊離線編程與仿真[J].焊接技術,2019(12):69-73.
[5]孫增光,王士軍,孟令軍,等.基于RobotStudio焊接機器人工作站仿真設計[J].機床與液壓,2020(5):29-33.
[6]李怡林.基于RobotStudio的雙機協同工作站仿真設計[J].河南科技,2019(25):14-18.
[7]陳磊,王健,郭金妹.基于汽車水箱的機器人焊接工作站的設計與仿真[J].電子世界,2020(2):124-125+128.
[8]郝翠霞,葉暉.基于Smart組件的工業機器人碼垛仿真設計[J].機床與液壓,2018(8):63-66.
[9]葉暉.工業機器人應用虛擬仿真教程[M].北京:機械工業出版社,2014.
[10]郝建豹,許煥彬,林炯南.基于RobotStudio的多機器人生產線仿真設計[J].組合機床與自動化加工技術,2017(11):122-125.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49