基于圖像識別的家用自動蒸汽熨燙裝置
2020-12-15 08:36:48李曉茜章煜佳農(nóng)苑櫻
科學技術(shù)創(chuàng)新 2020年36期
關(guān)鍵詞:變壓器
李曉茜 章煜佳 農(nóng)苑櫻
(臺州學院,浙江 臺州318000)
隨著科技的發(fā)展和生活進入小康時代,人們對衣著打扮更加注重,熨燙機逐漸成為家庭必備品之一。熨燙機能燙平褶皺,改善衣服外觀,塑造立體服裝效果。傳統(tǒng)熨燙機類型有電熨斗、掛燙機,以上熨燙機均需手動操作,在操作過程中存在安全性不高、操作難度大、操作費力等缺點。本文闡述的基于圖像識別的家用自動蒸汽熨燙裝置,能很好彌補上述缺點。它通過圖像識別技術(shù)、十字滑臺運動、蒸汽熨斗來實現(xiàn)蒸汽熨燙機的自動工作,解放人們的雙手。
1 工作原理
系統(tǒng)主要由單片機控制電路,十字滑臺及其驅(qū)動電路,攝像頭圖片采集模塊電路,照明電路,繼電器模塊電路,蒸汽熨斗等組成。系統(tǒng)原理框圖如圖1 所示。
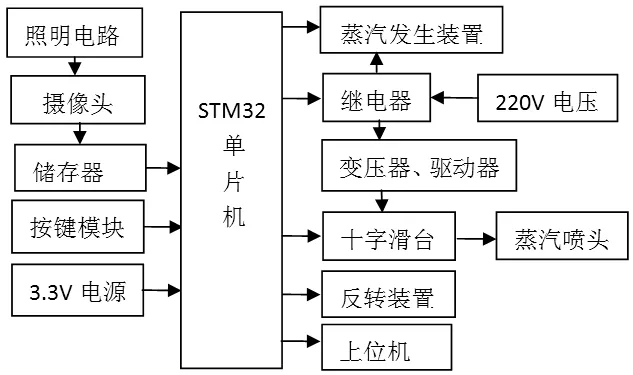
圖1 系統(tǒng)原理框圖
2 系統(tǒng)硬件設(shè)計
2.1 十字滑臺模塊
該模塊主要由變壓器、驅(qū)動器和十字滑臺構(gòu)成,三者與STM32 控制模塊的接法根據(jù)電平有效,可分為共陽極接法(低電平有效,將PUL+、DIR+、EN+連接到控制系統(tǒng)的電源上)和共陰極接法(高電平有效,PUL-,DIR-,EN- 連接到控制系統(tǒng)的地端)。具體接法如圖2 所示。
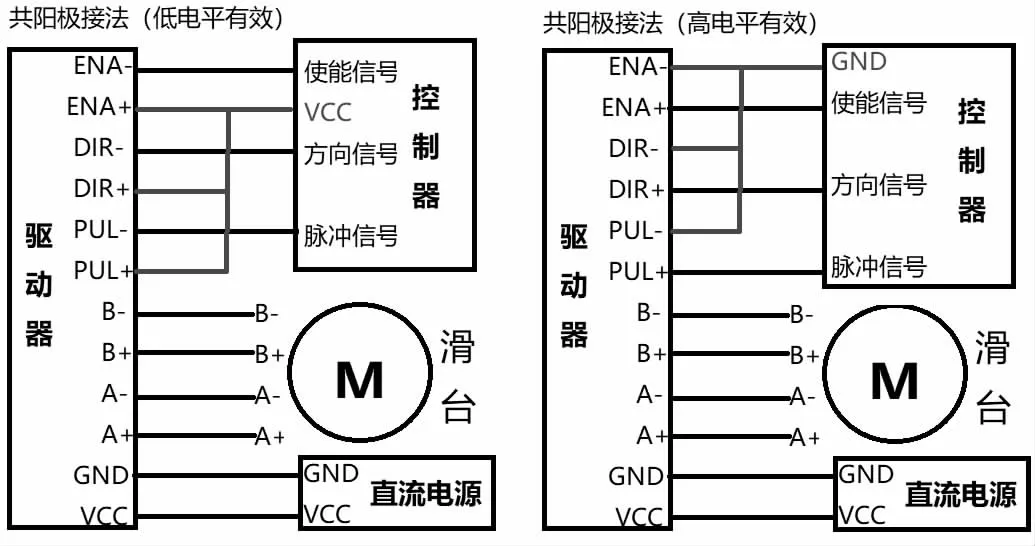
圖2 滑臺模組接線圖
2.1.1 變壓器。選用型號S-250-24 開關(guān)電源直流變壓器,將220V 交流電通過電源變壓器、整流電路、濾波器和穩(wěn)壓電路轉(zhuǎn)變?yōu)?4V 直流電,用于給驅(qū)動器提供24V 直流電。接線如圖3所示,最左端為輸出調(diào)節(jié),用于調(diào)節(jié)直流電壓的值;從左邊第一、三、五接線柱為直流輸出端的正極,左邊第二、四、六接線柱為直流輸出端的負極;左邊第七個接線柱接地線;第八和第九個接線柱分別接火線和零線。其中各選一個直流輸出端的正、負極接到驅(qū)動器的輸入端。

圖3 變壓器接口說明圖
2.1.2 驅(qū)動器。選用步進電機DM542 驅(qū)動器驅(qū)動滑臺,該驅(qū)動具有定位精度高,低速運行平穩(wěn),幾乎沒有振動和噪聲的特點。DM542 接口由信號接口、電源接口和機電接口組成。信號接口中,調(diào)整單片機STM32 的PWM,用于提供給PUL+和PUL-脈沖信號,從而控制步進電機的運行速度;用單片機的I/O 口連接DIR+和DIR-,來確定電機的正反方向;ENA+和ENA- 為使能信號的正端和負端。電源接口采用S-250-24 變壓器輸出的24V 直流電。電機接口的A+和A- 接步進電機A 相繞組的正負端;B+和B- 接步進電機B 相繞組的正負端。
2.1.3 十字滑臺。十字滑臺選用兩個梯形絲桿加線軌滑臺構(gòu)成X、Y 軸,該滑臺所用的電機為42 步進電機。STM32 分別設(shè)定X、Y 軸電機驅(qū)動器的PWM波脈沖時間和方向信號,從而改變X、Y 軸上的滑塊位移量與方向,控制熨燙蒸汽噴頭進行有一定軌跡的二維運動。本裝置所設(shè)定的運動軌跡為從左上角的滑塊在Y 軸方向往下進行熨燙,當?shù)竭_衣服下擺時,X 軸方向的滑塊向右移動熨燙蒸汽噴頭寬度大小的位移量,滑塊接著在Y軸方向向上移動,直到滑塊運行到最右下角,熨燙完成。根據(jù)衣服的常規(guī)長度,所選用的X 軸(寬)為500mm,Y 軸(長)為700mm。十字滑臺組合部分結(jié)構(gòu)如圖4 所示。
2.2翻轉(zhuǎn)裝置
翻轉(zhuǎn)裝置由ULN2003 步進電機驅(qū)動板與四相五線5V 步進電機構(gòu)成。該翻轉(zhuǎn)裝置用于翻轉(zhuǎn)衣服,使得衣服的正反面都能夠進行熨燙。翻轉(zhuǎn)的判斷條件為熨燙蒸汽頭的位置是否在最右下角,倘若在最右下角,則步進電機帶動衣架轉(zhuǎn)動180°,接著繼續(xù)按設(shè)定好的軌跡運動到左上角。
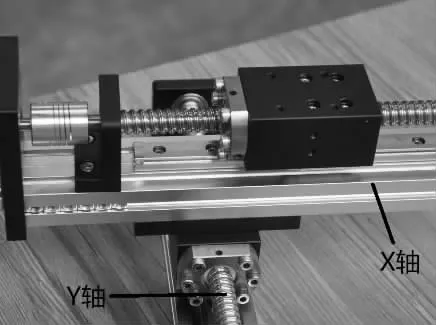
圖4 十字滑臺組合部位圖
2.3 圖像采集模塊
CMOS 攝像頭選用OV7670 作為圖像傳感器,OV7670 攝像頭通過SCCB 總線控制,可以輸出整幀、子采樣、取窗口等各種分辨8 位影像數(shù)據(jù),圖像最高達到30 幀每秒。選用大容量AL422B 作為采樣處理的共享數(shù)據(jù)RAM,把數(shù)據(jù)傳給STM32。在STM32 接收到數(shù)據(jù)之后,建立二維坐標,把采集到的圖像進行坐標定位;最后STM32 將分析后的信息進行相應(yīng)的處理,通過灰度值分析判斷衣領(lǐng)處和褶皺較多處。
2.4 繼電器模塊
選用2 路5V 繼電器,用于單片機開關(guān)按鍵控制蒸汽熨斗和變壓器與220V 交流電的通斷,為用電安全性提供保障。繼電器有高電平觸發(fā)和低電平觸發(fā)兩種觸發(fā)方式。繼電器的原理圖如圖5 所示。
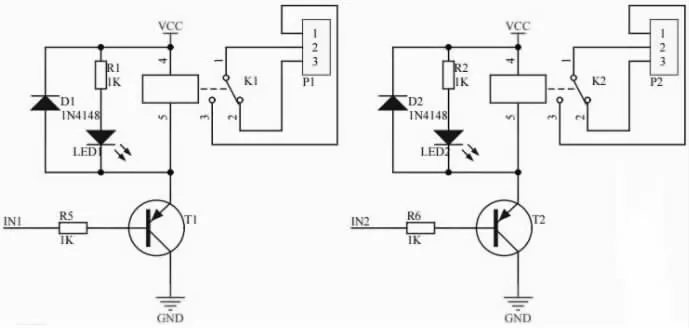
圖5 繼電器原理圖
2.5 STM32 主控模塊
芯片采用STM32F10x 系列,屬于32 位ARM控制器, 內(nèi)核是Cortex-M3。芯片內(nèi)部還集成了定時器、UART、SPI、I2C、USB等多種功能。選用STM32F103,其時鐘頻率可以達到72M,可輸出16 個PWM。
3 系統(tǒng)軟件部分設(shè)計
經(jīng)過測試,軟件程序與硬件系統(tǒng)能夠比較好的聯(lián)動起來;能夠?qū)崿F(xiàn)自動熨燙衣物,當通過攝像頭識別到褶皺或衣領(lǐng)處,十字滑臺會多次進行往返,達到深度熨燙效果,衣服整體熨燙效果明顯。系統(tǒng)的軟件流程如圖6 所示。
4 系統(tǒng)測試
本裝置的軟硬件設(shè)計完成后,分別需要對其各部分功能進行測試。本設(shè)計制作了一個簡易模型,翻轉(zhuǎn)裝置、滑臺、攝像頭模塊、蒸汽熨斗等均采用前文提到的各個模塊,用來模擬自動熨燙系統(tǒng)驗證各部分功能是否實現(xiàn)。在測試過程中,如果熨燙機在工作時突發(fā)狀態(tài)停止工作,則滑塊就不會停止在左上角,那么STM32 所設(shè)定的軌跡就無法再次運行。于是,修改程序,使每次開啟裝置時,滑塊都會初始化,移動到左上角。該自動熨燙系統(tǒng)整體框架如圖7 所示。
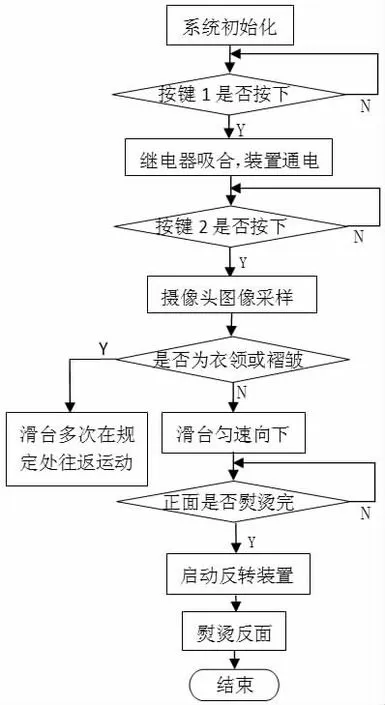
圖6 軟件流程圖
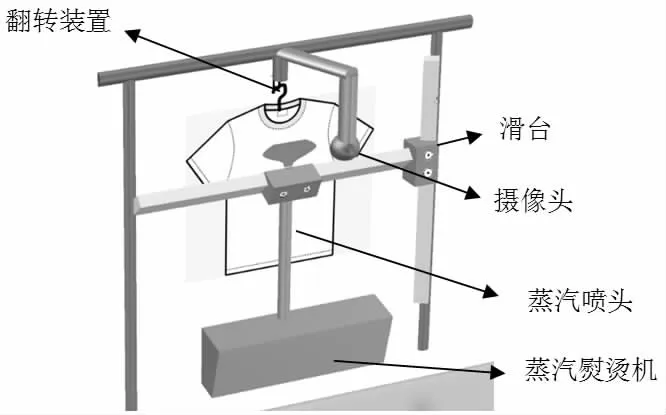
圖7 自動熨燙系統(tǒng)圖
5 結(jié)論
本文設(shè)計的自動熨燙裝置,能夠?qū)崿F(xiàn)自動熨燙衣服,可解放雙手,提高人們的生活效率和質(zhì)量。集智能化、人性化、自動化于一體;可移植性強,適用范圍廣;材料易得,成本低,便于大規(guī)模生產(chǎn);安裝、使用簡單,便于推廣,具有一定現(xiàn)實意義和開發(fā)價值。相信在未來的智能化時代,中國人的生活會更加便捷、美好。
猜你喜歡
商品與質(zhì)量(2021年43期)2022-01-18 05:30:32
中學生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
經(jīng)濟技術(shù)協(xié)作信息(2018年7期)2019-01-14 03:05:42
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年7期)2017-06-05 09:36:14
電子制作(2017年10期)2017-04-18 07:23:16
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(shù)(2016年3期)2016-03-26 07:13:46
