基于改進DE 的城軌列車節(jié)能速度曲線研究
2020-12-08 07:46:36聶瑩瑩郭彥宏董渠江
鐵路計算機應用 2020年11期
聶瑩瑩,謝 剛,郭彥宏,董渠江
(1. 西南交通大學 信息科學與技術學院,成都 610031;2. 中鐵二院工程集團有限責任公司 通信信號研究設計院,成都 610031)
城市軌道交通在為居民提供便捷乘車服務的同時也產生了巨大的能源消耗[1]。據(jù)統(tǒng)計,牽引能耗為列車運行的主要消耗[2]。荀徑對列車節(jié)能操縱優(yōu)化求解方法進行了綜述[3];許立、耿晨歌采用遺傳算法對列車運行速度曲線生成進行研究,但評價模型過于苛刻[4-5];丁圣采用非支配排序遺傳算法研究列車多目標操縱優(yōu)化,運算復雜度較高[6];劉煒采用時間逼近搜索算法建立節(jié)能優(yōu)化模型,但未考慮舒適度要求[7]。本文根據(jù)惰行控制理論[8],建立分段漸進式的評價模型,并將舒適度要求納入約束條件,采用改進的差分進化(DE,Differential Evolution)算法研究列車節(jié)能優(yōu)化速度曲線的生成,以減少列車牽引能耗。
1 問題分析與模型構建
1.1 問題分析
城軌列車節(jié)能問題本質上是一個多目標優(yōu)化問題,包含列車準時到達、定點停車和牽引能耗最小的目標。多目標問題求解可將多目標轉化為單目標,或是直接采用多目標優(yōu)化方法。采用Pareto 非支配排序方法可對多目標問題進行求解[9],但實驗研究表明,僅數(shù)代之后,種群中的個體都進化為Pareto 非支配個體,此時再將Pareto 非支配個體作為最優(yōu)解的評價標準將失去意義[10]。因此本文采用建立各目標的評價模型,再通過權重分配合成單目標的方法。
1.2 力學模型與能耗計算
本文采用多質點列車模型,遵循如下假設條件:
(1)列車為質量分布均勻的剛體,是由足夠多數(shù)量的質點組成的質點鏈;
(2)不考慮車鉤間作用力對列車的影響;
(3)牽引和制動級位各5 級。
在列車運行過程中,作用在列車上的運行方向的力分為3 類:牽引力、運行阻力和制動力。
以列車沿斜坡向上運行為例,如圖1 所示,其中F、B、W分別為列車受到的牽引力、制動力、阻力,F(xiàn)與運動方向一致,B、W 與運動方向相反;N 為支持力;G 為重力。則列車沿運動方向所受合力Fh為:

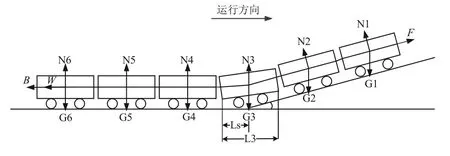
圖1 列車受力分析
列車牽引力、制動力主要與列車型號、列車運行速度有關。當列車處于牽引狀態(tài)時,B為0;處于惰行狀態(tài)時,F(xiàn)和B均為0;處于制動狀態(tài)時,F(xiàn)為0。
列車運行阻力一般由基本阻力和線路附加阻力組成。基本阻力公式如下:

其中,w0為單位基本阻力;a、b、c為經驗常數(shù),v為列車速度。
線路附加阻力主要包括坡道附加阻力和曲線附加阻力。當單列車廂處于不同的坡道上時,其坡道附加阻力ws為:

其中,車廂一長為Ls部分處在千分坡度數(shù)為y1的坡道上,車廂另一長為L-Ls部分處在千分坡度數(shù)為y2的坡道上;G為該車廂重量。如果單列車廂位于同一坡道,則只需計算該公式的前半部分即可。
同理,單列車廂位于不同的曲線半徑,其曲線附加阻力wr為:

其中,車廂一長為Lr部分處在半徑為R1的彎曲線路上,車廂另一長為L-Lr部分處在半徑為R2的彎曲線路上。
將各個車廂所受阻力相加,即為列車受到的總阻力W。
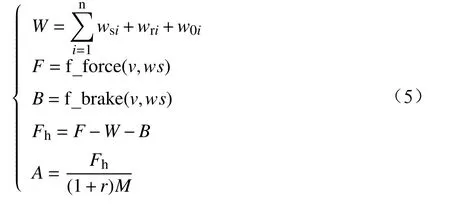
其中,i為車廂號,i=1,···,n,n為車廂數(shù);A為列車加速度;r為列車旋轉質量系數(shù),M為列車質量;以時間步長0.1 s,得到列車在各時間步長內的參數(shù)計算公式。f_force(v,ws)、f_brake(v,ws)分別為牽引力、制動力計算函數(shù),與列車速度v和工況狀態(tài)ws 有關。
牽引能耗是列車運行過程中牽引力做的功,計算公式如下:

其中,n為根據(jù)牽引力的改變而劃分的區(qū)段數(shù);Fi、ΔSi分別為第i段的牽引力和牽引力作用的距離;i=1,···,n;E為列車牽引力在站間所做的功,即牽引能耗。
1.3 列車運行工況轉換原則
根據(jù)惰行控制方式,列車運行由牽引、惰行和制動3 種工況組成,工況轉換需要滿足轉換規(guī)則才能進行,如表1 所示。
2 改進DE 算法
DE 算法是Rainer Storn 等人于1995 年提出的一種采用實數(shù)編碼模擬生物進化的算法,具有高效的全局搜索效果和收斂性能[10]。但在求解多目標最優(yōu)化問題時,有易過早收斂、陷入局部最優(yōu)等問題。本文對現(xiàn)有的DE 算法進行改進,根據(jù)多目標優(yōu)化的特點提出了新的交叉策略,提升基于DE 進化策略的收斂性能和全局搜索能力。
改進算法對種群進行約束條件下的初始化,經變異和改進的交叉策略,再通過評價模型得到個體適應值,選出高適應個體組成下一代種群,使種群進化反復循環(huán),直到滿足終止準則,則算法結束,如圖2 所示。
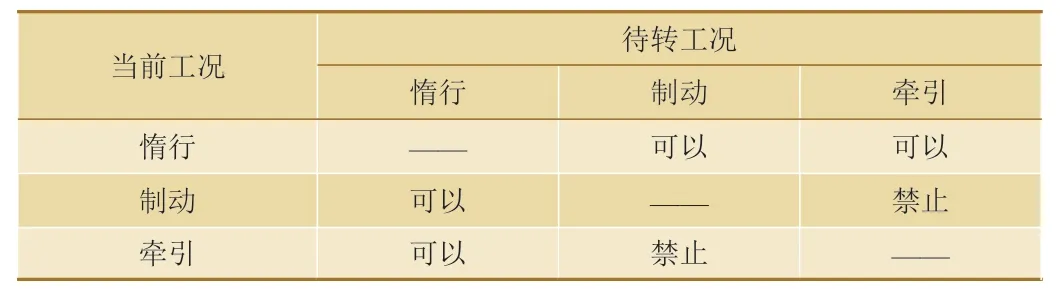
表1 工況轉換規(guī)則
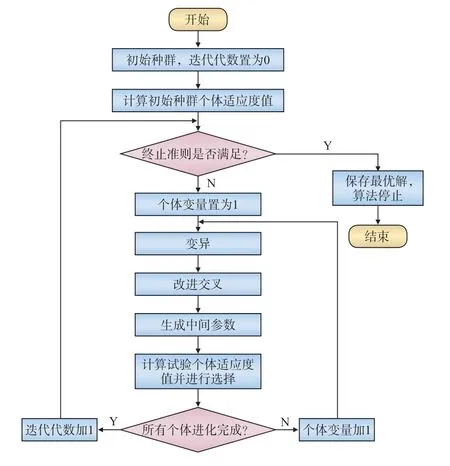
圖2 改進DE 算法流程
2.1 個體基因設計與初始化種群
本文采用位置與工況狀態(tài)值組合的實數(shù)編碼對個體基因進行設計,位置向量組和工況狀態(tài)組均包含D 個點,起始點位置為0,工況狀態(tài)為牽引工況,末點位置為目標停車點Se、工況狀態(tài)為制動工況。種群的個體基因組合GE 為:

其中,gi表示第i個點的個體基因,i=1,···,D,由位置si和工況狀態(tài)值wsi組合而成。
根據(jù)1.2 小節(jié)的假設條件,牽引和制動級位各5 級,如表2 所示。其中工況值1 ~ 5 分別代表制動輸出19%、39%、59%、79%、99%,6 ~ 10 分別代表牽引輸出19%、39%、59%、79%、99%。

表2 工況狀態(tài)值
在種群初始化過程中,生成的個體需要約束,以篩選初始種群,其流程如圖3 所示。
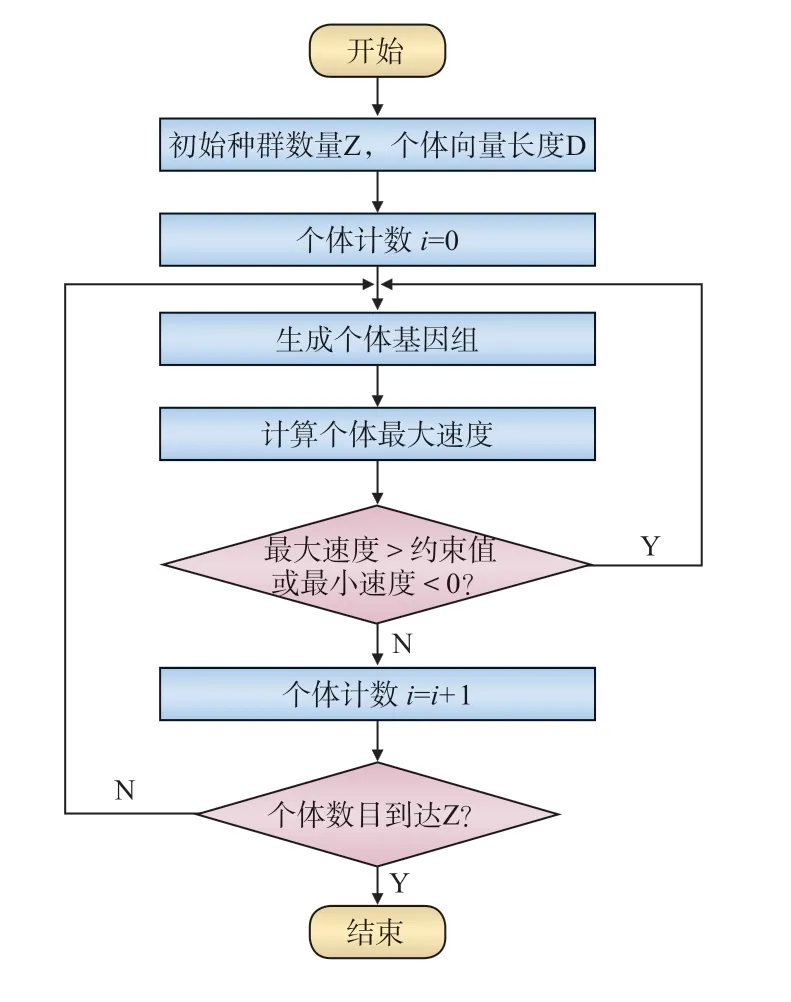
圖3 種群初始化流程
2.2 約束條件分析
本文以區(qū)間限速、最大加速度、最大減速度、運行工況轉換原則和牽引制動特性做為約束條件,將舒適度也納入其中[11],約束條件為:
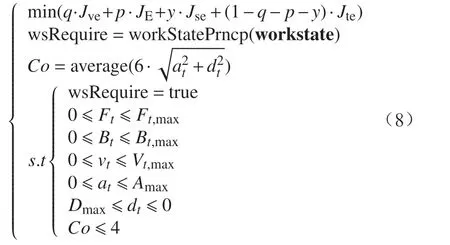
其中,Jve、Jse、JE和Jte分別是末速度、末位置、牽引能耗和運行時間評價值;q、p、y分別是末速度、能耗和末位置評價值所占適應度函數(shù)的權重,1-q-p-y為運行時間評價值的權重,min 為所有個體中的最小值;wsRequire 為工況評價值,為true 表滿足工況轉換原則;workstate 為列車運行工況轉換序列;workStatePrncp 是工況轉換原則判斷函數(shù);Co為舒適度評價值,其值小于4 時,舒適度滿足要求;vt、at、dt、Ft、Bt分別為t時刻列車運行速度、加速度、減速度及受到的牽引力、制動力;Ft,max、Bt,max為t時刻可輸出的最大牽引力、最大制動力;Vt,max為線路在時刻t的最大允許速度;Amax、Dmax為最大允許加速度、最大允許減速度。
2.3 目標評價模型與終止準則
為了保證個體較好的適應性和全局收斂性,結合本文的節(jié)能優(yōu)化模型,基于Matlab 進行實驗仿真,建立了分段漸進式評價模型,如圖4~圖7 所示。評價模型在形式上保持一致,可有效抑制種群優(yōu)化趨勢向某個目標傾斜,保證種群優(yōu)化的目標多樣性。
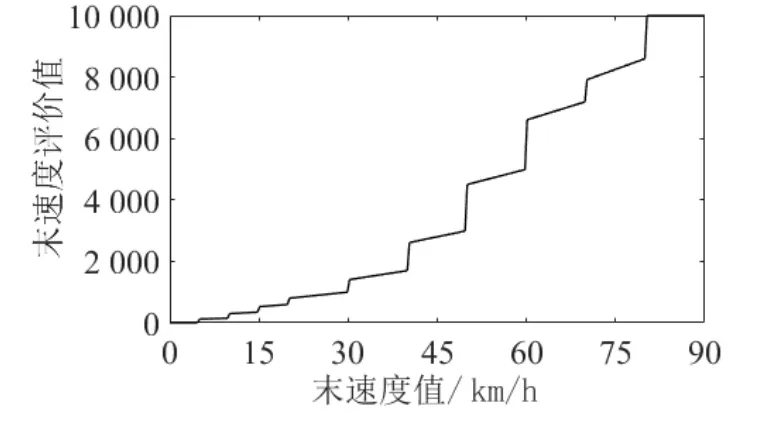
圖4 末速度評價模型
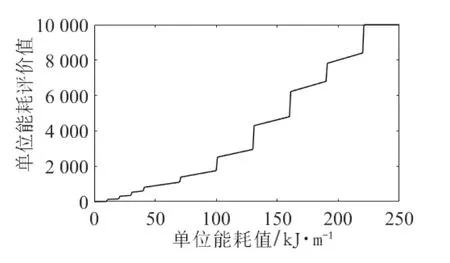
圖5 牽引能耗評價模型
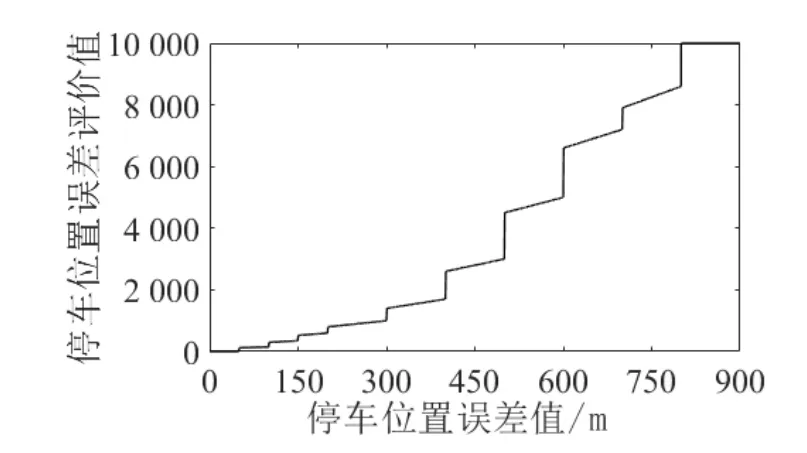
圖6 停車位置誤差評價模型
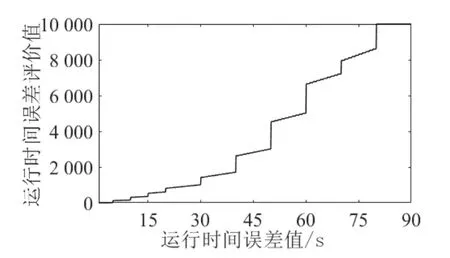
圖7 運行時間誤差評價模型
末速度評價模型對個體的末速度在0 ~ 80 km/h之間進行分段評價,其評價值范圍為0 ~ 10 000,末速度超出80 km/h 按最高記。牽引能耗評價模型、停車位置誤差和運行時間誤差評價模型也類似。
種群終止準則是種群停止進化的一個標準。根據(jù)實測數(shù)據(jù),如圖8 所示,在60 代以內的收斂幅度較大,60 代以后,收斂幅度趨于平緩。故本文設置迭代次數(shù)為100,即可達到預期效果。
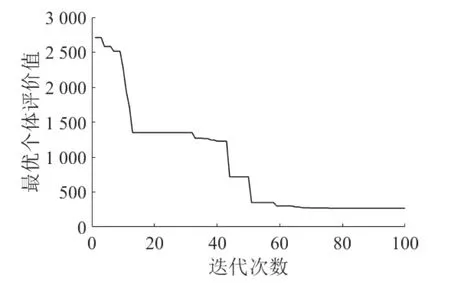
圖8 迭代次數(shù)與評價值
3 算法參數(shù)設計與中間參數(shù)生成
改進DE 算法包含2 個重要參數(shù):縮放因子和交叉概率。
3.1 縮放因子
縮放因子Fs是控制差分矢量對基向量影響大小的參數(shù)。本文對Fs的取值進行了測試,F(xiàn)s為0.5 時,收斂效果好,如表3 所示。
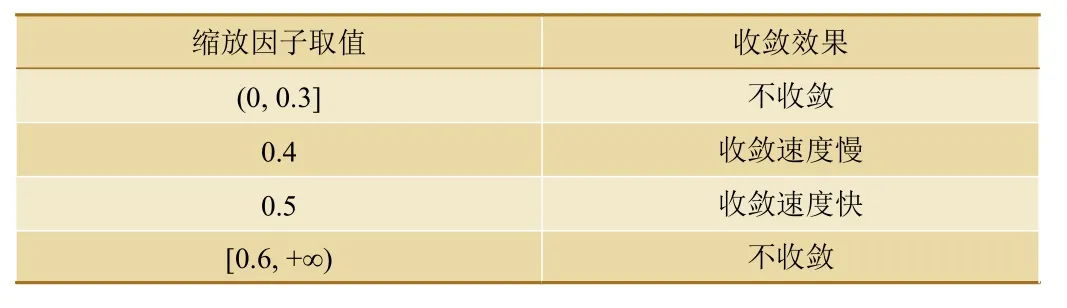
表3 縮放因子對收斂的影響
3.2 交叉策略的改進
為進一步增強種群多樣性,DE 算法交叉目標個體Xk(ts)與變異個體Vk(ts+1),產生候選個體Uk(ts+1),ts代表迭代的代數(shù),k表示第k個個體。
采用DE 算法的交叉策略求解發(fā)現(xiàn),下一代個體中變異個體較少,使算法的收斂效果較差。個體被淘汰的原因有:變異個體的基因值不符合個體基因向量組的要求,交叉概率使一部分個體淘汰。
為使變異個體有效,對變異策略進行如下改進:
(1)對變異的無效個體進行有效化處理。

其中,vkj和vkD分別為變異個體Vk(ts+1)中的第j維分量和第D維分量,WSe為制動工況值。
(2)增大交叉概率為1,使收斂效果最好。
3.3 中間數(shù)據(jù)生成
圖9 為個體末速度生成流程,其他數(shù)據(jù)生成也類似。
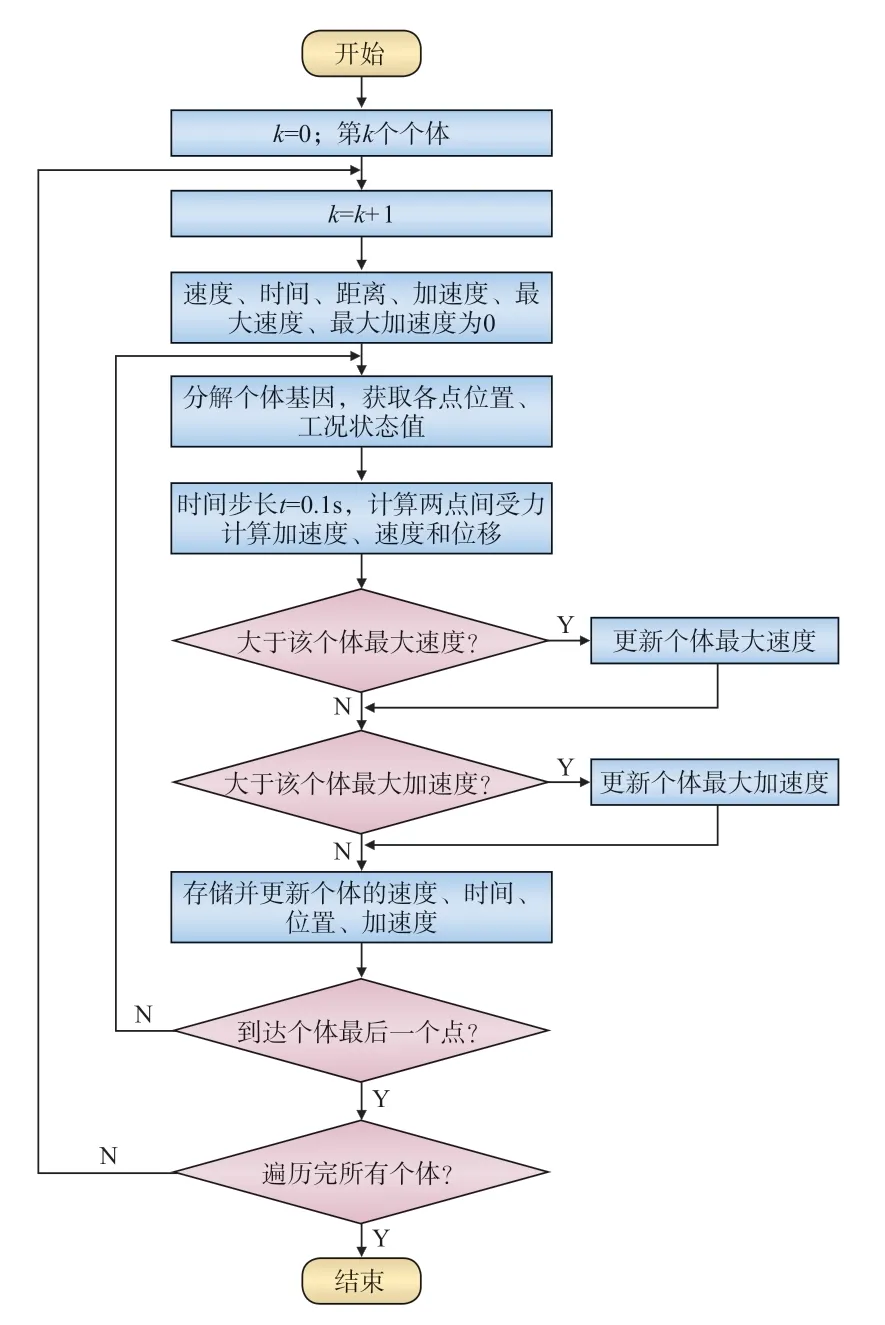
圖9 個體末速度生成流程
4 算例分析
本文采用文獻[7]中提供的上海地鐵的線路數(shù)據(jù),如表4~表6 所示;實現(xiàn)帶線路區(qū)段限速的列車自動運行(ATO,Automatic Train Operation)曲線生成。列車型號為AC-03,車長144 m,AW2 質量327.6 T,牽引特性[8]如圖10 所示。
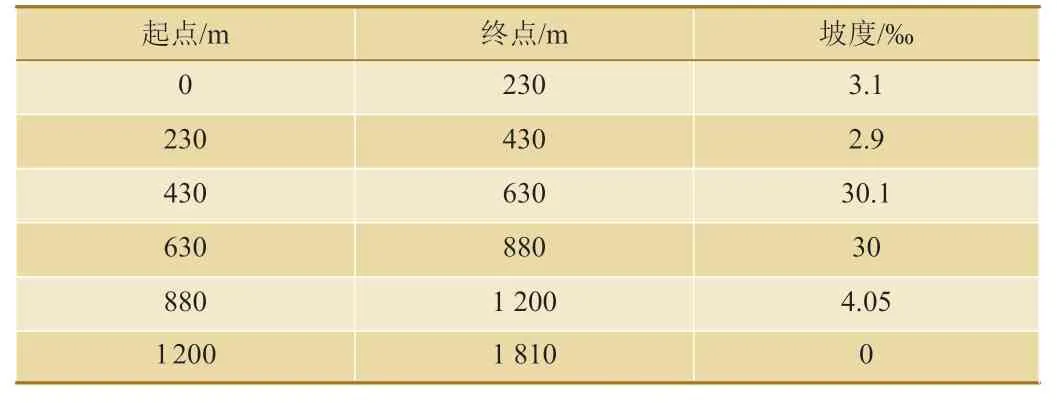
表4 線路坡度
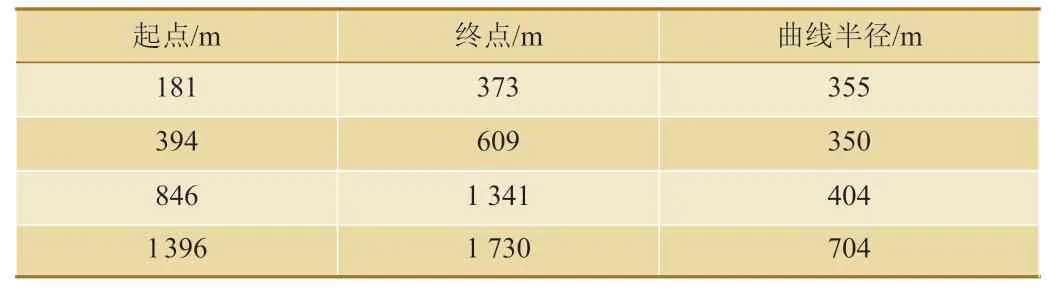
表5 線路曲線
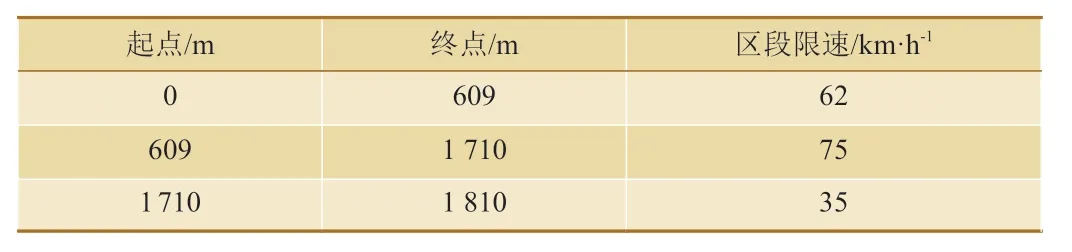
表6 線路限速
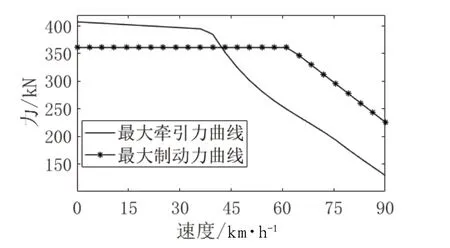
圖10 AC03 牽引制動特性曲線
如圖11 可知,隨著迭代次數(shù)的增加,個體評價值不斷減小,個體適應度不斷提高,表明算法的收斂效果良好。
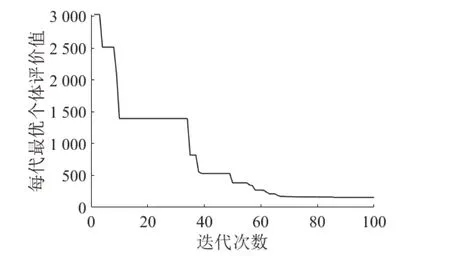
圖11 100 代最優(yōu)個體評價值

圖12 最優(yōu)ATO 速度曲線
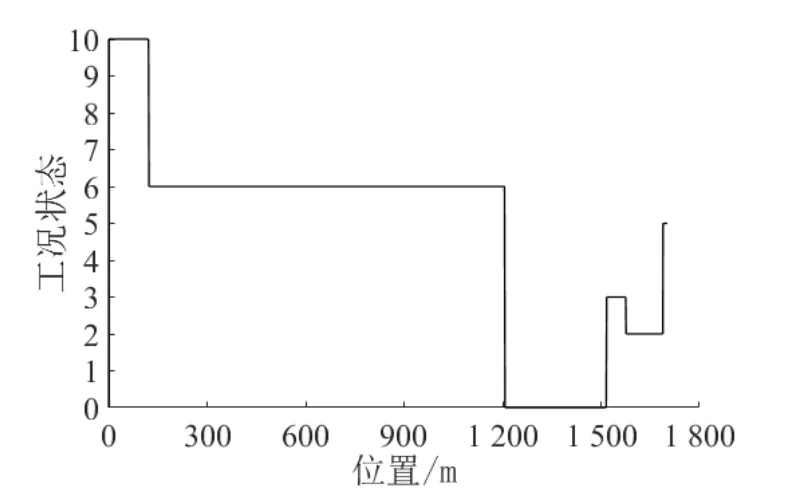
圖13 工況距離曲線
圖12 是算法生成的最優(yōu)ATO 速度曲線。圖13是工況距離曲線,列車在平坡段施加牽引力加速,然后進行緩慢牽引,在上坡段惰行一段時間,最后施加制動減速停車。在滿足區(qū)間運行時分的前提下,盡可能地利用了線路優(yōu)勢,減少了牽引能耗。其牽引能耗為28.8 kW·h,較文獻7 節(jié)能38%。
5 結束語
本文采用多質點模型分析列車運動情況,基于改進的DE 算法,分析線路約束條件,建立評價模型,構建適應度函數(shù),使種群向低能耗、末速度小的方向進行優(yōu)化。以上海地鐵3 號線數(shù)據(jù)為例,經仿真試驗,牽引能耗28.8 kW·h,生成的ATO 速度曲線,在滿足定點準時停車的前提下,達到了節(jié)能的目標,證明改進DE 算法可用于解決列車節(jié)能優(yōu)化速度曲線問題。但該算法在限速較多的區(qū)段,速度曲線計算時間較長,仍需進一步研究和改進。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51