摩擦式提升機鋼絲繩魯棒縱向振動抑制*
2020-12-08 02:02:46朱真才丁興亞
振動、測試與診斷 2020年5期
朱真才, 沈 剛, 丁興亞, 湯 裕, 李 翔
(中國礦業(yè)大學(xué)機電工程學(xué)院 徐州,221116)
引 言
深井提升系統(tǒng)作為礦井生產(chǎn)的咽喉,其穩(wěn)定運行狀態(tài)影響著企業(yè)的生產(chǎn)效率和人員的安全。鋼絲繩是保障提升系統(tǒng)安全運行的一個關(guān)鍵構(gòu)成單元,但在實際運行過程中,鋼絲繩由于重載長距離提升,自身存在一定的彈性形變,同時鋼絲繩本身由于生產(chǎn)制造誤差、鋼絲繩與繩槽的磨損以及鋼絲繩在摩擦滾筒上的滑動、蠕動等因素會引起鋼絲繩的橫向及縱向振動,加之提升容器與罐道之間的沖擊以及井內(nèi)的空氣干擾都會使得鋼絲繩的振動變得更加劇烈,致使鋼絲繩承受強復(fù)變載荷,加劇其疲勞損傷程度,進而減少使用壽命,也會影響乘坐人員舒適性[1-3]。
為了抑制提升鋼絲繩的振動,國內(nèi)外學(xué)者已做了一定的研究。文獻[4]應(yīng)用Hamilton原理和有限差分法,研究了天輪軸向擺動對提升鋼絲繩橫向振動的影響。文獻[5]研究了一類存在外界干擾和參數(shù)不確定情況的柔性結(jié)構(gòu)振動抑制問題,提出了一種基于神經(jīng)網(wǎng)絡(luò)狀態(tài)觀測器的主動振動抑制方法。文獻[6]針對鋼絲繩橫向振動抑制存在的外界干擾問題,設(shè)計了擾動觀測器以消除邊界擾動。文獻[7]在鋼絲繩的振動模型中引入節(jié)點應(yīng)變率,并通過設(shè)計的線性二次調(diào)節(jié)控制器實現(xiàn)了鋼絲繩的振動抑制。文獻[8]針對存在外部干擾和測量誤差的柔性航天器無慣性姿態(tài)控制問題,通過設(shè)計一種新的中間觀測器已估計姿態(tài)和模態(tài)信息,實現(xiàn)了姿態(tài)穩(wěn)定和振動抑制。文獻[9]通過設(shè)計一種基于觀測器的輸出反饋控制律抑制礦用鋼絲繩的軸向振動。與礦用提升機相關(guān),關(guān)于電梯提升鋼絲繩振動問題也有一定的研究[10-12]。
綜上,筆者以摩擦式提升機為研究對象,考慮到提升機動力學(xué)模型的復(fù)雜性及參數(shù)不確定性,以自適應(yīng)魯棒控制理論設(shè)計提升鋼絲繩振動抑制控制器,取得了較為理想的控制效果。
1 數(shù)學(xué)建模
筆者以摩擦式提升機為研究對象,為了對該系統(tǒng)進行動力學(xué)分析,首先需要建立系統(tǒng)的動力學(xué)模型。因為摩擦式提升機的4根提升鋼絲繩具有類似的動力學(xué)特性,因此將模型進行簡化,以單根提升鋼絲繩為研究對象,該機構(gòu)的簡化模型如圖1所示。

圖1 摩擦式提升機簡化模型Fig.1 Simplified model of friction hoist
圖1中天輪下安裝有液壓作動器。提升系統(tǒng)運行過程中,提升容器上安裝的加速度傳感器將容器的振動加速度反饋回控制系統(tǒng),并計算得到容器的振動速度和振動位移。控制器即可根據(jù)實時獲得的天輪端和容器端的振動位移、振動速度以及提升狀態(tài)參數(shù),求解所需的控制輸入,并通過電液伺服系統(tǒng)完成振動位移的補償,實現(xiàn)振動抑制。
假設(shè)該提升系統(tǒng)采用的是剛性罐道,則對提升容器振動影響較大的只有鋼絲繩的縱向振動,在建模過程中,筆者將橫向振動進行了忽略。在t時刻,位于垂直提升主繩空間位置x處某一質(zhì)點的縱向振動位移為u(x,t),該點的動態(tài)張力P(x,t)為該點的準(zhǔn)靜態(tài)張力T(x,t)與彈性力EAε(x,t)之和,其數(shù)學(xué)表達式為
P(x,t)=T(x,t)+EAε(x,t)
(1)
其中:EA為鋼絲繩抗拉剛度;ε(x,t)為鋼絲繩在空間位置x處、t時刻的正應(yīng)變,且ε(x,t)=ux(x,t)。
以垂直提升主繩作為研究對象,在進行系統(tǒng)動力學(xué)建模時先做以下假設(shè):
1) 提升鋼絲繩和尾繩均為均值鋼絲繩;
2) 提升鋼絲繩的形變與張力服從胡克定律;
3) 不考慮空氣阻力對鋼絲繩和提升容器的影響。
然后,基于Hamilton原理推導(dǎo)垂直提升主繩縱向振動方程。系統(tǒng)動能為
(2)

假設(shè)尾繩為集中于提升容器底部的集中質(zhì)量,則ma的數(shù)學(xué)表達式為

(3)

系統(tǒng)勢能為

(4)
其中:T(x,t)為在t時刻垂直提升主繩空間位置x處質(zhì)點的準(zhǔn)靜態(tài)張力。
T(x,t)可表示為
T(x,t)=(ma(t)+ρ(l(t)-x))g
(5)
系統(tǒng)虛功為
(6)
其中:c1,c2分別為提升容器和天輪處的阻尼系數(shù);f(t)為液壓作動器施加給天輪的激振力。
應(yīng)用Hamilton原理

(7)
聯(lián)立式(2)、式(4)和式(6),結(jié)合系統(tǒng)幾何邊界δW(0,t)=δW(l,t)=0,運用變分理論與分部積分算法,可以求得提升鋼絲繩縱向振動的自由振動方程為
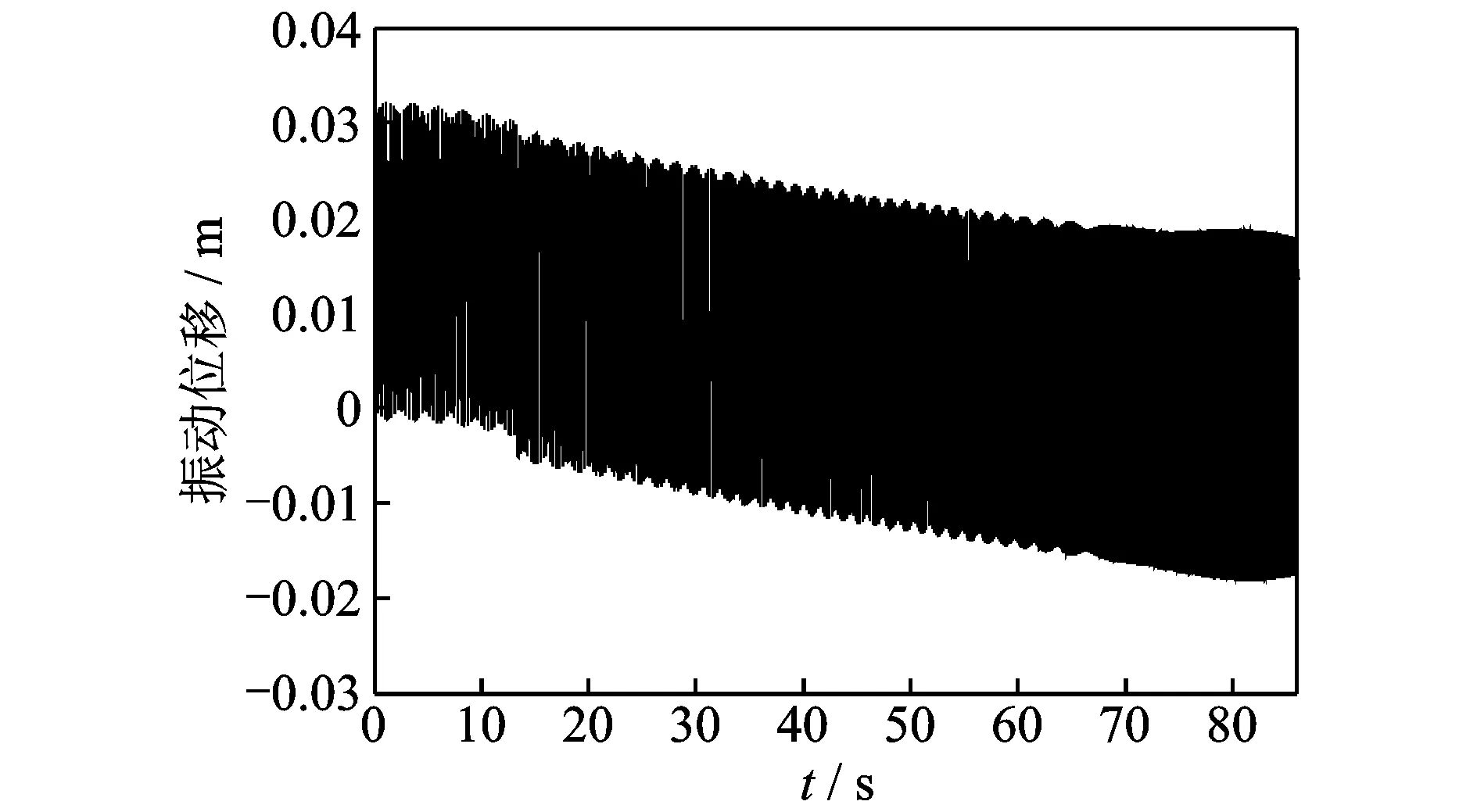
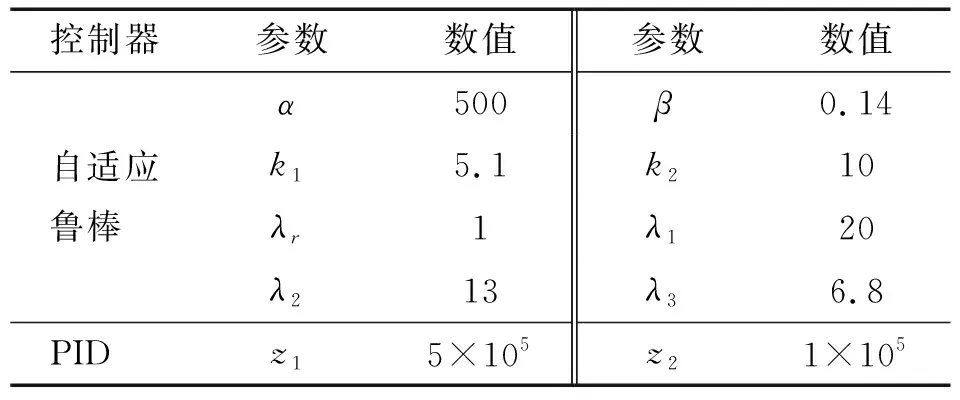
EAuxx+ρg=0 (0 (8) T-f-c2(v+ut+vux)=0 (x=0) (9) EAux+mag-c1(v+ut+vux)=0 (x=l) (10) 由式(5)可以得到 T(l,t)=mag (11) T(0,t)=(ma+ρl)g (12) Tx=-ρg (13) 將式(11)~(13)代入式(8)~(10)進行簡化,可以得到 (0 (14) (15) 式(14)~(16)即為筆者研究的摩擦式提升機動力學(xué)模型,基于此進行下面的控制器設(shè)計。 圖2所示為提升鋼絲繩振動抑制的控制系統(tǒng)圖。 圖2 提升鋼絲繩振動抑制控制原理Fig.2 Control principle of vibration suppression of hoisting wire rope 考慮系統(tǒng)模型參數(shù)不確定性,定義系統(tǒng)的未知參數(shù) 不同的移動應(yīng)用類型在實現(xiàn)方式上對應(yīng)著不同的應(yīng)用開發(fā)技術(shù)棧,主要包括傳統(tǒng)模式、Bridge模式和寄生模式等3種。 φ=[c1c2ma] (17) 則未知參數(shù)的觀測值為 (18) 結(jié)合系統(tǒng)的動能和勢能,定義Lyapunov函數(shù)為 (19) 同時 由式(19)可以發(fā)現(xiàn),當(dāng)滿足條件α>2βl時,V(t)是正定的。為了進行控制律的設(shè)計,首先對式(19)求導(dǎo),同時結(jié)合系統(tǒng)狀態(tài)方程(14)~(16)可以得到 (v+ut+vux)((ma+ρl)g-f)|x=0- c2(v+ut+vux)2|x=0 (21) 由式(5)可得 (22) 同時,基于分布積分法,可以得到 由此可以得到 (25) 其中 (27) 將控制律式(26)代入式(25),可以得到 (28) 其中 (29) 定義參數(shù)自適應(yīng)律為 (30) 其中:λr為正常數(shù)。 將自適應(yīng)律式(29)代入式(27),可以得到 (31) (32) 由此可以證明,所設(shè)計的控制律能夠保證系統(tǒng)的穩(wěn)定性。 為了驗證所提算法的有效性,運用Matlab仿真軟件對所提的振動抑制算法進行仿真研究,并采用傳統(tǒng)的PID算法進行對比驗證。PID控制律為 f=(z1u+z2(ut+vux))|x=0 (33) 仿真中摩擦式提升系統(tǒng)的物理參數(shù)如表1所示。 表1 摩擦式提升系統(tǒng)仿真物理參數(shù)Tab.1 Simulated physical parameters of frictional lifting system 提升系統(tǒng)的提升高度與提升速度曲線如圖3、圖4所示。當(dāng)系統(tǒng)處于開環(huán)狀態(tài)下運行時,提升容器的縱向振動位移如圖5所示。 圖3 提升系統(tǒng)的提升高度曲線Fig.3 Lifting height curve of the lifting system 圖4 提升系統(tǒng)提升速度曲線Fig.4 Speed curve of the lifting system 圖5 無控制器時提升容器處的縱向振動Fig.5 Longitudinal vibration at the lifting container without controller 由圖可以看出:提升過程中,提升容器有較大的縱向振動;同時隨著提升高度的增加,即提升鋼絲繩的懸垂長度逐漸減小,提升容器的振動位移偏移量也在逐漸減小,而振動頻率逐漸增加。在運行的第13.3s和第72.7s,容器的振動位移由于提升加速度的變化而出現(xiàn)了突變。這些現(xiàn)象都說明了提升系統(tǒng)在運行過程中,提升容器和提升鋼絲繩存在較為明顯的振動,影響系統(tǒng)的安全性和舒適性。 接著,分別給系統(tǒng)施加傳統(tǒng)PID控制器、魯棒控制器和自適應(yīng)魯棒控制器。在仿真中,為了驗證算法對未知系統(tǒng)參數(shù)下的控制效果,采用提升容器處阻尼系數(shù)和天輪處阻尼系數(shù)均為0.3,單根鋼絲繩容器及載物質(zhì)量為9 500 kg。 傳統(tǒng)PID控制器和筆者設(shè)計的自適應(yīng)魯棒控制器的控制參數(shù)如表2所示。 表2 摩擦式提升系統(tǒng)振動抑制控制參數(shù)Tab.2 Control parameters for vibration suppression of the frictional hoisting system 當(dāng)系統(tǒng)處于閉環(huán)狀態(tài)下運行時,即給系統(tǒng)分別施加PID控制器、魯棒控制器和自適應(yīng)魯棒控制器時,提升容器的縱向振動位移如圖6所示。圖7所示為自適應(yīng)魯棒控制器的控制輸入曲線。由圖6可以看出,傳統(tǒng)的PID控制器對容器的縱向振動已有較為明顯的補償和抑制,但是由于其沒有考慮提升鋼絲繩的彈性形變,容器的振動位移在開始階段還是有較大的偏移。當(dāng)采用魯棒控制器時,由于存在系統(tǒng)參數(shù)不一致的問題,使得系統(tǒng)在加速度突變點具有較強烈的高頻振動,且收斂較慢。采用筆者設(shè)計的自適應(yīng)魯棒控制器時,容器的振動位移偏移可以得到很好的補償,同時在加速度變化的時間點,自適應(yīng)魯棒控制器也比PID控制器和魯棒控制器均有更快的收斂速度,總體控制效果最好。鋼絲繩載重觀測誤差及阻尼觀測值如圖8所示。 圖6 不同控制策略下提升容器處的縱向振動Fig.6 Longitudinal vibration at the lifting container under different control strategies 圖7 自適應(yīng)魯棒控制策略控制輸入曲線Fig.7 Control input curve for adaptive robust control strategy 圖8 不確定參數(shù)觀測值及觀測誤差Fig.8 Uncertain parameter observations and observation errors 本研究針對深井提升系統(tǒng)鋼絲繩縱向振動問題,基于Lyapunov理論,提出了一種魯棒控制策略。通過對比仿真,驗證了所提算法相較于傳統(tǒng)PID算法能更好地補償振動偏移以及具有更快速的收斂性,整體效果良好。
2 振動抑制控制器設(shè)計











3 振動抑制仿真研究






4 結(jié)束語
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34中國公路(2017年18期)2018-01-23 03:00:38數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
