基于多STM32和CAN總線的分布式控制電動護理床設計
2020-12-08 03:15:22吳迪,趙琢,陳逢
計算機測量與控制 2020年11期
關鍵詞:設計
吳 迪,趙 琢,陳 逢
(威海威高醫療影像科技有限公司 研發中心,山東 威海 264210)
0 引言
隨著社會老齡化的加劇和精細化醫療的實施,對護理床的需求日益增加[1-2]。在新技術快速發展和跨領域廣泛應用的背景下,護理床的發展有如下幾個趨勢:1)電動護理床逐步取代傳統的手動護理床;2)電動護理床由支持簡單動作向支持多功能組合動作演變;3)智能化、模塊化、標準化的設計[3-4]。目前,多功能電動護理床的控制系統設計,大多數采用單一控制器方式,這種方式的優點是設計簡單,缺點是受主控芯片功能、性能和端口數量的限制,無法實施更多、更復雜的功能應用。此外,由于護理床外形尺寸較大,各個電動執行機構和傳感器裝置分散在床體各處[5],對于單一控制器的方式而言,所有信號連接線都要匯總到控制板,因此走線錯綜復雜,信號干擾嚴重,不利于系統的穩定性和工藝實施。
鑒于以上,本設計采用分布式控制方式,將護理床控制系統的各個功能扁平化、模塊化。控制系統由運動控制板、檢測控制板、手操作控制板、腳踏控制板、左側顯示屏和右側顯示屏構成。各個控制單元均采用STM32作為主控芯片,各個控制單元之間采用CAN總線通信。
與現有方式相比,本設計將各個控制單元分散布置在床體各處,便于與電動執行機構和傳感器裝置就近連接,各類信號能夠就近傳輸和處理,縮短敏感信號的傳輸距離。各個控制單元各司其職,減小了主控芯片的負擔,系統負荷均衡,整體性能得到提升。各個控制單元之間通過CAN總線通信,抗干擾能力強、仲裁容錯能力強[6],提高了床體的系統穩定性。此外,由于CAN總線拓撲結構的特點[7],方便后續增加新的功能單元節點。
1 系統結構及原理
系統由多個控制單元與CAN總線組成,各個控制單元分散布置在床體各處。其中,運動控制板和檢測控制板位于床體中部,腳踏控制板位于床體底部,手操作控制板位于床旁,左側顯示屏和右側顯示屏分別位于床頭護欄的左、右兩側。各個控制單元通過CAN總線連接。系統框圖如圖1所示。每個控制單元均由STM32作為主控芯片,應用其豐富的接口完成相應控制和處理功能;STM32內置有CAN控制器,與CAN隔離收發器通信。CAN隔離收發器在CAN總線上發送或接收數據,實現與其他控制單元之間的通信。
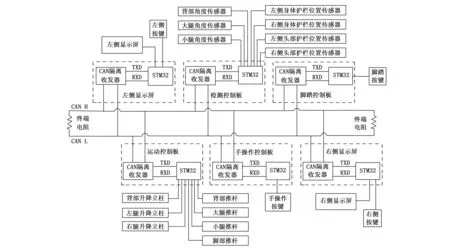
圖1 系統框圖
運動控制板用于控制床體的電動執行機構,由STM32的IO口控制3個電動升降立柱和4個電動推桿。3個電動升降立柱分別位于床架的背部、左腿部、右腿部,其組合動作可以實現床體的前后傾斜、左右傾斜等功能。例如左、右腿部的立柱同時降低,背部立柱升高,可以實現床體向前傾斜功能;背部立柱保持不動,左腿部立柱下降,右腿部立柱上升,可以實現床體的向左傾斜功能。4個電動推桿分別位于背部、大腿部、小腿部和腳部。STM32控制推桿的伸出或縮回,帶動機械機構,可以實現床體的背部升降、大腿升降、小腿彎曲、腳部伸縮等功能。
檢測控制板用于檢測各個傳感器的狀態,包括位于背部、大腿和小腿的角度傳感器;位于左、右側身體護欄和頭部護欄的位置傳感器。STM32讀取各個傳感器的狀態,實現床體姿態識別功能。
手操作控制板和腳踏控制板布置有多個按鍵,用于輸入各種床體動作命令。
左、右兩側顯示屏分別位于左、右兩側床頭護欄內。顯示屏作為顯示和控制的集中單元,用于顯示當前床體狀態,且設計有按鍵用于輸入床體控制命令。通過CAN總線與檢測控制板通信,獲取床體姿態數據用于顯示;與運動控制板通信,執行相應動作。
2 硬件設計
主要設計參數有:
1)高度值模數轉換器(ADC)精度:12位;
2)角度值測量誤差:1°;
3)電動執行機構驅動電壓:24 V;
4)通信方式:CAN 2.0B協議。
本設計中的運動控制板、檢測控制板和左、右兩側顯示屏的主控芯片選用STM32F405VG,它是以ARM Cortex-M4為內核的32位單片機,工作頻率高達168 MHz。內置1 MB閃存和192+4 KB的SRAM,包含82路GPIO,2路CAN接口,具有支持8080/6800格式液晶顯示屏(LCD)驅動的可變靜態存儲控制器(FSMC)接口,16通道12位ADC等[8-9]。處理能力強,運行速度快,接口豐富,適合高性能的嵌入式系統設計。本設計中的手操作控制板和腳踏控制板功能相對單一,考慮到成本因素,主控芯片選擇STM32F405RG,其GPIO有51路,無FSMC接口,其他性能不變,可以滿足實際需求。
CAN收發器采用CTM1051高速隔離收發模塊,其端口與CAN控制器、CAN總線連接,無需外加器件即可直接使用。支持CAN 2.0A和2.0B,每個CAN網絡最多可接入110個收發模塊,最長通信距離1 km,支持最低波特率40 kbps。滿足設計需求,并為后續功能單元的拓展提供了可能性。
2.1 運動控制板設計
運動控制板用于接收控制命令,驅動3個電動升降立柱和4個電動推桿按照特定方式動作。電動升降立柱和電動推桿都是由直流電機和機械執行機構組成的,所以對它們的控制實質上就是對直流電機的控制。控制升降立柱和推桿的運動方向和運動速度,實質是控制電機的轉動方向和轉速。電機的轉動方向由流經電機的電流方向決定,一個簡單的控制方法是通過繼電器實現。電機的轉速用脈寬調制(PWM)調節實現。主控芯片STM32控制其中一路電動升降立柱的電路圖如圖2所示。
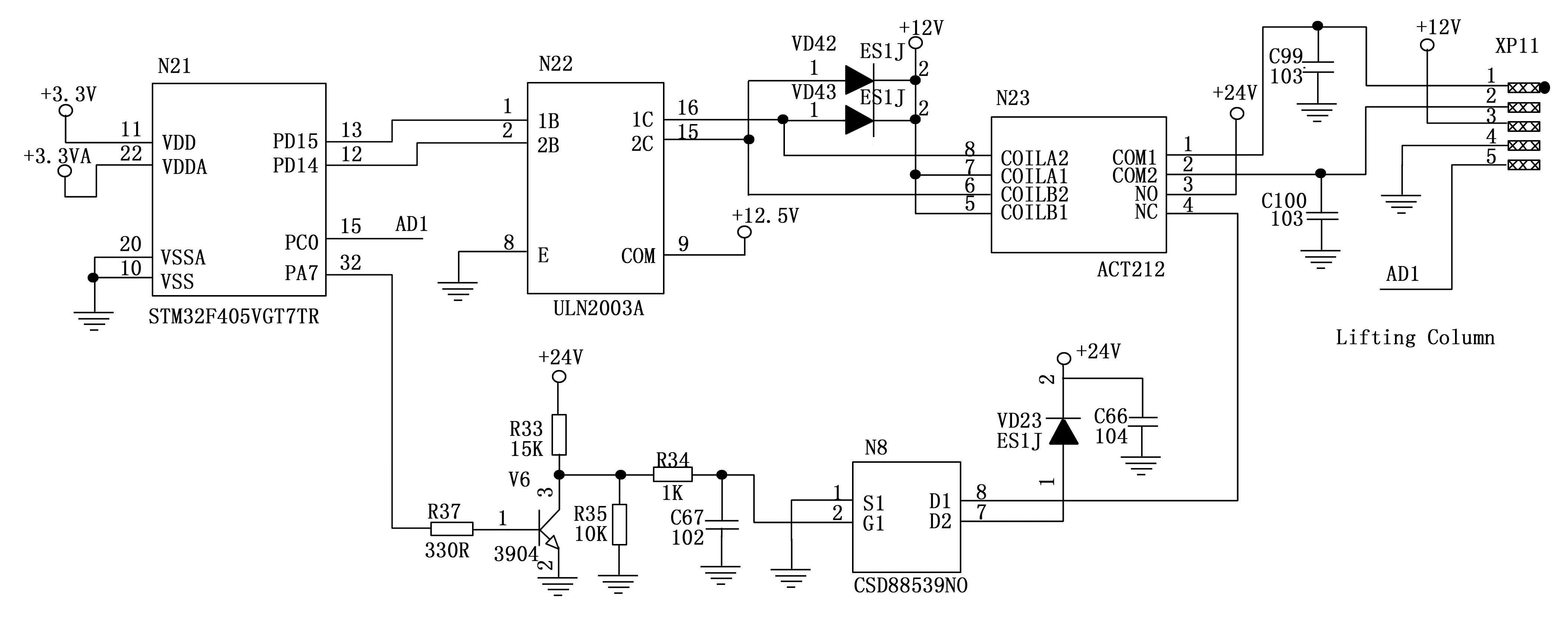
圖2 電動升降立柱控制電路圖
選用的松下ACT212繼電器,線圈由12 V電壓驅動,載流可達25 A,其內部電路如圖3所示。其常開觸點(N.O.)接24 V電壓,常閉觸點(N.C.)接PWM調制的24 V電壓。公共端COM 1和COM 2分別接直流電機的2個輸入端。2個閘刀分別由2個線圈COIL A和COIL B控制。當N.O.為24 V,N.C.為PWM的低電平0 V時,N.O.與N.C.之間有24 V電壓,即COM 1與COM 2之間有24 V電壓,也即電動升降立柱的2個輸入端之間有24 V電壓,電動升降立柱開始運動;當N.O.為24 V,N.C.為PWM的高電平24 V時,N.O.與N.C.之間無電壓,電動升降立柱停止運動。若通過COIL A和COIL B改變閘刀的位置,可以改變流經COM 1與COM 2的電流方向,即控制電動升降立柱的運動方向是升高還是降低。
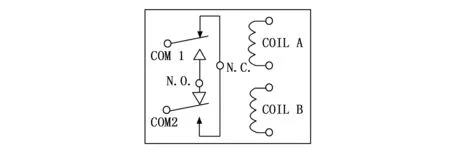
圖3 ACT212繼電器電路圖
STM32的PA7 Timer1配置為PWM輸出,信號幅值為3.3 V,若要實現對24 V的PWM調制,需要用場效應(MOS)管控制。設計采用的MOS管CSD88539ND,雙N溝道,漏源極耐壓為60 V,支持連續漏極電流可達15 A,柵源極閾值電壓3 V,適合于電機控制。PA7輸出的PWM通過一級三極管反向,變換為幅值為24 V的反向PWM,接入MOS管CSD88539ND的柵極,其源極接地。通過PWM控制柵源極之間24 V電壓的有無,實現對漏極的導通控制,即上文所述繼電器常閉觸點N.C.的PWM控制。通過設置PA7輸出PWM的占空比,即可改變電動升降立柱的運動速度。為了避免電機啟動時產生的瞬間大電流,將STM32輸出的PWM信號設置為變占空比的方式,使電機變速啟動。
STM32的GPIO端口PD14、PD15用于控制電動升降立柱的運動方向。因GPIO電流驅動能力不足以直接驅動繼電器線圈,利用達林頓管ULN2003A提高其電流驅動能力。ULN2003A的COM端接12.5 V電壓,實現STM32的GPIO 3.3 V邏輯電平控制12.5 V電壓,以此推動繼電器線圈COIL A和COIL B。當繼電器線圈中有電流流過時,其對應的閘刀吸合。通過改變閘刀的位置,可以控制流經直流電機的電流方向,從而達到控制升降立柱運動方向的目的。
因為電機是感性負載,控制其啟動、停止和反向時,會有感應電流產生。為了及時釋放感應電流,使用快恢復二極管ES1J作為釋放二極管,構成電流釋放通路,保證系統穩定。
電動升降立柱的高度數據,通過模擬量輸出,用STM32 的PC0采集,進行12位的A/D轉換。
STM32控制電動推桿的設計與此類似,但不需要采集推桿伸出長度數據。推桿自帶限位裝置,伸出或縮回到極限位置時自動停止。
2.2 檢測控制板設計
檢測控制板用于實時讀取各個角度傳感器的數據,和各個位置傳感器的狀態,以識別床體當前姿態。其中一路角度傳感器和一路位置傳感器的電路圖如圖4所示。
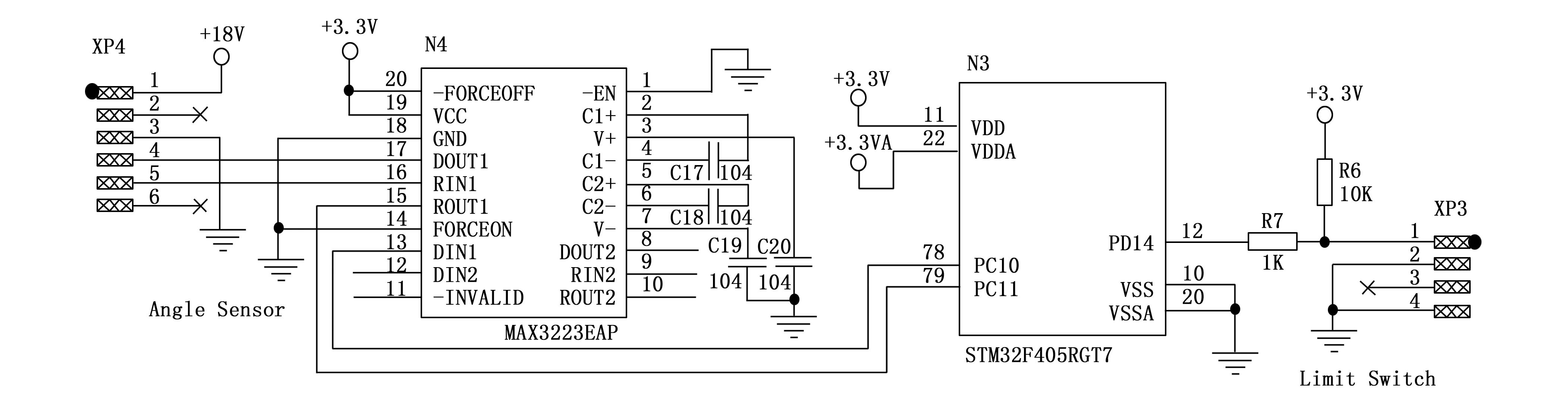
圖4 角度傳感器和位置傳感器電路圖
采用單軸角度傳感器AYC-360,分辨率為0.1 °,精度為0.5 °,將其垂直于水平面安裝在床架上。當床面呈水平時,STM32讀取并設置其輸出角度為0,當床體動作時,傳感器實時輸出當前角度值。輸出采用RS-232通信協議,波特率設置為9 600 bps。STM32的USART接口是TTL電平,需要使用RS-232收發芯片進行轉換。設計選取MAX3223芯片,其RS232端連接角度傳感器,TTL端連接STM32的USART3接口PC10和PC11,實現對當前角度數據的讀取。
位置傳感器采用微動式行程限位開關,床體護欄關閉時開關壓緊閉合,開關兩端接地,STM32的PD14為低電平。護欄打開時開關釋放,PD14由電阻上拉到3.3 V,輸入為高電平。以此判斷床體護欄的狀態。
2.3 手操作控制板和腳踏控制板設計
手操作控制板和腳踏控制板用于發送各種動作命令。手操作控制板布置在床旁,有較多按鍵;腳踏控制板布置在床體底部,通過踏板的方式操作。主要按鍵包括床體向前、后、左、右傾斜、床體升高、床體降低、背部升降、大腿部升降、小腿部升降、腳部伸縮按鍵。還設計有快捷按鍵,用于將預設的組合動作一步執行到位,包括心肺復蘇模式、休克急救模式和座椅模式按鍵。
選用的STM32F405RG有足夠的GPIO口,因此按鍵識別采用GPIO直接控制。按鍵采用機械觸點式。沒有按鍵動作時,相應GPIO通過電阻上拉到3.3 V,為高電平;有按鍵動作時,相應GPIO下拉到地,為低電平,STM32據此識別出相應的按鍵。
2.4 顯示屏單元設計
顯示屏有2個,分別位于左、右兩側床頭護欄內。顯示屏主要用于顯示當前床體狀態,可以查看床體各部分的姿態數據,如圖5所示。且設計有按鍵用于輸入床體控制命令。
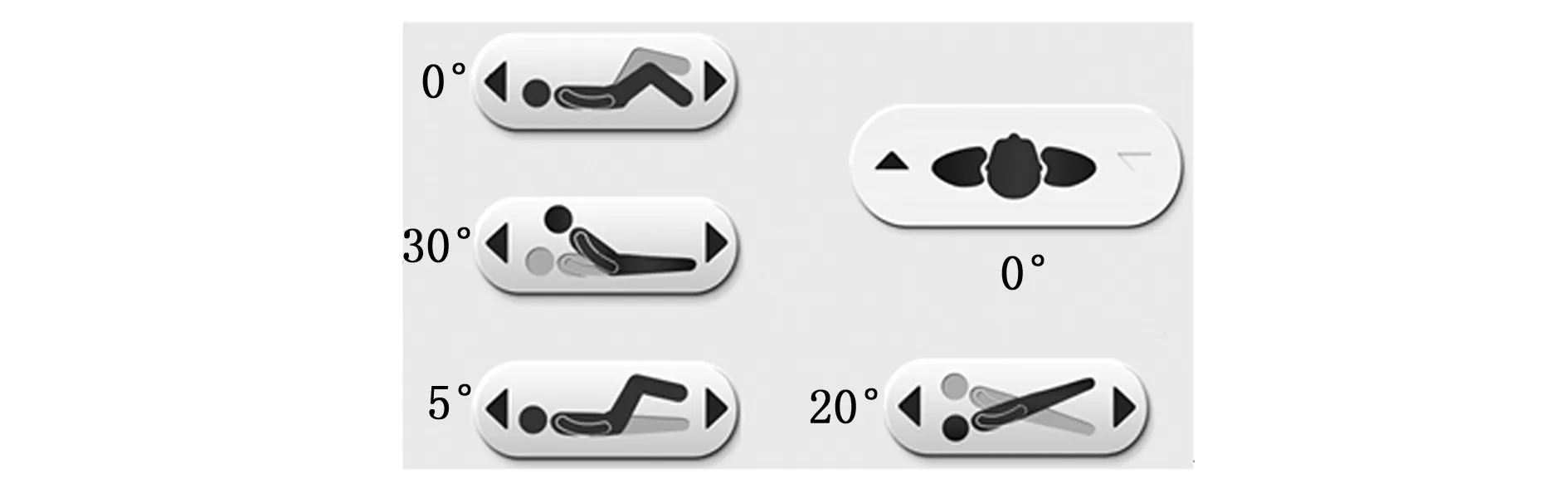
圖5 顯示屏
STM32對LCD驅動的控制通過FSMC來實現。STM32的FSMC可支持SRAM、NAND FLASH、NOR FLASH和PSRAM等存儲器,對LCD驅動的控制類似于對SRAM的控制方式。FSMC配置為LCD并行接口時可以支持大多數的LCD控制器[10],包括Intel 8080和Motorola 6800格式。
配置為LCD驅動接口的FSMC信號包括片選信號(CS)、寫信號(WR)、讀信號(RD)、復位信號(RST)、命令/數據標志(RS)、16位雙向數據線(DB[0-15])。STM32與顯示屏的接口電路如圖6所示。設計采用的LCD的驅動IC為ILI9488,將[IM2 IM1 IM0]配置為[0 1 0]可支持MCU16位并行模式。背光部分為6個LED,每個驅動電流為20 mA,顯示部分和背光部分均為3.3 V電壓供電。
通常,液晶屏上電初始化過程中會顯示亂碼。為了遮掩亂碼,需要增加對液晶屏背光時序的控制,當初始化完成、圖像正常顯示后,再打開背光。設計用MOS管AO3401作為背光的控制開關。STM32的PC3輸出高電平時,三極管3904導通,AO3401的源柵極產生電壓差,AO3401隨之導通,使得+3.3 V連通到+3.3 V_LCD,液晶屏背光電壓的3.3 V完成加載,背光打開。源柵極間并聯電容的充放電時間影響源柵極電壓的建立時間,調節其容值可以調節AO3401打開的速度。
2.5 CAN總線通信設計
CAN總線采用多主機工作方式和非破壞性仲裁總線技術,總線上任意節點可在任意時刻主動向網絡上其他節點發送信息而不分主次,各節點之間自由通信,通信方式靈活。當多個節點同時向總線發送信息時,優先級較低的節點會主動退出發送,而優先級較高的節點不受影響,從而有效節省了總線沖突仲裁時間,即使在網絡負載繁重的情況下,也不會出現網絡癱瘓的情況[11]。適用于對穩定性要求嚴苛的控制系統。
CAN節點通常采用CAN控制器加隔離和收發的架構方式。設計采用的STM32F405VG和STM32F405RG自帶2組基本擴展CAN(bx CAN)接口,其支持CAN協議2.0A和2.0B主動模式;波特率最高達1 Mbps;支持時間觸發通信功能。設計前端采用隔離和收發功能一體的高速隔離收發器CTM1051KT,實現CAN控制器的邏輯電平和CAN總線差分電平的轉換,具備3500 VDC隔離功能,并且未上電的節點不影響總線。各控制單元的CAN部分電路圖如圖7所示。CTM1051KT的CANH、CANL管腳連接到CAN總線;RXD、TXD管腳連接到STM32的CAN控制器管腳PA11和PA12。
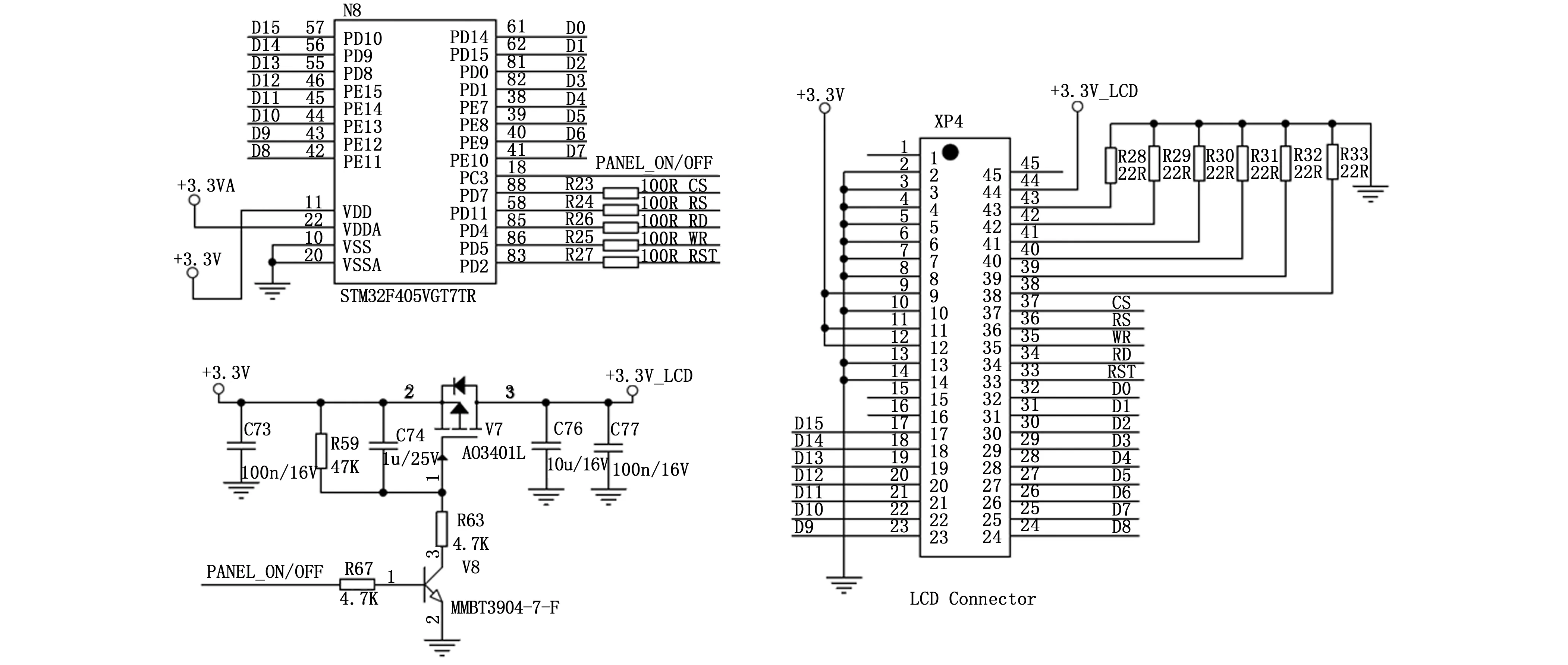
圖6 顯示屏接口電路圖
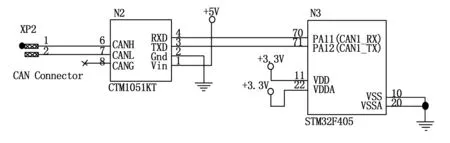
圖7 CAN節點電路圖
系統設計了6個CAN節點的布局,遠端采用終端電阻連接于CAN總線,即在左、右顯示屏端設計有120 Ω的終端電阻,其作用是與CAN總線電纜做阻抗匹配,減小信號反射,提高數據通信的抗干擾性。
3 軟件設計
3.1 系統軟件設計
系統上電初始化后,運動控制板檢測3個升降立柱的高度,并計算床體前后、左右傾斜的角度,完成床架姿態判斷,并通過CAN總線發送給屏端。檢測控制板檢測3個角度傳感器和4個位置傳感器的數值,完成床體姿態判斷,并通過CAN總線發送給屏端。屏端接收到數據后,在相應位置顯示。如果接收到來自手操作控制板、腳踏控制板或顯示屏按鍵的命令,則做相應動作。執行完后再次判斷床架、床體姿態。系統軟件流程圖如圖8所示。
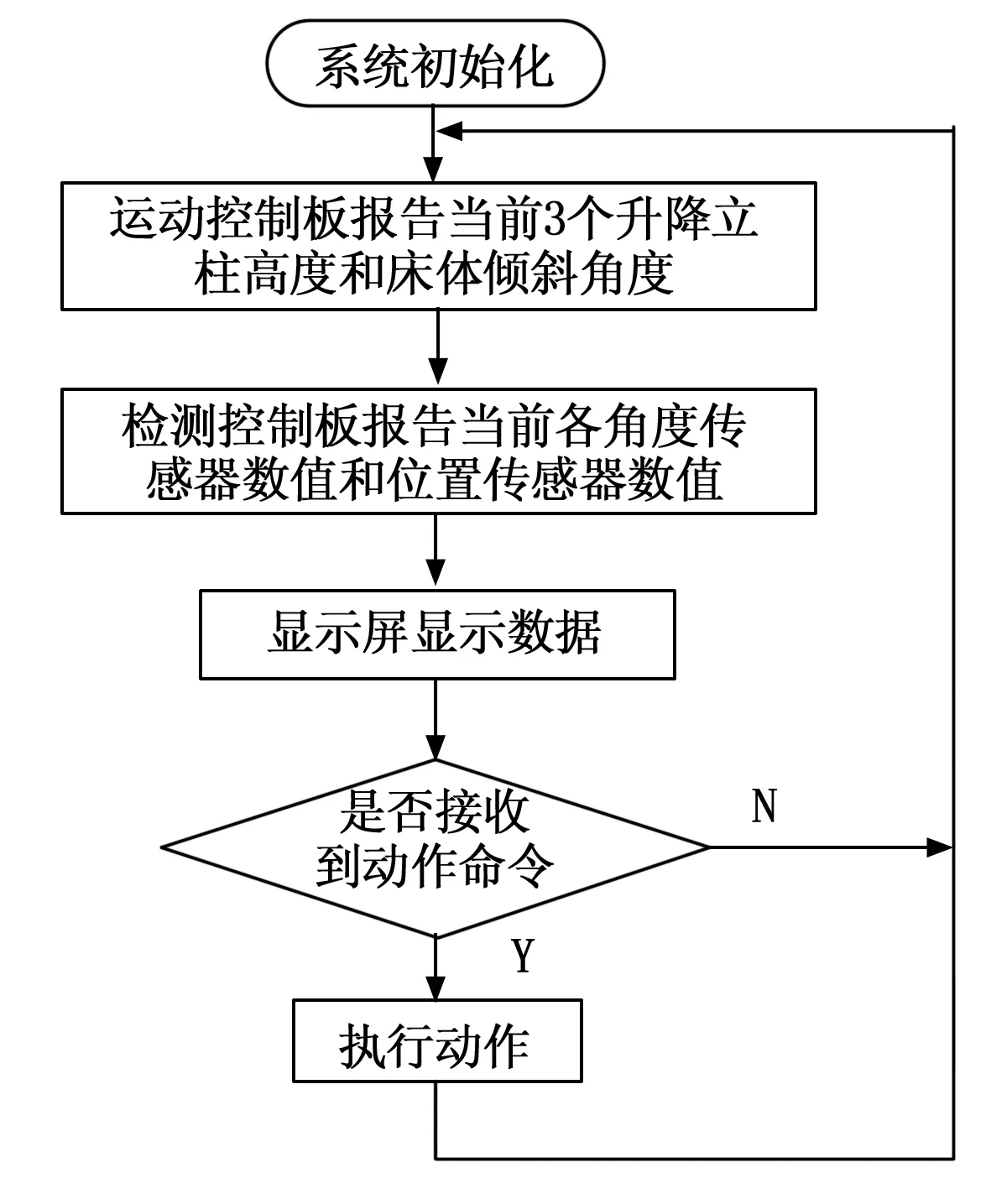
圖8 系統軟件流程圖
3.2 升降立柱控制軟件設計
系統上電初始化后,運動控制板檢測3個升降立柱的高度,利用反三角函數公式計算床體前后、左右傾斜的角度,并做角度變化值的比較。如果變化值大于1 °,則刷新數據;如果變化值小于1 °,不刷新數據。這樣設計目的是做軟件濾波,濾除機械運動誤差帶來的數據不穩定性。如果接收到動作命令,則做相應動作。執行完后返回。升降立柱控制流程圖如圖9所示。
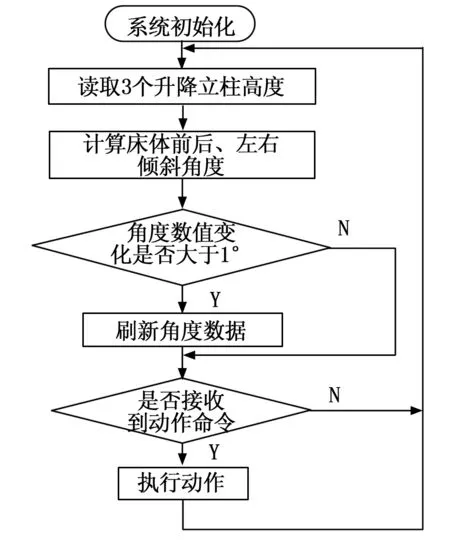
圖9 升降立柱控制流程圖
升降立柱在正常運動控制以外,還設計有保護機制,避免運動狀態混亂、達到床體機械極限、引起電機堵轉等風險。主要有如下幾個規則:
1)按下按鍵并保持,床體執行動作命令。松開按鍵,動作停止。同一時間只響應一個按鍵。
2)床體呈左、右方向傾斜的狀態下,按“前、后傾斜”按鍵,床體的3個升降立柱先恢復水平,再做前、后傾斜的動作。
3)床體呈前、后方向傾斜的狀態下,按“左、右傾斜”按鍵,床體的3個升降立柱先恢復水平,再做左、右傾斜的動作。
4)左、右傾斜動作分階段執行。即在水平面最低狀態下,按“左、右傾斜”按鍵,床體先左、右傾斜一定角度,然后停止左、右傾斜,3個升降立柱同時升高一定高度,然后再次做左、右傾斜,直至完成動作。這樣設計的目的是避免床體支架磕碰底架。
5)左、右傾斜角度不能超過30 °,避免床體機械損壞。
3.3 傳感器檢測軟件設計
系統上電初始化后,檢測控制板讀取位于床體背部、大腿、小腿位置的3個角度傳感器的數值,判斷角度變化值,做軟件濾波。如果變化值大于1 °,則刷新數據;如果變化值小于1 °,不刷新數據。讀取位于床體左、右兩側身體護欄和左、右兩側頭部護欄的4個位置傳感器的數值,判斷是否是1。如果是1,表示對應的護欄處于打開狀態,產生報警信號,并持續判斷位置傳感器數值,直到是0,表示護欄已關上,流程返回。傳感器檢測流程圖如圖10所示。
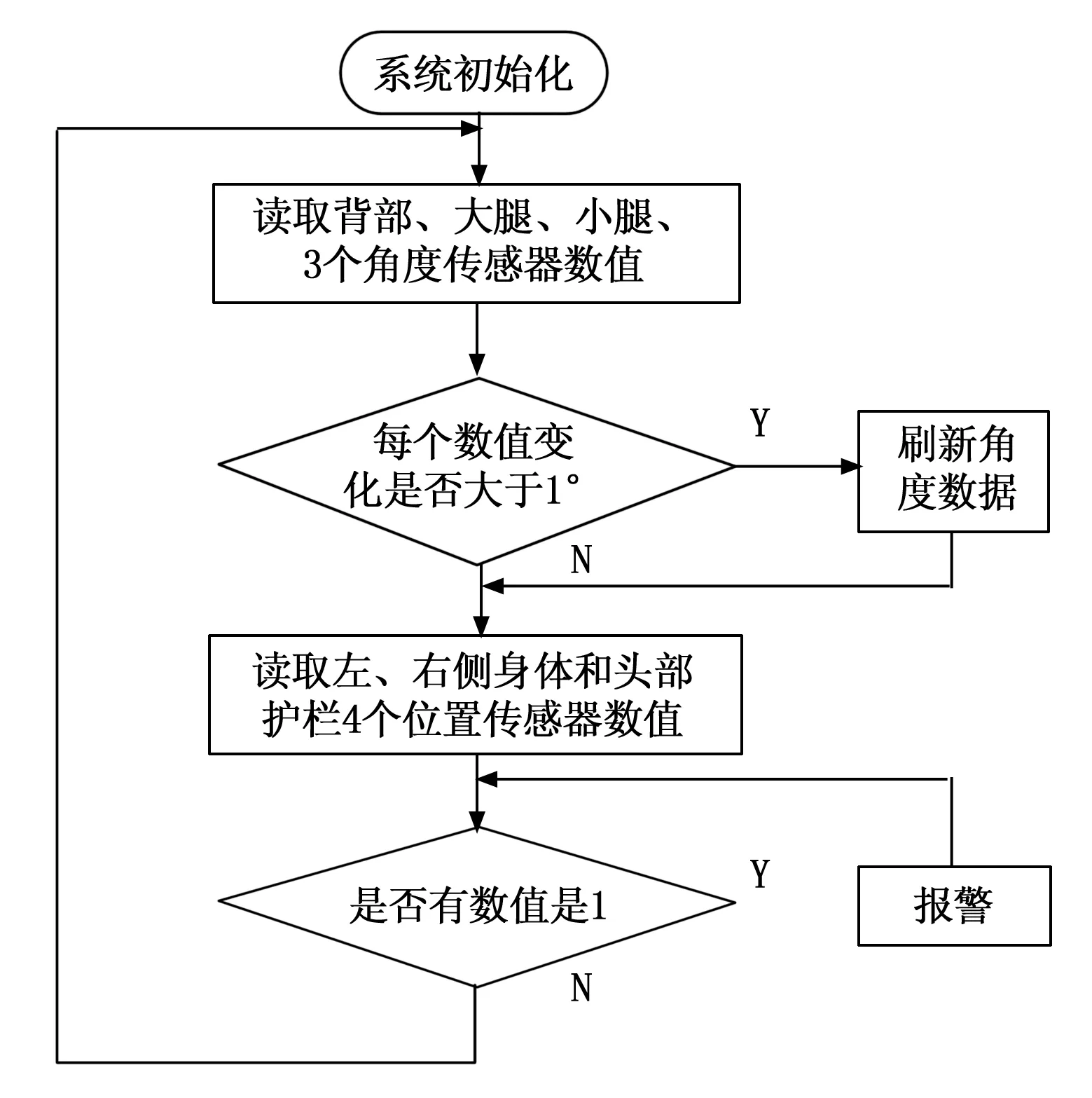
圖10 傳感器檢測流程圖
4 系統測試與分析
4.1 電動升降立柱啟動測試與分析
在電動升降立柱啟動時,用示波器測量STM32輸出PWM信號的占空比變化,測試波形如圖11所示。因有三極管反向作用,STM32輸出低電平時,電機轉動;高電平時,電機停止。由測試結果分析可知,起始占空比較大,并迅速減小,電機轉速逐漸增大,實現了電機變速啟動,避免了電機啟動瞬間的大電流影響,減輕了系統負荷。

圖11 電動升降立柱變速啟動波形
4.2 傾斜角度測試與分析
角度的測量分為兩類:1)床體的前、后傾斜和左、右傾斜的角度值,是STM32讀取電動升降立柱的高度數據,并通過反三角函數計算出的角度值,其精度與器件精度、A/D轉換精度、升降立柱的安裝一致性有關;2)背部、大腿和小腿的角度值,是角度傳感器直接輸出的角度值,其精度與器件精度、安裝位置有關。測試通過使用高精度角度儀,比較角度儀測出數據與護理床顯示屏顯示數據的差異。測量5次的數據如表1所示。由測試結果分析,前后、左右、背部、大腿、小腿傾角的最大誤差分別為0.6°、0.6°、0.3°、0.3°、0.2°,整體最大誤差為0.6°,小于1°,符合設計要求。其中,由電動升降立柱的高度計算出的角度數據誤差相對稍大,這方面可以在后續的工作中進一步改善。
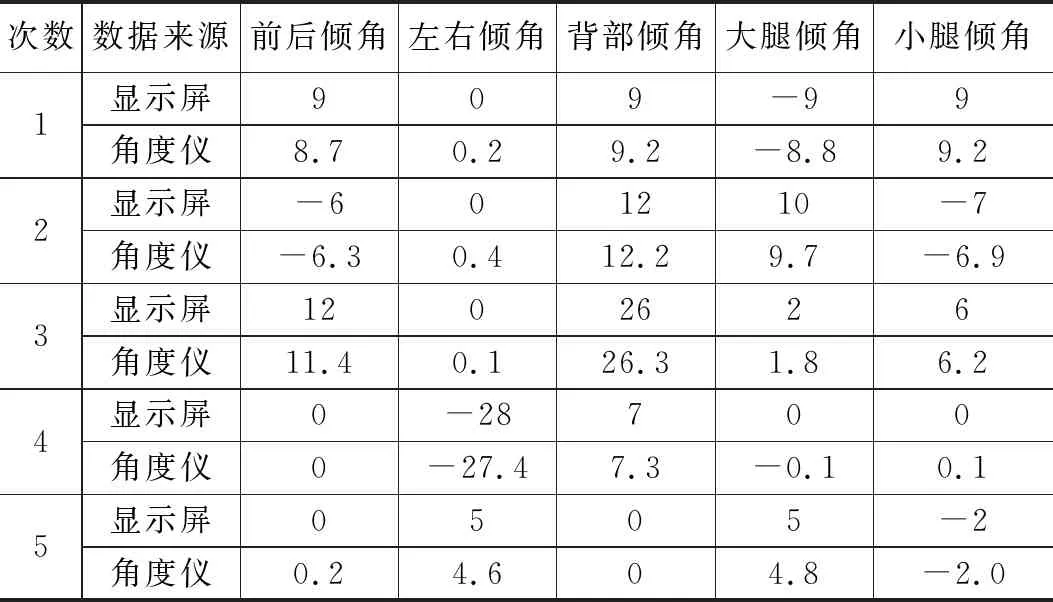
表1 角度測試結果 °
4.3 CAN總線測試與分析
CAN總線測試采用CANScope總線綜合分析儀,連接于CAN總線,獲取數據進行分析。CAN波形分析如圖12 所示。分析可見,CAN-H與CAN-L波形匹配、輸出無延遲,共模抑制效果良好[12];差分信號完整、邊沿無明顯振蕩;CAN數據邏輯清晰,符合規范。長時間持續測試表明,無明顯干擾,系統穩定性強。
4.4 綜合運動測試與分析
按照設計要求,對系統進行全面的功能、性能、穩定性
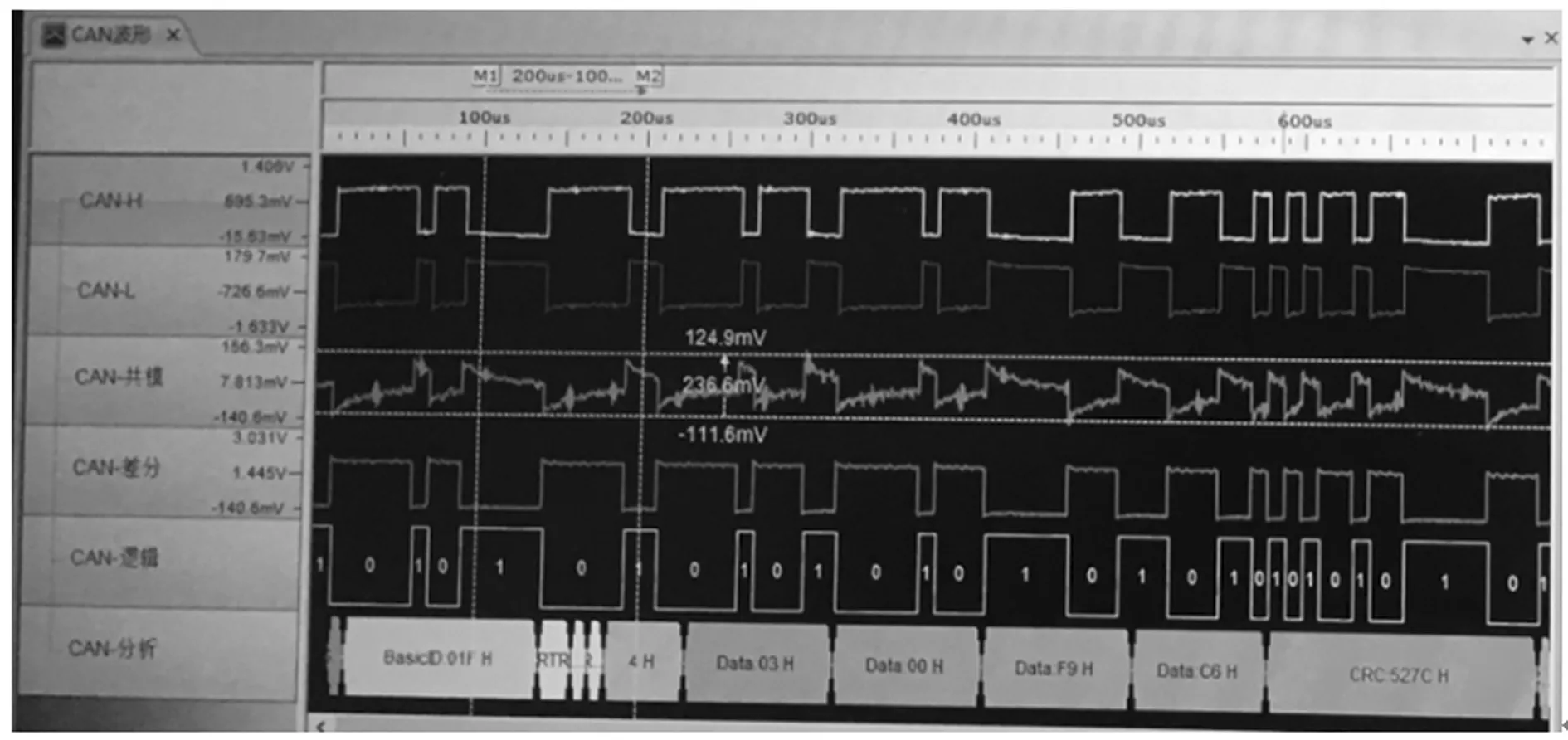
圖12 CAN波形分析
測試。各電動升降立柱和電動推桿的運動邏輯正確;各個預設動作能夠準確執行、動作到位。執行部件響應無明顯延遲、運動無過沖。保護機制有效執行,避免了運動狀態混亂、機械卡位和電機堵轉風險。位置傳感器反饋靈敏。顯示屏功能正常、時序正確,顯示信息同步。各個控制板按鍵輸入響應靈敏。由運動綜合測試的結果可知,系統整體設計較為完善,符合功能性和穩定性要求。
5 結束語
本設計基于分布式控制理念,采用多個基于STM32的控制單元,分別實現床體的運動、檢測、控制和顯示功能。控制單元之間采用CAN總線通信。設計將STM32強大的處理能力和CAN總線安全穩定的特點相結合,是電動護理床的一種新的技術應用形式。系統具有可靠性高、響應快、功能擴展性強等特點,同時也是一種技術平臺,為后續新功能的拓展和延伸打下了基礎,應用前景廣闊。基于多STM32和CAN總線的電動護理床后續還可以進一步改進和完善,比如在易用性方面,增加可記憶的用戶自定義姿態;在智能化方面,增加語音控制、語音或遙控助行;在物聯方面,增加遠程操控和數據傳輸等功能,以上均可基于此平臺開發。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
