拖輪在協助靠離泊操作中的運用
2020-12-23 04:22:54孫永澤
中國水運 2020年11期
關鍵詞:船舶
孫永澤
摘 要:船舶的日益大型化,使拖輪的協助變得越來越常態化。通過拖輪協助操作的深入探討,使船舶靠離泊作業變得更加安全、高效。
關鍵詞:拖輪協助;靠離泊碼頭
中圖分類號:U675? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? 文章編號:1006—7973(2020)11-0119-02
縱觀拖輪的發展歷程,從單車、單舵的FPP型到CPP型,再到后來360度旋轉推進的VSP型和ZP型,最終以綜合性能占優的ZP型拖輪在我國各大港口得到廣泛的應用。為了保證靠離泊操作的安全性與高效性,拖輪的深入運用成為每個駕引人員的必修課。
下面根據不同的靠離泊情況對拖輪的協助操作進行分類探討。
1單拖輪協助離泊時
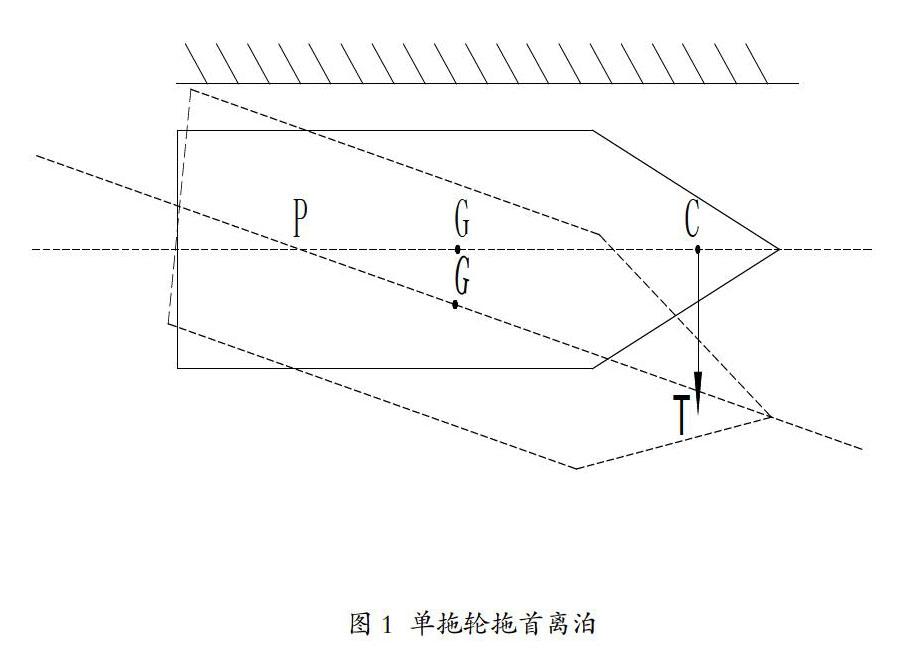
以常見的單拖輪拖首離泊為例,如圖1所示。
圖中,G為被協助船船舶重心,P為被協助船船舶轉心,C為拖輪作用點。
GP與GC的關系可表示為:GP≈(0.35L)2/GC。
由公式可知:當C點在G點附近時,P點在船尾的無窮遠處,船舶只有橫移而無旋轉。要使船舶旋轉,就應使C點盡量遠離G點。計算可知當CG=1/6L,即C點距離船頭位置約1/3L時,GP=1/2L即轉心P點正好在船尾。所以當C點在距離船頭位置1/3L-1/2L時,轉心P點在船尾和船尾方向的延長線上,在離泊過程中船舶上任一點的橫移方向是遠離碼頭的,能夠保證船舶的安全離泊。
在實際的單拖輪首離泊操作中,除了拖輪作用點位置的正確應用,駕引人員還應根據當時風、流情況,適時地合理運用被協助船的車舵來保證船尾與碼頭的安全距離。控制好轉頭速率是安全離泊的關鍵,過快的轉頭速率會導致拖輪無法保持拖力方向始終與被協助船保持垂直,而產生船舶首尾方向的分力,導致被協助船發生前沖或后縮的現象。
2雙拖輪協助離泊時
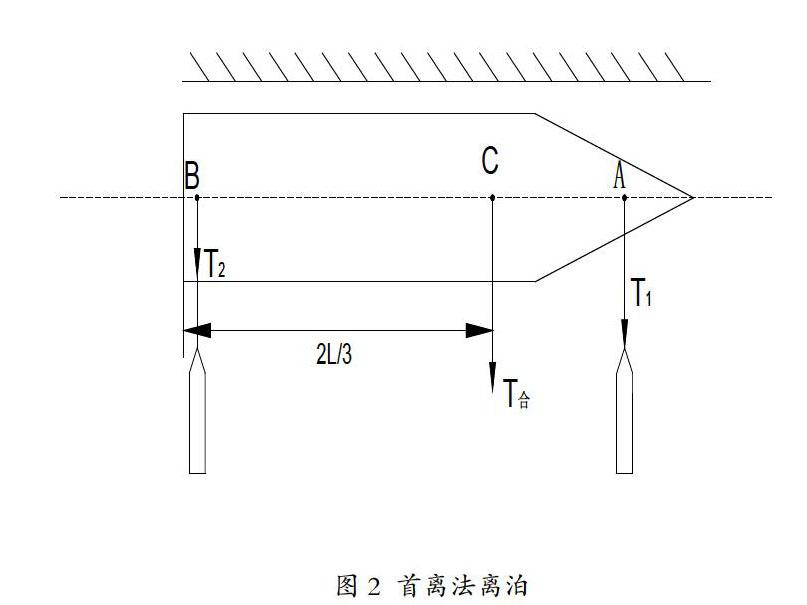
常規操作中,駕引人員會先使被協助船舶橫移出安全的橫距后,再進行首離泊操作。但有的泊位區域受限,需直接采用首離法,如圖2所示。
T1 為首拖力,A為作用點;T2為尾拖力,B為作用點;T合 為合力,C為合力作用點。
船首尾同時受拖力T1 和T2的作用時,根據力的合成與分解原理和公式GP≈(0.35L)2/GC的推導可知,當T合的作用點C在距船首1/3L-1/2L之間,轉心P點在船尾方向的延長線上,在整個離泊過程中船舶各點的橫移方向是與碼頭相反的,能夠保證船舶與碼頭無碰撞危險。
通過公式T合=T1+T2;AC/BC=T2/T1 的推導可知,為了使合力作用點C在離船首1/3L-1/2L的區間之內,從而船舶轉心P在船尾或船尾延長線上。需要滿足1/2≤T2/T1≤1,即船尾拖輪拖力小于船頭拖輪拖力,且大于等于1/2船首拖力。實際操作中,當被協助船船首轉出一定角度后,會將船尾拖輪拖力改為頂推船尾,來獲得更快的轉頭速率。值得注意的是,此時由于船尾受力方向的變化,轉心P會從船尾或船尾延長線上向船舶內部轉移,且船尾拖輪頂推力越大,轉心P離船頭越近。有些經驗不足的駕引人員會以駕駛臺到船尾距離作為衡量船舶與碼頭安全橫距的標準,錯誤之處在于主觀上把轉心P點放在了駕駛臺的位置。通常當被協助船首尾拖輪力方向不同時,轉心P都在駕駛臺之前,以駕駛臺到船尾距離作為衡量船舶與碼頭安全橫距的標準,會增加船舶與碼頭的碰撞危險。此時應配合被協助船的車和舵,根據旋轉速率和橫距變化的速率做出適時的調整,從而使離泊達到高效、穩定、安全的目的。
3單拖輪協助靠泊時
這種情況下,通常被協助船尺度較小,操作方法豐富多樣,可根據當時風、流、碼頭位置、船舶自身狀況所決定。
本港操作中,單拖輪船尾帶長纜起常規減速和應急操作的作用;船首拖外擋短錨起常規減速和方便離泊的目的。靠泊方式采用大角度,保持車舵配合靠泊,以外擋錨和船尾拖輪的減速效果代替傳統的停車淌航靠泊方法。以船首能帶纜繩作為安全距離的標準,最后以船尾拖輪調整被協助船船尾能帶纜繩作為初始靠泊工作的完成。
4多拖輪協助靠泊時
由于此類被協助船舶通常具有尺度大、吃水大、慣性大的特點,會采用頂風、頂流、首入泊角的方式靠泊,同時拖輪操作是安全靠泊操縱的重點。
下面主要從拖輪的三種主要操作進行探討:
4.1拖輪協助減速
由于船舶的大型化和航道與碼頭區域限制性的特點,停車與倒車減速已不能適應安全靠泊的要求,而主要的方式來自拖輪減速。拖輪減速方式多以平行減速為主,此時被協助船速度不宜超過5節,避免由于拖輪主機負荷過大而帶來主機受損的風險。另外,過大的纜繩負荷在有風浪的天氣中很容易發生斷纜的情況。值得注意的是,在減速過程中應盡量避免被協助船進行大角度的旋轉操作,從而使拖力的方向與被協助船產生夾角,降低拖輪減速的效果。
4.2拖輪協助旋轉靠泊
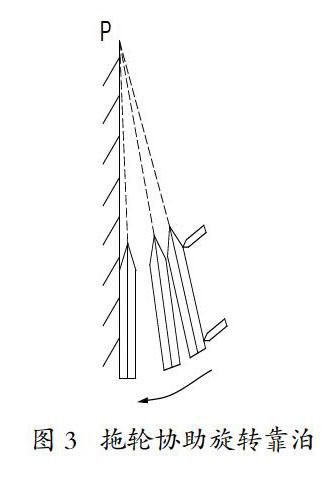
理想的靠泊模式如圖3所示:
通過對被協助船首尾拖輪頂推力大小的調整,達到以船首尾線與碼頭交點做為轉心P的旋轉靠泊操作,形成一種類似于“鐘擺”的運動軌跡。在實際的操作中,轉心P點應取在泊位之外,利用船舶首尾線與碼頭交點沿碼頭前后變化的規律,來合理利用拖輪協助。在旋轉靠泊的過程中,P點前移,說明船尾橫移速度相對過快,需要減小船尾的橫移速度或者加大船首的旋轉速度;P點后移,說明船首橫移速度相對過快,需要減小船首的橫移速度或者加大船尾的旋轉速度。需要注意的是,在靠泊過程中,應避免被協助船舶有過快的進速。因為在拖輪頂推靠泊過程中,除了主要的頂推功率外,還要分出一部分功率來維持拖輪與被協助船的垂直擺位,過快的船速就會發生為了保持垂直擺位而降低頂推功率的現象。另外,在拖輪的非垂直擺位下會產生縱向的分力,同時也會降低橫向推力效果,應盡量避免這種擺位不正的情況。拖輪擺位不正的因素通常有:拖輪駕駛員操作不當;風流或涌浪的影響導致上下顛簸或左右搖擺;拖輪頂推位置船體不平曲線較大等。但最主要的原因是被協助船速度過快,所以靠泊時應盡量保證船速為零。
4.3拖輪協助平貼泊位
靠泊最后的平貼操作主要依賴拖輪的協助來完成,且需要更加精準的操作。平貼泊位需要速度盡可能的小、角度盡可能的小,最好都是“零量”操作。如要達到“零量”靠泊,需要首尾拖輪調整拖力大小來實現。值得注意的是,即使是只有船首或船尾一端速度過快,也應該首尾拖輪同時備拖。根據首尾拖輪常規的帶纜位置和公式GP≈(0.35L)2/GC可知,當船首或尾一端受力時,會在重心G為中心的對應端的船身上形成轉心P點,從而導致此端的橫移速度被加快。如未提前做好備拖的準備,會發生操作不及時而此端碰撞碼頭的危險。
5結語
拖輪的合理、熟練、高效應用已經成為駕引人員的必修課。我們要通過對船舶操縱理論的不斷深入學習和實踐工作中的不斷總結形成一套適合自己的操作風格,為航運生產提供優質、安全、高效的服務。
參考文獻:
[1] 古文賢.船舶操縱[M].大連:大連海運學院出版社,1993.
[2] 施內克魯特.船舶水動力學[M].上海:上海交通大學出版社,1997.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30