基于RFID技術的智能安防閉鎖系統的設計與實現
2020-12-08 03:15:40陳志明程華明陸玉軍官國飛
計算機測量與控制 2020年11期
陳志明,李 澄,程華明,蔣 超,陸玉軍,官國飛
(江蘇方天電力技術有限公司,南京 211100)
0 引言
安防閉鎖系統中的閉鎖式保護是在安防設備出現異常時,能夠接收到故障保護信號,同時將系統閉鎖,以免發生意外事故。如果沒有接收對故障信息,則不執行跳閘操作[1]。安防設備中閉鎖系統的控制及工作狀況直接關系到電力系統的安全,與人民的生活利益密切相關。在常規的安防系統中,安防閉鎖系統整個工作過程涉及到的部門較多,工作量大,現有的人工數據傳遞、控制方式和管理方式已經不能適應安防閉鎖系統工作的需求,存在諸多技術弊端,諸如:安全工器具丟失、盜竊等無法溯源,智能化程度低,控制中心無法及時收到底層設備信息等[2]。
因此,針對上述技術的不足,提出了RFID (radio frequency identification,射頻識別)的技術的概念,采用了電子標簽識別方式,通過非接觸的方式,自動識別安防信息,從而智能化地獲取安防系統底層設備信息[3]。本研究將RFID技術、物聯網技術、人工智能技術、自動化控制技術等融合在一起,實現了智能安防閉鎖系統的智能化、自動化物聯工作。
1 整體系統設計
本研究的系統包括設備層、閉鎖硬件層、閉鎖工作層和管理層[4],其總體架構示意圖如圖1所示。與傳統技術中的安防閉鎖系統相比,本系統利用了RFID射頻識別式智能鎖,實現無接觸式智能控制。 本系統還利用物聯網技術,實現安防設備的遠程、在線、實時監控,克服了常規技術中現場監測的帶來的不便。

圖1 總體架構示意圖
在設備層中,設置了大量的安防設備,安防設備設置有智能閉鎖單元,智能閉鎖單元連接有閉鎖控制單元和 RFID 射頻智能鎖,通過閉鎖控制單元對 RFID 射頻智能鎖的控制,實現安防閉鎖單元的智能化、無接觸控制[5]。在設備層中,還包含了各種類型的 RFID 傳感器,每個 RFID 傳感器上的信息源具有一定的時效性,按照自身工作的頻率和周期,采集系統中的故障信息,不停地迭代計算從系統中獲取的故障數據信息。在閉鎖工作層中,還設置了支持 IEC 61850 通信協議的通訊模塊,該通訊模塊采用網絡組網方式為光纖和無線混合的聯網方式,通信協議為 IEC 61850 協議,通過利用這種方式,能夠將通訊系統組成環網,也可單獨接入到閉鎖硬件層的網絡結構中。通過上述通訊協議與互聯網進行數據通訊,及時、有效、準確地傳輸安防設備的信息[6]。
在閉鎖控制中,在電路中接入了RFID 射頻智能鎖,以實現故障數據的接收,這里用到了智能防誤裝置,該裝置連接有監控裝置,能夠實時監控智能防誤裝置的工作狀況,以實現遠程故障監控,做到及時防誤操作。在工作時,可以將 RFID 射頻智能鎖控制單元通過電氣通訊接口與智能閉鎖控制單元連接,以構成閉合回路,有利于用戶在遠程實現控制[7-8]。在配置RFID 射頻智能鎖時,也可以設置備份的手動設備,并對手動設備進行強制性閉鎖,可以通過 RFID 射頻智能鎖采集手動設備上的實時狀態,并將該狀態傳遞到智能防誤裝置的中,也可以通過IEC 61850 通信協議將實時狀態傳遞給上層管理系統,為閉鎖系統的實時邏輯判斷分析提供數據依據[9]。隨著無人值守智能安防監控技術的發展,智能安防閉鎖系統實現了高度智能化和自動化,下面對其關鍵技術進行說明。
2 RFID射頻智能鎖
2.1 硬件設計
在本研究中的 RFID 射頻智能鎖中,其設置有控制單元MSP430F14、射頻收發芯片 nRF905等元件,但 RFID 工作的核心是其由標簽、閱讀器、數據管理系統等部分組成,通過標簽能夠存儲大量的數據,具有較好的加密功能,在電磁工作環境中具有較好的抗干擾能力,無需直接接觸即可實現數據通訊[10]。在本研究中,其技術原理如圖2所示。
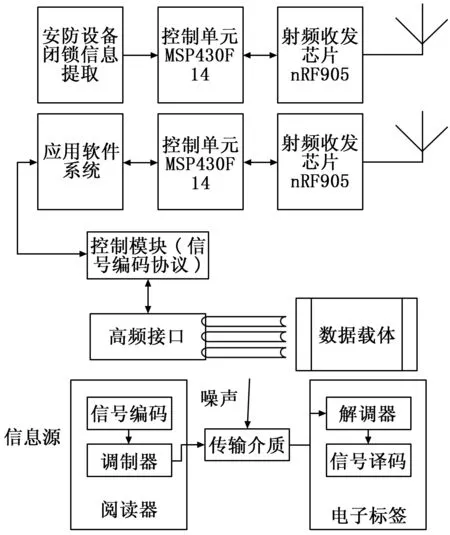
圖2 硬件結構設計
在本研究中, RFID射頻智能鎖利用標簽作為其存儲數據的介質,標簽在硬件結構上包括存儲器、高頻接收/發送接口、微處理器等。標簽的存儲功能通過存儲器完成,高頻接收/發送接口與閱讀器連接,并進行數據通訊,通過微處理器能夠實現信息的尋址,并對接收到的數據信息進行處理[11]。閱讀器的高頻接口為 nRF905 射頻收發芯片,控制單元為 MSP430F14 控制單元,MSP430 系列單片機是由TI(Texas Instrum ents) 美國德州儀器公司) 開發的 16 位微處理器,其功耗很低,利用 MSP430F14 芯片能夠存儲信息并對射頻收發模塊、傳感器進行控制和管理,比如讀取和顯示安防設備的電子標簽的信息,與數據管理系統進行信息交換[12]。
在nRF905 射頻收發芯片內部,其硬件結構有頻率合成器、接收解調器、功率放大器、晶體振蕩器和調制器。nRF905 射頻收發芯片的工作模式為 ShockBuist 方式,在工作過程中能夠自動處理字頭和 CRC,并且通過SPI接口與外界設備(比如微控制器)進行數據通信[13]。使用時,將標簽粘貼在安防設備上,在標簽內則可以存儲安防設備閉合/開啟命令信息。閱讀器是寫/讀設備,用來讀取標簽中的閉合/開啟命令信息并將該信息解碼后,送至數據管理系統進行處理。高頻接口負責發送和接受命令,控制系統實現各種命令控制[14]。
2.2 軟件設計
開發調試環境使用 IA R 的Em bedded W orkbench W orkbench 支持多種微處理器。針對用戶特定的目標系統[15]。用創建項目的方法進行開發和管理。軟件設計首先要對硬件的連接進行定義,包括配置和狀態口。其次就是對 RnF905 的讀寫、收發數據包和收發模式的定義,有了nRF905 的讀寫子程序。就可以很容易對 nRF905 進行配置[16]。當然F149 的串口初始化也是必不可少的具體軟件模塊如下:
MSP430F149初始化程序
vvoid Init403(void)
{
P3SE L= 0x00;
P3D IR 一= CSN + SCK;
P30 UT 一=CSN;
……
}
structRFConfig
{
uchar n;
uchar buf[10]
}
0,0x75,0xOE……
{
void Config 905(void)
{
uchar i;
P3OUT& =- CSN;
SpiWrite (WC);
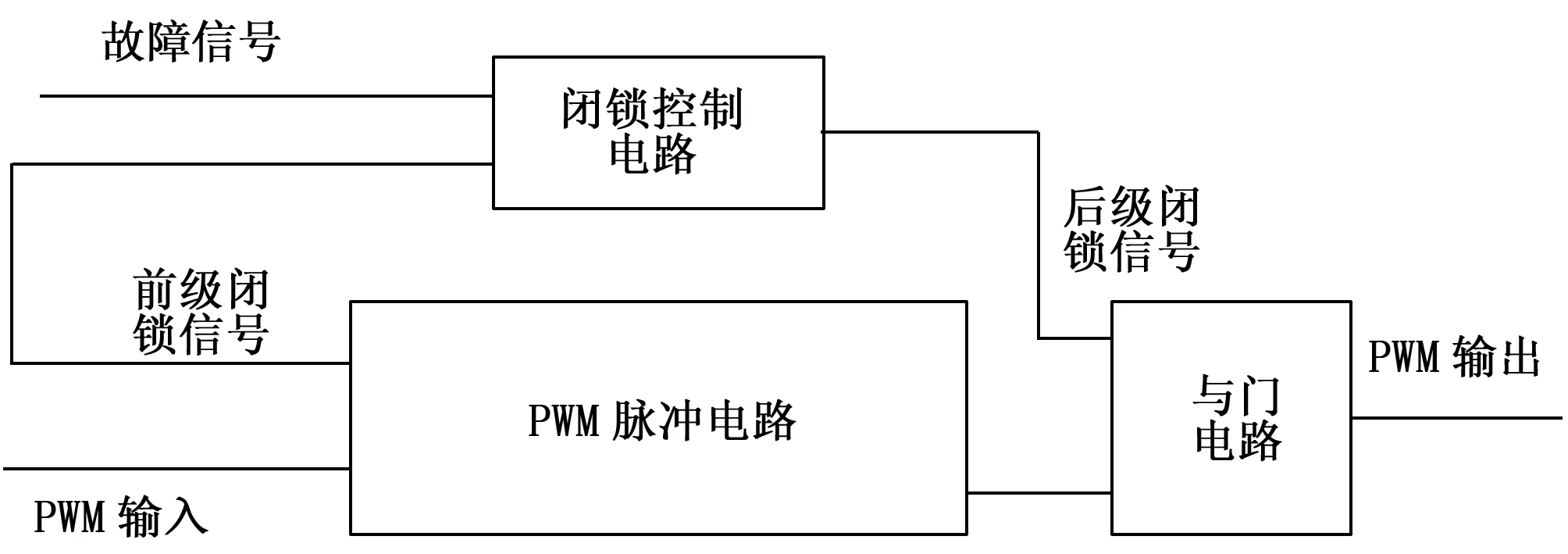
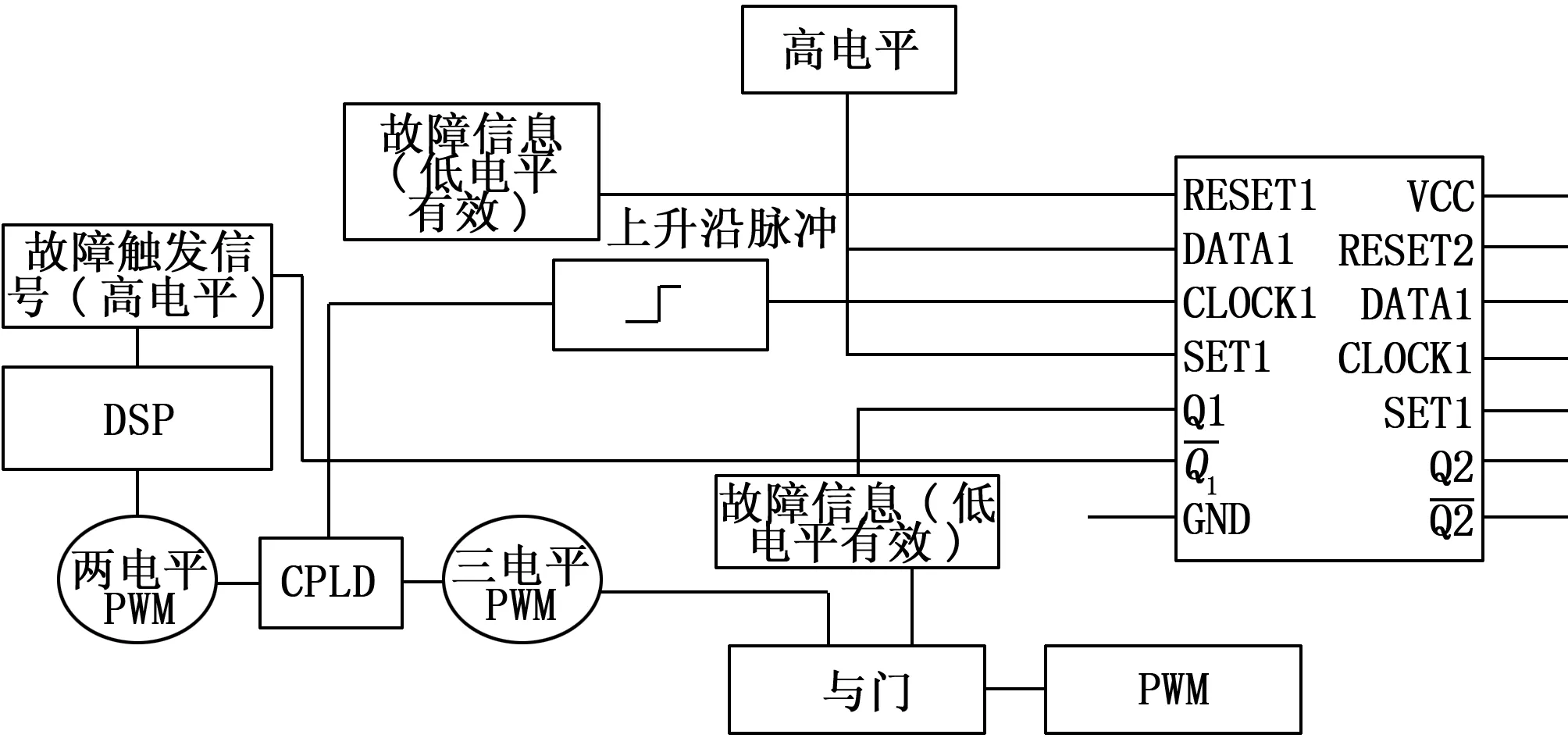
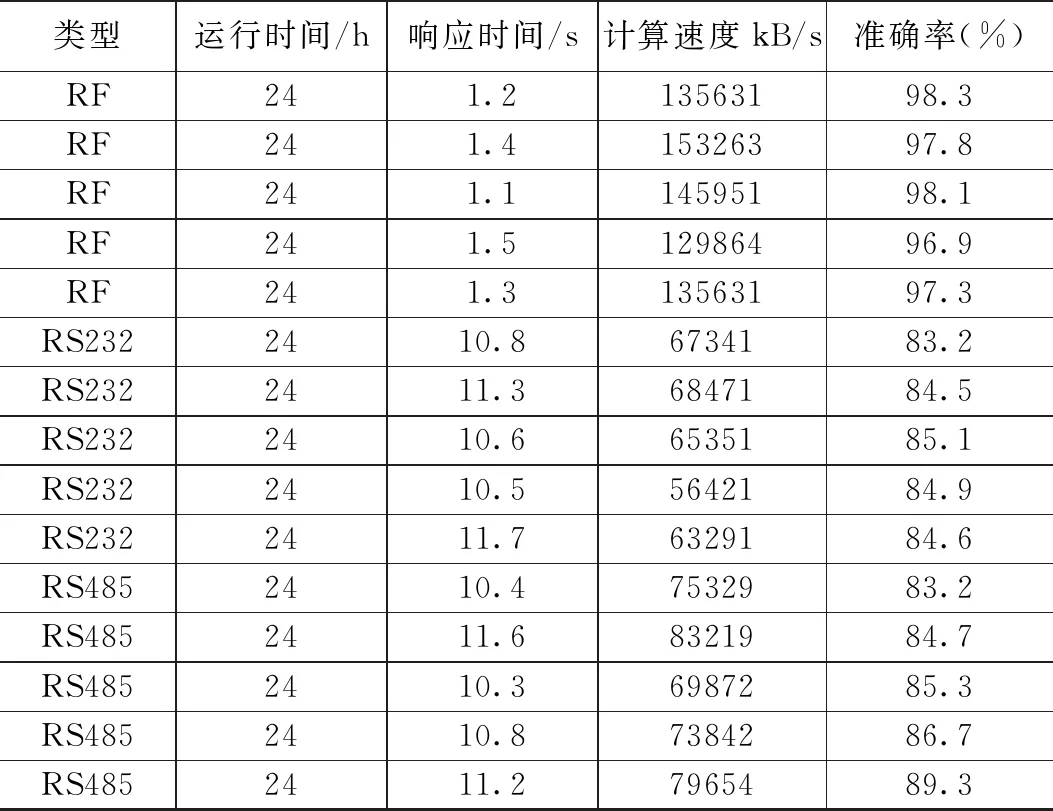
for(i=0;i { SpiWrite(RxTxConf.buf[i]); } P3OUT 一= CSN } RFID 射頻智能鎖在工作時,如果要實現標簽與閱讀器之間的數據交換,需要對閱讀器接收到的信息進行編碼和調制,當信息在編碼和調制完成后,將完成后的編碼信息通過數字通道進行數據傳遞。在進行數據調制時,采用的方法有頻移鍵控(FSK)、振幅鍵控(ASK)及移相鍵(PSK)等,采用的數據通訊信息有TTF(Tag-talks first)以及 RTF(Reader-talks first)等。在采用 TTF 進行信息調制時,標簽反應比較靈敏,一接收到命令,便立即開始動作,迅速做出動作。在采用 RTF 進行調制時,標簽的反應時間沒有TTF 快,但是在信息交互時,能夠避免標簽接發信息之間的互相干擾[17-18]。 在應用時,用戶根據自己的需要進行選擇即可。由于 RFID 技術均采用非接觸式的傳輸方式,因此,在數據的交互過程中,干擾性比較大,針對該問題,除了采用 RTF 技術進行調制外,還可以通過奇偶檢驗的方式來克服上述問題。更具體地說,將奇偶校驗位進行排列組合,直到發送到每個字節中為止。這種方法雖然在一定程度上能夠減少干擾因素,但是需要提前驗證,從而保證了數據的安全傳輸。 數據在傳輸過程中也具有加密功能,閱讀器和標簽能夠基于 IEC9798-2 協議互相驗證。在閱讀器向“查詢指令信息”發送給標簽后[19],標簽將向閱讀器隨機傳遞數據,將該數據假設為 A,則閱讀器立刻生成隨機數 B,為了信息交互的方便,將標簽和閱讀器之間彼此的通訊秘鑰設置為相同。在信息交互過程中,識別秘鑰時,閱讀器利用識密算法能夠計算出加密數據塊,然后再將該加密數據塊傳遞到標簽。標簽在收到數據的同時,也收到了 Tokenl 破譯信息。當確定接收到的破譯信息與自己本身設置的信息一致時,則可確定這兩個密鑰相符[20],編碼信息如圖4所示。 圖3 RFID射頻智能鎖中常用的編碼 在智能安防閉鎖控制系統中,其設置有電子標簽、自動識別裝置、數據中心服務器、網絡服務器和監控計算機等。智能安防閉鎖控制系統如圖4所示,電子標簽設置在RFID射頻智能鎖上,供智能防誤裝置進行識別。 智能防誤裝置通過對RFID射頻智能鎖的電子標簽信息和和數據庫服務器中存儲的標準信息進行對比分析,判斷RFID射頻智能鎖的電子標簽存儲的信息是否與數據中心服務器存儲的標準信息一致。數據庫服務器中存儲的標準信息是用戶提前在軟件系統中設置信息,該信息可以按照相關技術規范進行制定[21]。數據庫服務器通過上文介紹的IEC 61850 通信協議進行數據通訊,在數據庫服務器內,能夠即時生成各種需要的報表和警告。網絡服務器是互聯網的數據交換中轉站,負責數據的傳遞和監控,并且將數據庫服務器與互聯網相互隔開,避免監控計算機被黑客或者是病毒破壞。監控計算機是人際交互界面,工作人員通過監控計算機,對服務器的數據進行查詢、管理和監控[22]。 圖4 控制系統設計 在本研究中,通過閉鎖電路實現閉鎖控制和操作,其電路如圖5所示,該電路能夠接收故障信號,前端還設置有前端閉鎖信號接入口,該口與PWM脈沖電路的輸入端連接,閉鎖控制電路后端通過后級閉鎖信號連接有與門電路。 圖5 PWM閉鎖控制電路 當RFID射頻智能鎖通過射頻發出故障信號時,通過兩路觸發器同時控制PWM脈沖的動作,一路后級閉鎖信號從輸出級關閉PWM脈沖,另一路的閉鎖信號從輸入級關閉PWM脈沖,大大提高了工作效率,最終實現閉鎖操作,增加了電路的可靠性。電路原理圖如圖6所示。 圖6 電路原理示意圖 在本電路設計中,閉鎖控制電路中具有多個D觸發器,在結構布局上,D觸發器的復位輸出端與故障信號的輸入端連接,在多個輸入端處,還連接有后級閉鎖信號,其他的輸入端與前級閉鎖信號連接。PWM脈沖電路通過DSP電路與CPLD芯片連接,輸出的信號為PWM脈沖電流波,然后生成三電平PWM脈沖。 CPLD芯片對生成的D觸發器的時鐘信號進行計算、判斷。在具體工作過程中,D觸發器包括多個類型,比如四D觸發器、六D觸發器等,在工作過程中可以選擇型號為SN74HC74的D觸發器。 那么如何實現故障信號的鎖存呢?在D觸發器SN74HC74內通常設置有與非門電路,該電路中的兩個輸入端分別與兩個輸出端連接。該電路中還設置有時鐘端和數據端。在時鐘端時,如果其輸出為高電平,則接收到的信息會跟隨D端進行動作。當SN74HC74的D觸發器接收到的故障信號變為低電平時,則在較短的時間內,對故障信號進行鎖存[24]。 在后級硬件進行閉鎖時,低電平信號I_OVER的輸出端與觸發器的RESET腳的輸入端連接,實現低電平信號的輸入, 此時,將信息輸出至CLOCK1輸入上升沿脈沖,在Q1引腳處,其輸出信息為低電平CLOSE信號,將該處的CLOSE信號進行信號轉換,轉換后的信號通過引腳CLOSE OUT輸出,該輸出信號輸入至與門的2腳,然后將CLOSE OUT的輸出信號與1腳的PWM脈沖進行與門計算,計算后的信號輸出為低電平信號,此時,1腳的輸出信號不管為高電平還是低電平,3腳的輸出信號均輸出為低電平,在輸出信號結束后,將PWM脈沖信號關閉,繼而阻斷后級的PWM脈沖信號[23]。當電路中出現過電流時,Q1腳輸出信號為低電平信號,此時,Q2腳為通路狀態,而Q3則為關閉狀態。PWM脈沖信號能夠將輸出信號轉換為高電平信號,再經過DSP處理單元處理、計算后,將高電平信號輸出中斷,這就實現了在輸入端處,阻斷PWM脈沖信號,當RFID射頻智能鎖通過射頻發出故障信號時,RESET1將高電平信號轉換為低電平信號,此時,CLOCK1時鐘信號輸入到上升沿脈沖,觸發輸出端Q1和Q1非則出現電平翻轉,實現了鎖閉操作[25]。 上述系統通過在江蘇方天電力技術有限公司進行試運行,現在將本研究的技術與常規技術中采用RS232和RS485的方式進行對比分析。其中構建的模擬架構圖如圖7所示。采用的服務器操作系統為 WindowsServer2015,數據庫管理系統軟件為 SQLServer2015, Web 服務器軟件為IIS6.0。 圖7 系統仿真設計結構圖 試驗時,分別將本研究的技術方案、RS232和RS485技術分別運行24個小時,分別在響應時間、計算速度和準確度上進行對比分析,在運行24小時后,分別記錄每種技術的數據情況,基于篇幅的額現值,每種記錄5種數據,數據記錄表如表1所示。 通過上述試驗可以看出,相對于RS232和RS485通訊,采用RFID射頻識別技術的響應時間快,技術速度較快,數據的準確率較高。通過半年時間的運行,觀察系統的穩定性情況下,如圖8所示。其中縱坐標表示穩定度,也叫誤差百分比。 其中穩定度的計算公式是: 通過上述公式計算,再通過大量的數據進行計算,統計出系統運行半年時間的誤差數。通過試運行,本研究的方法穩定性較好,計算誤差小。 表1 試驗數據表 圖8 穩定性運行示意圖 本研究基于RFID技術、物聯網技術、人工智能技術、自動化控制技術設計出新型的智能安防閉鎖系統,通過非接觸式的方式,借助于RFID射頻智能鎖自動識別底層安防信息,自動獲取安防系統底層設備信息。通過對RFID射頻智能鎖進行設計,從原理上和結構上說明了采用RFID射頻智能鎖接收安防故障信息的原理,基于RFID技術,設計出智能安防閉鎖控制系統和控制電路,并說明了控制原理。本研究解決了傳統技術中存在的技術弊端,在一定程度上具有技術進步性。安防閉鎖系統是一個復雜的系統,RFID技術雖然反應時間快,但是RFID視頻識別設備安裝位置不同,其具有的效果也不同,因此,在運行過程中,仍舊存在很多技術問題,這需要進一步的研究和探討,隨著電子技術的發展,RFID技術必將面臨一個新的時代。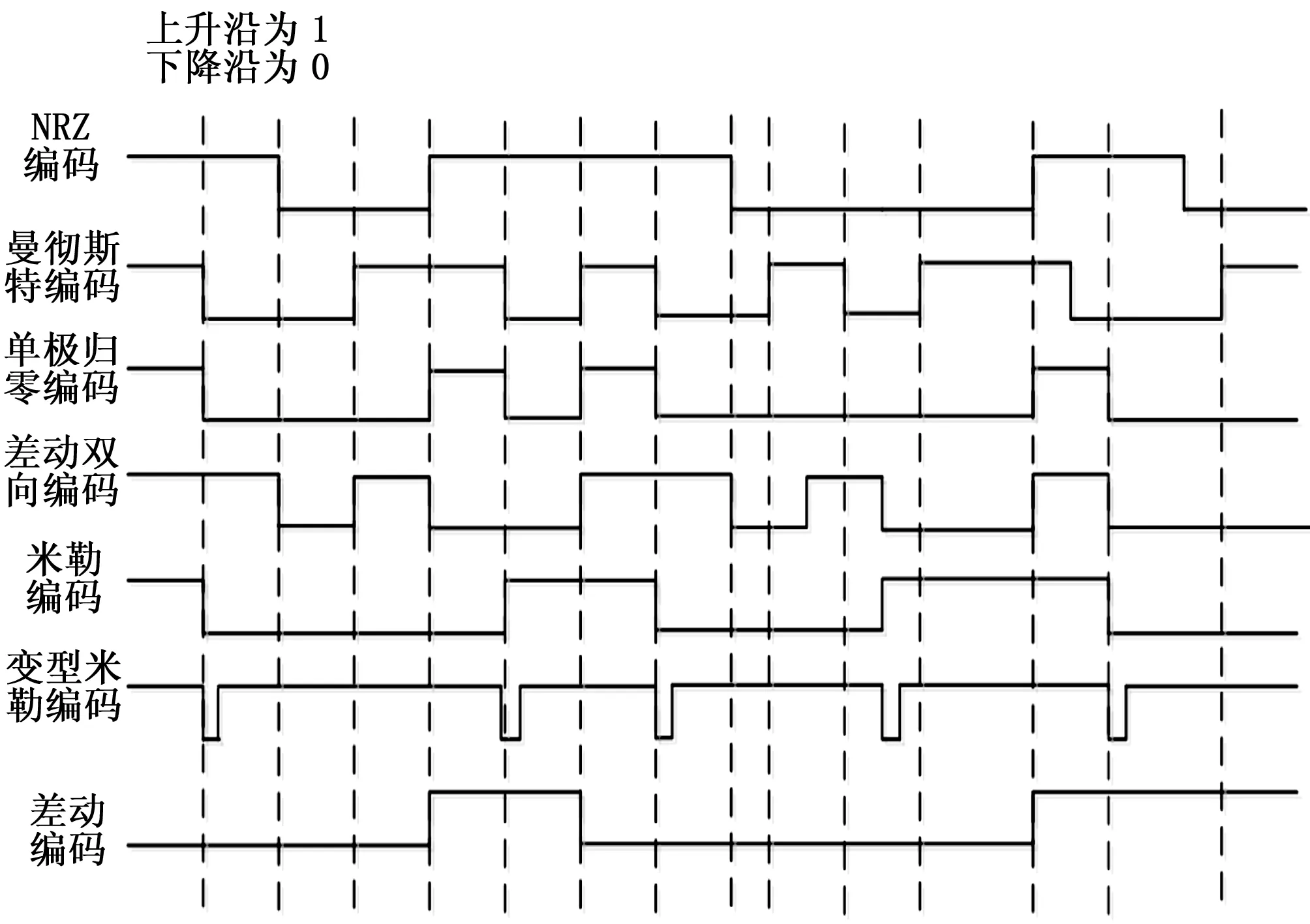
3 安防閉鎖控制

4 試驗結果與分析


5 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46
