基于蟻群算法的碼垛機器人軌跡規劃方法研究
2020-12-23 08:30:12雷學鵬
黑龍江科學 2020年24期
雷學鵬
(廣西理工職業技術學院,廣西 崇左 532200)
0 引言
碼垛機器人可以進行多生產線作業,且作業占地面積較小、作業涉及范圍較大,能夠有效提高生產效率,減少人力物力成本。但是碼垛機器人在作業過程中,受場地環境中各種障礙物的影響,不能實現運動軌跡最短化,影響了操作效果。要對碼垛機器人進行運動軌跡規劃,使其有效躲避障礙物,從而實現作業效率與效果的最優化。
目前,已有大量研究人員對碼垛機器人軌跡規劃問題進行了研究。文獻[2]提出一種基于Matlab與DMC的工業機器人軌跡規劃方法,該方法運用Matlab建立了一個6自由度的仿真界面,通過該界面上設計機器人運動的矩形軌跡,得到機器人多關節的運動曲線。采用軌跡插補算法得出矩形軌跡的具體實現方式,從而完成機器人的軌跡規劃。分析實驗結果可知,該方法能預測機器人的運動軌跡,但是不能有效躲避路徑中的障礙物。文獻[3]提出一種基于Bezier曲線的移動機器人軌跡規劃方法,該方法依據Bezier曲線進行路徑規劃,以達到縮短路徑長度的目的,仿真結果雖然證明了該方法的有效性,但是該方法存在規劃用時較長的問題。
為解決上述方法存在的問題,提出一種基于蟻群算法的碼垛機器人軌跡規劃方法。
1 基于蟻群算法的碼垛機器人軌跡規劃方法
1.1 目標路段障礙物識別
由于碼垛機器人會在各種環境中進行作業,環境中的障礙物會對機器人的運動軌跡造成較大的影響,所以需要對目標路段中的障礙物進行識別。基于光纖傳感原理識別目標路段中的障礙物,光纖傳感器在工作過程中會發射出窄線寬光徑光束,該光束被分成兩束光,兩束光在光路中通過相反的方向進行傳播,在順時針方向中,在經過環形器到達耦合器后又會被分成兩路,接著兩路光會出現互相干涉現象,而干涉信號則會被光電探測器接收,因此順著逆時針方向進行光束傳輸,即可得到目標路段中障礙物的具體位置,從而實現障礙物的有效識別。
根據光纖傳感原理,識別目標路段的障礙物具體流程主要分為三步,描述如下所示:
第一,將多個障礙區樣本信息進行傅里葉轉換,可以得到工作環境中的障礙物的出現頻率f,則可以采用障礙物出現頻率f來檢測出障礙物所對應的端點位置[5]。
第二,將得到的障礙物端點位置信息傳輸至全相位濾波器中,計算出濾波輸出ug(n)的歸一結果,然后對整體障礙物數量進行計算,把該數值和f做綜合即可以提取出障礙物的多方位信息。
第三,將提取到的障礙物多方位信息反饋至耦合器中,通過計算即可對目標路段中的障礙物進行識別。
1.2 構建目標路段軌跡規劃模型
根據得到的目標路段障礙物識別結果,基于蟻群算法對碼垛機器人的軌跡進行規劃,構建碼垛機器人軌跡規劃模型。在模型中,通過蟻群算法尋找碼垛機器人運動軌跡的最優匹配序列。在最優匹配序列的尋找中需要將原碼垛機器人運動路段與碼垛機器人目標運動路段之間的形狀相似度視為蟻群信息單位,然后讓蟻群在兩個路段上行走。蟻群在行走過程中會在目標路段中不斷積累信息素,目標路段上積累的信息素越多,且該路段與原碼垛機器人運動路段的形狀相似度越高,則具備越高的匹配概率。
構建的碼垛機器人軌跡規劃模型的數學表達式如下所示:
(1)
式(1)中,Fi代表原碼垛機器人運動路段;Fj代表碼垛機器人目標運動路段;τ1代表螞蟻k在目標運動路段Fj上遺留的信息素,其可以通過公式(2)進行計算;τ2代表螞蟻k在原運動路段Fi上遺留的信息素,其可以通過公式(3)進行計算;S(Fi,Fj)代表原碼垛機器人運動路段與碼垛機器人目標運動路段之間的形狀相似度,即蟻群信息單位;m代表正常數;β代表原碼垛機器人運動路段與碼垛機器人目標運動路段之間的形狀相似度影響轉移概率的具體數值。
(2)
(3)
上式中,p代表蟻群中的螞蟻數量;χ代表蟻群信息素的實際揮發系數;ΔτFi代表螞蟻k選擇原碼垛機器人運動路段Fi時產生的實際信息素增量;ΔτFj代表螞蟻k選擇碼垛機器人目標運動路段Fj時產生的實際信息素增量,其可以通過公式(4)進行計算:
(4)
通過公式(4)的計算結果得出蟻群在目標路段中的運動軌跡,從而實現碼垛機器人運動軌跡的規劃。
2 仿真實驗驗證
2.1 實驗環境與參數設置
為驗證所提基于蟻群算法的碼垛機器人軌跡規劃方法的有效性展開實驗。選取某實際操作場景作為實驗區域,在該區域中設置不同類型、不同大小的障礙物共30個。本次測試在CloudSim云計算環境中進行,網絡帶寬為80 MI·S-1、內存為8 GB,并采用MATLAB軟件進行數據處理。
在上述實驗條件下,利用基于蟻群算法的碼垛機器人軌跡規劃方法在實驗區域內對碼垛機器人的運動軌跡進行規劃。在軌跡規劃實驗過程中獲取該方法的實際性能,具體包括軌跡規劃速度、軌跡規劃結果與最優軌跡之間的相似度以及目標路段中障礙物的識別準確率。軌跡規劃速度越快,軌跡規劃結果與最優軌跡之間的匹配度越高,目標路段中障礙物識別準確率越高,說明該方法的軌跡規劃性能越好。
2.2 實驗結果分析
在多次實驗下,得出基于蟻群算法的碼垛機器人軌跡規劃方法的軌跡規劃速度與文獻[2]方法和文獻[3]方法的對比結果,具體如圖1所示。
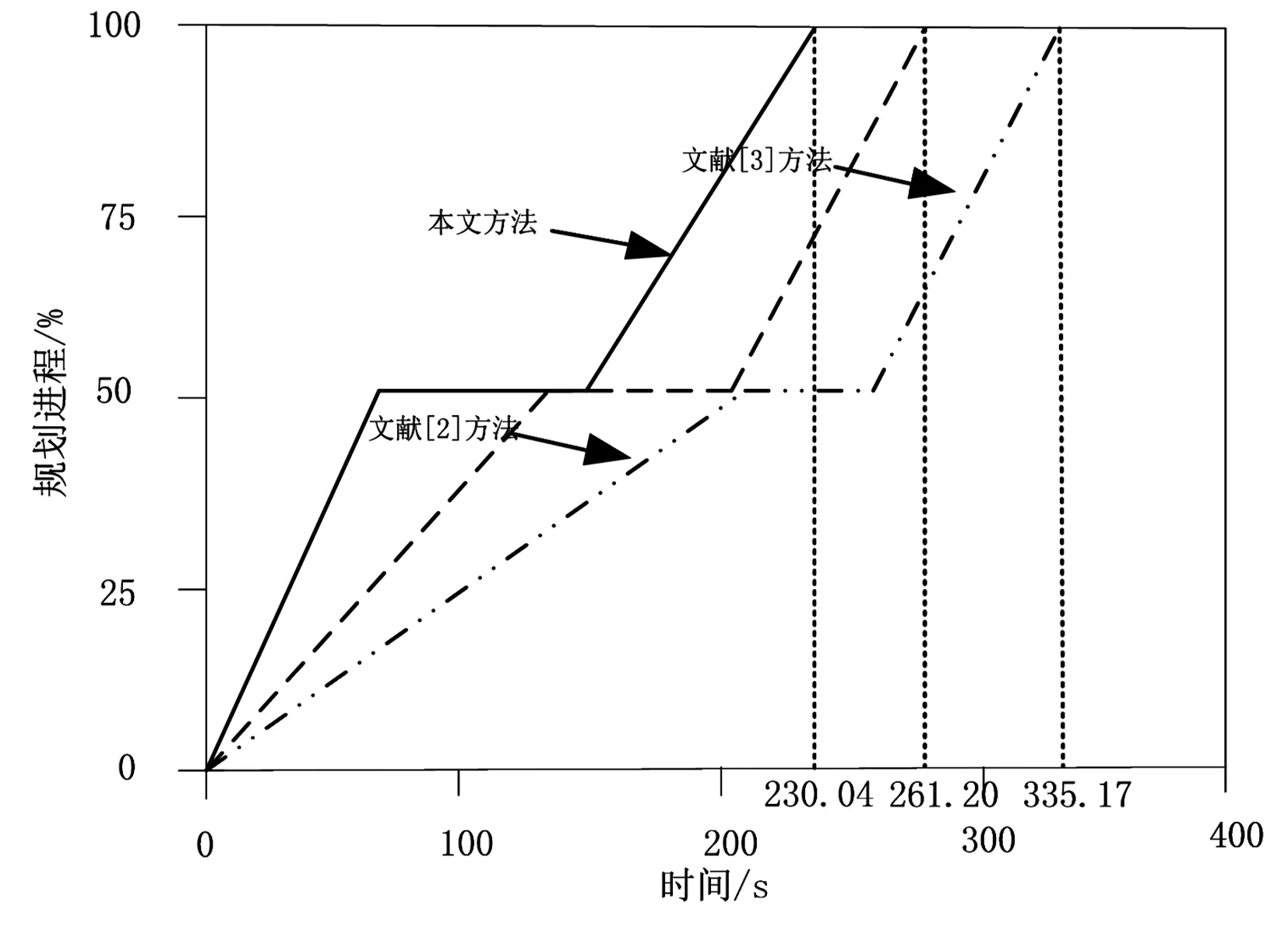
圖1 不同方法規劃速度對比結果Fig.1 Comparative result of planning speed of different methods
根據圖1所示的軌跡規劃速度實驗結果可知,基于蟻群算法的碼垛機器人軌跡規劃方法在230.04 s時完成了路徑匹配,而文獻[2]方法在261.20 s時完成軌跡規劃,文獻[3]方法在335.17 s時完成軌跡規劃。上述數據說明本研究方法用時較短,能夠滿足實際工程需求,這是由于本方法依據光纖傳感器工作原理對目標路段中的障礙物進行了識別,從而降低了軌跡規劃用時,提升了軌跡規劃效率。
將運用基于蟻群算法的碼垛機器人軌跡規劃方法得到的軌跡與文獻[2]方法和文獻[3]得到的軌跡與最優軌跡進行對比,結果具體如圖2所示。
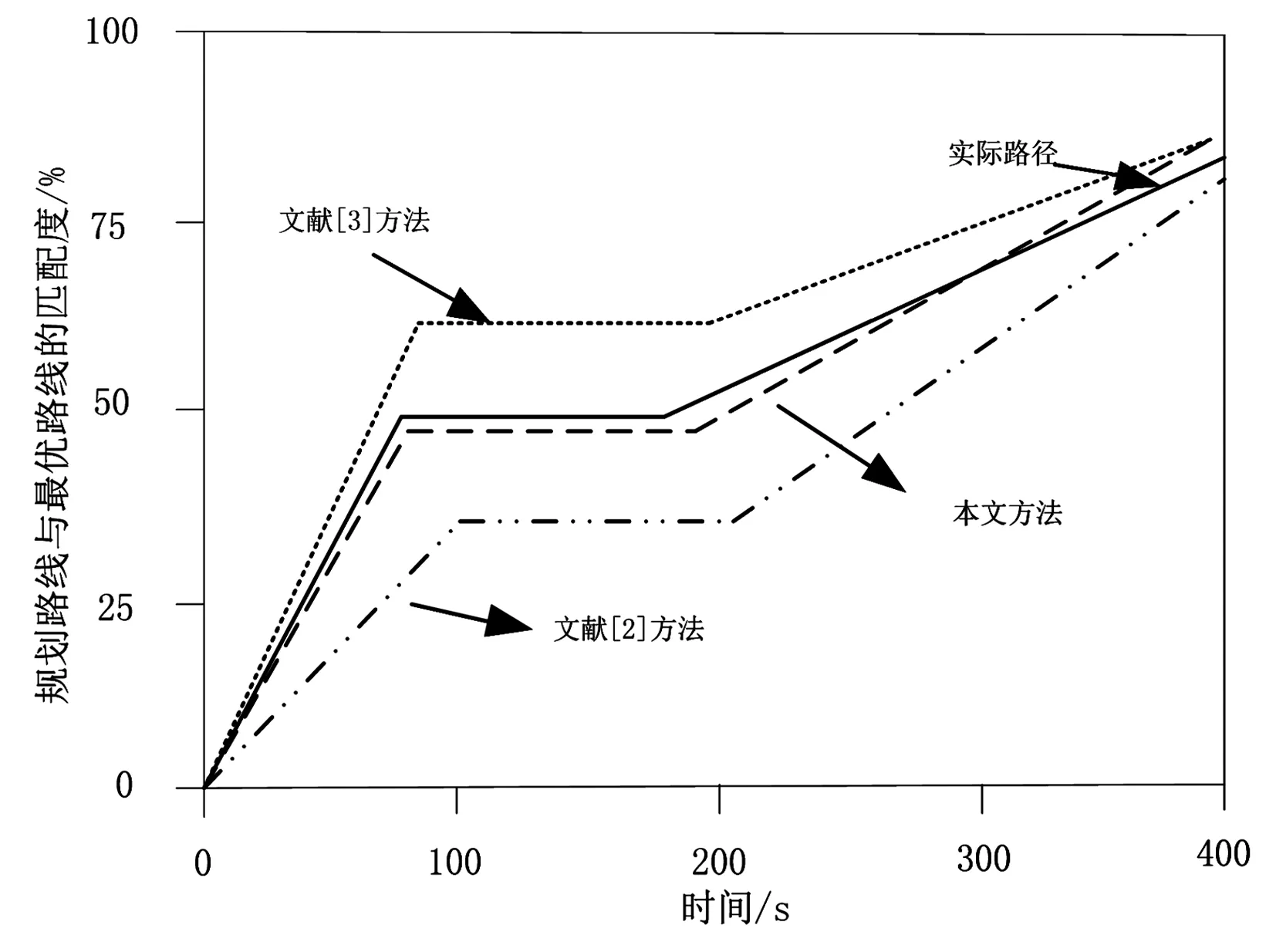
圖2 路徑匹配度實驗結果Fig.2 Experimental results of path matched degree
根據圖2的路徑匹配度實驗結果可知,基于蟻群算法的碼垛機器人軌跡規劃方法得出的規劃路徑與最優路徑的匹配度較高,甚至在部分路段中能夠實現完全擬合,說明運用本方法進行軌跡規劃得出的結果可靠性較高。
運用基于蟻群算法的碼垛機器人軌跡規劃方法與文獻[2]方法和文獻[3]方法進行目標路段中障礙物識別準確率對比,結果如圖3所示。
根據圖3所示的目標路段障礙物識別準確率測試結果可知,基于蟻群算法的碼垛機器人軌跡規劃方法的障礙物識別準確率明顯高于文獻[2]方法和文獻[3]方法,進一步驗證了該方法的可靠性,該方法實現了對碼垛機器人運動軌跡的準確規劃。
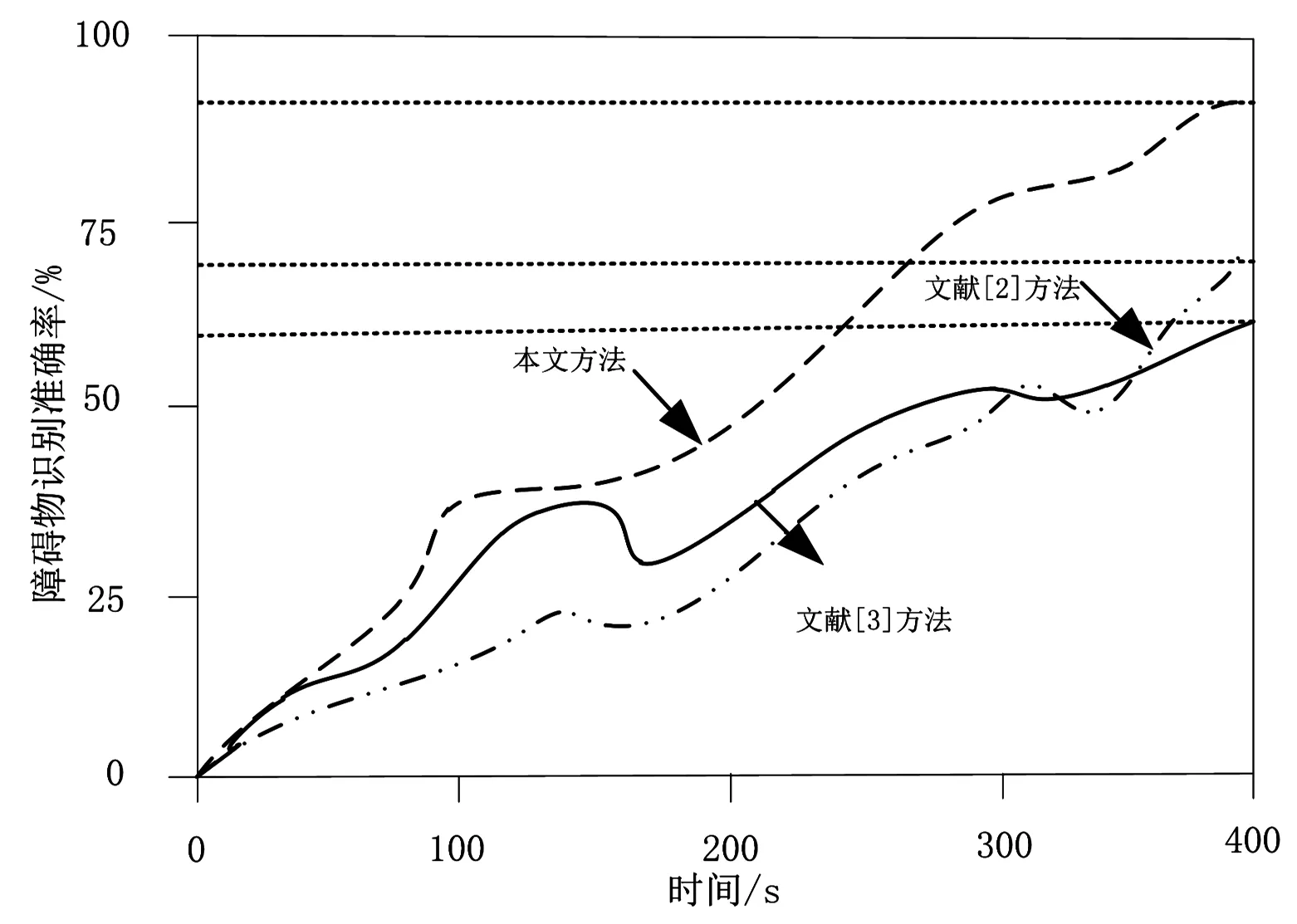
圖3 不同方法障礙物識別準確率對比結果Fig.3 Comparative results of barriers identification accuracy rate of different methods
綜上實驗結果可知,基于蟻群算法的碼垛機器人軌跡規劃方法的軌跡規劃速度、與最優路徑的實際匹配度、障礙物識別準確率均具有較高水平,即基于蟻群算法的碼垛機器人軌跡規劃方法的軌跡規劃性能較優。
3 結語
隨著碼垛機器人應用范圍越來越廣,需要研究一種方法對其運動軌跡進行合理規劃,從而進一步提升其應用價值。基于蟻群算法建立了目標路段軌跡規劃模型,通過該模型實現碼垛機器人運動軌跡的優化。實驗結果表明,該方法的規劃結果優于現有方法,具有更高的規劃效率與準確性,充分驗證了該方法具有較高的應用價值。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12