衛(wèi)星對接捕獲的地面微重力驗證系統(tǒng)
2020-12-24 01:35:56楊海濤安升輝
機械與電子 2020年12期
豐 飛,楊海濤,安升輝
(1.江蘇集萃華科智能裝備科技有限公司,江蘇 無錫 214000;2.華中科技大學無錫研究院,江蘇 無錫 214000)
0 引言
近幾十年來,全世界每年都有各種類型的航天器(衛(wèi)星等)發(fā)射進入太空,同時,由于各種原因大量航天器也會發(fā)生失效或報廢,如某些組件失靈或燃料在完成其任務(wù)之前耗盡,這些情況往往會造成巨大的經(jīng)濟損失[1- 2]。基于上述原因,航天器在軌服務(wù)(在軌維修和在軌維護)具有非常廣泛的應(yīng)用需求,各國科學家都在圍繞這一主題開展相關(guān)關(guān)鍵技術(shù)研究。衛(wèi)星在軌服務(wù)正在成為航天工業(yè)領(lǐng)域中一個非常具有挑戰(zhàn)性和重大意義的課題和研究方向。
衛(wèi)星在軌對接捕獲操作是實現(xiàn)其在軌服務(wù)任務(wù)最關(guān)鍵的一步,對衛(wèi)星在軌服務(wù)任務(wù)來說至關(guān)重要。衛(wèi)星在軌服務(wù)的主要目的是實現(xiàn)其壽命延長、故障維修、在軌維護、在軌組裝和在軌燃料加注等空間任務(wù)。
2007年德國宇航局(DLR)提出了一項新的在軌維修任務(wù),被稱為“德國軌道服務(wù)任務(wù)”(DEOS)[3-4]。其主要目的是通過安裝在自由飛行服務(wù)衛(wèi)星上的機械臂系統(tǒng),來演示在軌交匯和捕獲翻滾的非合作目標衛(wèi)星的任務(wù)。德國宇航局的另一項在軌維修任務(wù)計劃是軌道壽命延長飛行器(OLEV)[5-7],該系統(tǒng)用于在軌維修正在遭受推進劑耗盡的對地靜止通信衛(wèi)星并延長其在軌使用壽命。美國國防高級研究計劃局(DARPA)資助了軌道快車項目,主要用于驗證搭載空間機械臂的服務(wù)衛(wèi)星進行航天器在軌維修任務(wù)的技術(shù)可行性,驗證內(nèi)容包括了衛(wèi)星在軌交匯、捕獲、維修、器件更換和補充燃料等空間技術(shù)[8-9]。日本成功發(fā)射了國際上第1個自由飛行空間機器人系統(tǒng)——“工程測試衛(wèi)星VII”任務(wù)(ETS-VII),這是世界上第1個配備了機械臂的衛(wèi)星,其發(fā)射成功是空間在軌服務(wù)的一個重要里程碑事件,極大推動了世界各國空間在軌服務(wù)項目的研究[10-11]。
1 衛(wèi)星對接系統(tǒng)及其動力學特性
1.1 衛(wèi)星對接系統(tǒng)
目前,在軌航天器絕大多數(shù)都是非合作目標衛(wèi)星,不具備在軌維修的專用捕獲或?qū)咏涌凇榱私鉀Q衛(wèi)星的對接或捕獲問題,需要預(yù)先確定衛(wèi)星對接或捕獲接口以設(shè)計專門的對接或捕獲工具。考慮到大多數(shù)衛(wèi)星上所具有的共性特征,衛(wèi)星的發(fā)動機噴嘴大小和形狀非常適合用作理想的衛(wèi)星對接或捕獲接口。
在軌服務(wù)衛(wèi)星的對接捕獲系統(tǒng)如圖1所示,該系統(tǒng)包括目標衛(wèi)星和服務(wù)衛(wèi)星。目標衛(wèi)星上是在軌服務(wù)任務(wù)的目標,其本身具有發(fā)動機噴嘴以及火箭對接環(huán),可以用作對接捕獲接口。服務(wù)衛(wèi)星用于執(zhí)行在軌服務(wù)任務(wù),其衛(wèi)星本體上安裝有太陽能帆板、全色高分辨率相機,以及專門針對目標衛(wèi)星發(fā)動機噴嘴而設(shè)計的對接捕獲機構(gòu)。
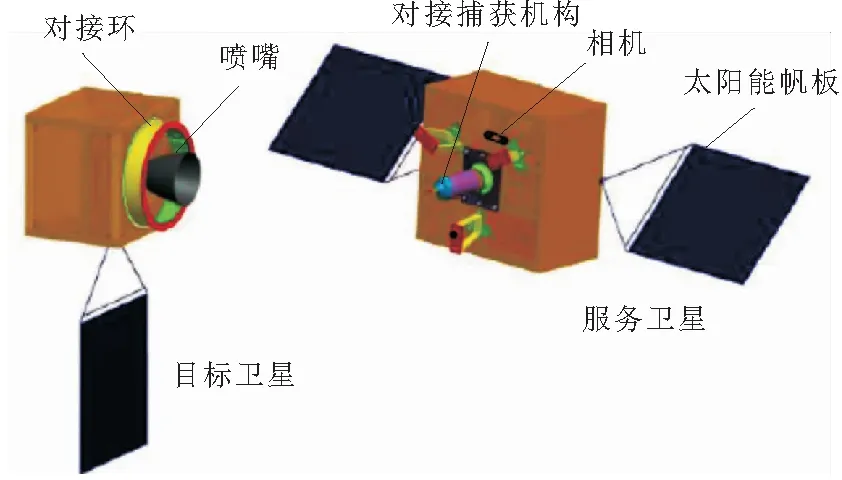
圖1 服務(wù)衛(wèi)星和目標衛(wèi)星系統(tǒng)
1.2 服務(wù)衛(wèi)星和目標衛(wèi)星對接捕獲動力學
為了簡化兩衛(wèi)星在軌對接捕獲過程中接觸碰撞的動力學分析,可以考慮將目標衛(wèi)星假定為自由漂浮的單剛體,暫時不考慮其軌道動力學。假設(shè)服務(wù)衛(wèi)星在對接捕獲過程中接觸碰撞單剛體目標衛(wèi)星。在接觸碰撞過程中,采用牛頓-歐拉方法分別建立服務(wù)衛(wèi)星和目標衛(wèi)星的動力學模型為:
(1)
(2)
MS和MT分別為服務(wù)衛(wèi)星和目標衛(wèi)星的廣義質(zhì)量矩陣;VS和VT分別為服務(wù)衛(wèi)星和目標衛(wèi)星的廣義速度矢量;FeS和FeT分別為服務(wù)衛(wèi)星和目標衛(wèi)星的廣義外力矢量;FfS為服務(wù)衛(wèi)星的科里奧利力、阻尼力和離心力等力矢量;FfT為目標衛(wèi)星的科里奧利力、阻尼力和離心力等力矢量;JS和JT分別為服務(wù)衛(wèi)星和目標衛(wèi)星的雅克比矩陣;FC為服務(wù)衛(wèi)星和目標衛(wèi)星在對接過程中由于碰撞沖擊引起的廣義力矢量。
2 衛(wèi)星對接捕獲地面驗證系統(tǒng)方案
衛(wèi)星對接捕獲的地面微重力驗證系統(tǒng),是用于驗證服務(wù)衛(wèi)星在太空中對接捕獲目標衛(wèi)星過程中運動狀況,目前采用硬件在環(huán)仿真方法來實現(xiàn)。該地面驗證系統(tǒng)的組成架構(gòu)如圖2所示,主要包括實際硬件結(jié)構(gòu)和軟件系統(tǒng)。該系統(tǒng)的實際硬件主要由2臺地面工業(yè)機器人、六維力/力矩傳感器、視覺相機、對接捕獲機構(gòu)、服務(wù)衛(wèi)星模擬器和目標衛(wèi)星模擬器組成。軟件主要包括重力補償、接觸動力學、末端運動學等效和衛(wèi)星的動力學模擬軟件等,主要用于模擬及計算服務(wù)衛(wèi)星和目標衛(wèi)星的在軌實際運動狀態(tài)。
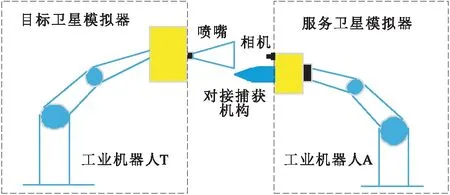
圖2 地面微重力驗證系統(tǒng)組成
衛(wèi)星對接捕獲的地面微重力驗證系統(tǒng)的實現(xiàn)方案如圖3所示。目標衛(wèi)星的運動模擬是通過工業(yè)機器人T的運動實現(xiàn)的。目標衛(wèi)星在自由空間運動可以按照在微重力環(huán)境下單剛體運動來進行運動軌跡規(guī)劃。當服務(wù)衛(wèi)星的對接捕獲機構(gòu)接觸碰撞到目標衛(wèi)星的噴嘴后,通過重力補償后,運動控制系統(tǒng)將接觸力和力矩信息,以及目標衛(wèi)星運動信息傳遞給目標衛(wèi)星動力學模擬器,目標衛(wèi)星動力學模擬器將其運動狀態(tài)通過工業(yè)機器人末端對目標衛(wèi)星的運動學等效,計算得到工業(yè)機器人末端的運動狀態(tài)。最后通過工業(yè)機器人T的逆運動學得到其關(guān)節(jié)伺服運動信息,從而通過工業(yè)機器人T的運動實現(xiàn)對目標衛(wèi)星的運動模擬。
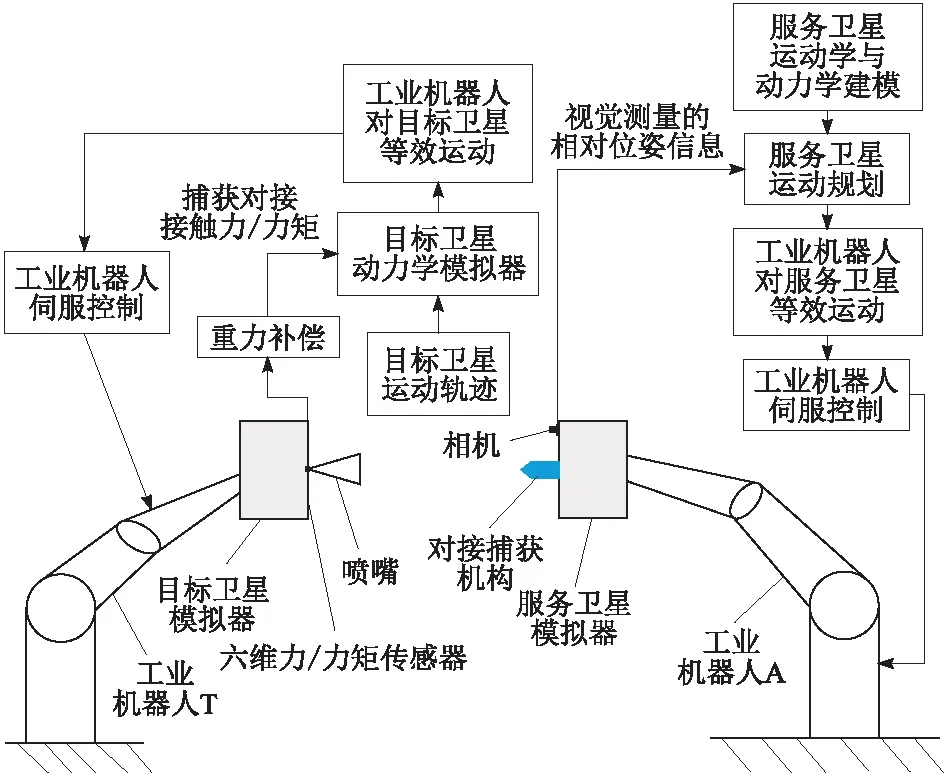
圖3 地面微重力驗證系統(tǒng)方案
服務(wù)衛(wèi)星的運動模擬是通過工業(yè)機器人A的運動來實現(xiàn)的。服務(wù)衛(wèi)星通過視覺相機測量服務(wù)衛(wèi)星的對接捕獲機構(gòu)相對于目標衛(wèi)星的火箭發(fā)動機噴嘴的位姿信息,將相機測量的相對位姿信息通過服務(wù)衛(wèi)星的運動學規(guī)劃和動力學模擬計算,得到服務(wù)衛(wèi)星的運動信息。同樣,通過運動學等效實現(xiàn)工業(yè)機器人A末端對服務(wù)衛(wèi)星的運動模擬,得到工業(yè)機器人A末端的運動狀態(tài)。通過工業(yè)機器人A的逆運動學得到其關(guān)節(jié)伺服運動信息,從而通過工業(yè)機器人A的運動實現(xiàn)對服務(wù)衛(wèi)星的運動模擬。
3 坐標系轉(zhuǎn)換及運動學等效
在地面微重力驗證系統(tǒng)中,非常關(guān)鍵的一步是將兩衛(wèi)星在太空中的運動與工業(yè)機器人末端在地面上的運動進行運動學等效。
運動學等效實現(xiàn)的基礎(chǔ),是將衛(wèi)星在太空的慣性坐標系和地面工業(yè)機器人的基坐標系進行坐標系轉(zhuǎn)換。坐標系轉(zhuǎn)換示意如圖4所示。

圖4 坐標系轉(zhuǎn)換示意
為推導(dǎo)工業(yè)機器人基坐標系與服務(wù)衛(wèi)星慣性坐標系的轉(zhuǎn)換關(guān)系,設(shè)定工業(yè)機器人A的末端坐標系與服務(wù)衛(wèi)星對接捕獲機構(gòu)的末端坐標系相重合,則有
OAE=OSE
(3)
OAE為工業(yè)機器人A的末端坐標系;OSE為服務(wù)衛(wèi)星對接捕獲機構(gòu)的末端坐標系。
通過式(3)推導(dǎo)出工業(yè)機器人基坐標系與服務(wù)衛(wèi)星慣性坐標系的轉(zhuǎn)換矩陣為
OAB=OSI·STTSE·(ABTAE)-1
(4)
OSI為服務(wù)衛(wèi)星的慣性坐標系;OAB為工業(yè)機器人A的基坐標系;SITSE為服務(wù)衛(wèi)星從慣性坐標系到對接捕獲機構(gòu)末端坐標系的轉(zhuǎn)換矩陣;ABTAE為工業(yè)機器人A從基坐標系到末端坐標系的轉(zhuǎn)換矩陣。
同理,可以獲得目標衛(wèi)星與工業(yè)機器人T的坐標系轉(zhuǎn)換關(guān)系。
服務(wù)衛(wèi)星與工業(yè)機器人A的運動學等效過程如下:首先得到當前服務(wù)衛(wèi)星相關(guān)的位姿及運動狀態(tài)信息,然后通過運動學轉(zhuǎn)換得到對接捕獲機構(gòu)末端在工業(yè)機器人末端的等效位姿信息,最后利用工業(yè)機器人運動學逆解,得到等效的工業(yè)機器人關(guān)節(jié)角指令,從而實現(xiàn)對工業(yè)機器人A的運動控制。即通過運動學等效保證服務(wù)衛(wèi)星和工業(yè)機器人A在操作空間的位姿是等同的。
同理,可以實現(xiàn)目標衛(wèi)星與工業(yè)機器人T的運動學等效。
4 衛(wèi)星對接捕獲地面驗證系統(tǒng)的建立
為了模擬在太空微重力環(huán)境下兩衛(wèi)星對接捕獲的接觸碰撞過程,搭建了基于硬件在環(huán)的衛(wèi)星對接捕獲地面微重力驗證系統(tǒng)。該地面微重力模擬驗證系統(tǒng)主要由2臺六自由度工業(yè)機器人、六維力/力矩傳感器、目標衛(wèi)星模型、目標衛(wèi)星噴管、服務(wù)衛(wèi)星模型、對接捕獲機構(gòu)(對接裝置)、衛(wèi)星動力學模擬器、ABB工業(yè)機器人IRC5控制柜和中央控制計算機等組成。
2臺6自由度ABB工業(yè)機器人的末端分別安裝服務(wù)衛(wèi)星模型和目標衛(wèi)星模型,分別用于模擬服務(wù)衛(wèi)星和目標衛(wèi)星在太空微重力環(huán)境下的三維空間對接捕獲過程的運動狀況。目標衛(wèi)星噴嘴連接六維力/力矩傳感器安裝在目標衛(wèi)星模型上,對接捕獲機構(gòu)安裝在服務(wù)衛(wèi)星模型上,通過對接捕獲機構(gòu)可以實現(xiàn)服務(wù)衛(wèi)星對目標衛(wèi)星噴嘴的對接捕獲操作。動力學模擬器主要用于計算衛(wèi)星在接觸碰撞后的運動狀態(tài)。ABB工業(yè)機器人IRC5控制柜用于實現(xiàn)2臺6自由度工業(yè)機器人末端的運動控制。中央控制計算機負責整個系統(tǒng)的通信和運動控制。
衛(wèi)星對接捕獲驗證系統(tǒng)的中央控制計算機與工業(yè)機器人1和工業(yè)機器人2的控制器之間,采用TCP/IP通信進行數(shù)據(jù)和相關(guān)信息的傳輸;同樣,與視覺處理計算機、衛(wèi)星動力學模擬計算機、對接捕獲機構(gòu)控制計算機之間也采用TCP/IP通信。中央控制器與六維力/力矩傳感器之間采用PCI總線通信。對接捕獲機構(gòu)計算機與對接捕獲機構(gòu)采用點到點串口通信總線(PPSeCo),如圖5所示。
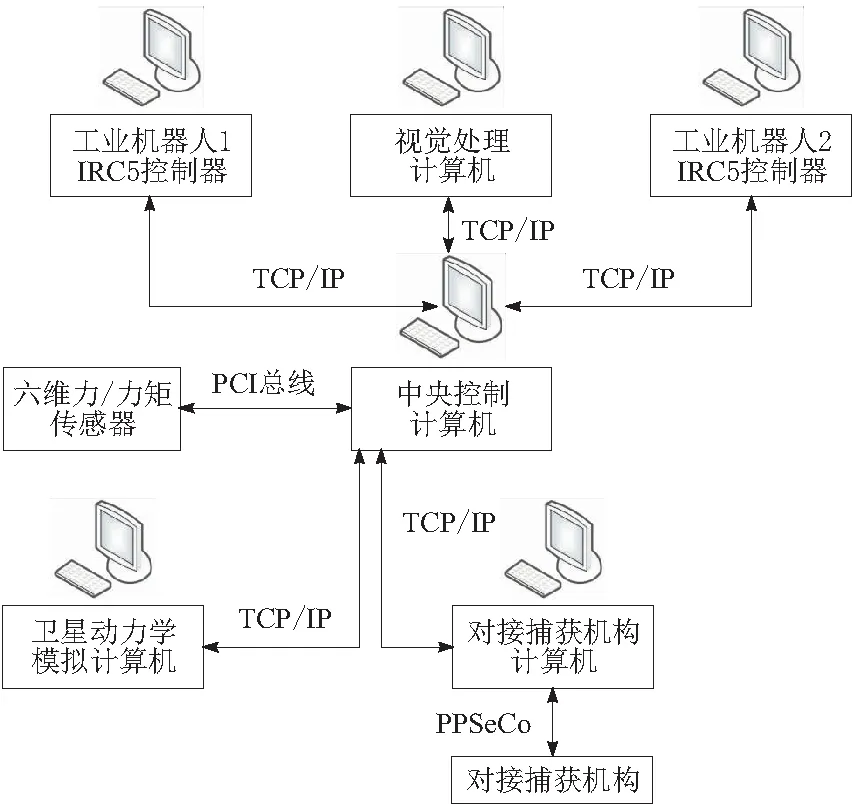
圖5 地面微重力驗證系統(tǒng)各功能模塊間的通信
5 衛(wèi)星對接捕獲地面驗證實驗
在地面三維微重力驗證實驗中,六維力/力矩傳感器安裝在火箭發(fā)動機噴嘴與目標衛(wèi)星模型之間。通過該傳感器可以實時測量在兩衛(wèi)星捕獲對接過程中的接觸力/力矩信息,通過零力控制來實現(xiàn)在太空中微重力環(huán)境下,目標衛(wèi)星與服務(wù)衛(wèi)星在接觸碰撞過程中的自由漂浮運動狀態(tài)模擬。
在對接捕獲實驗過程中,首先通過視覺相機伺服引導(dǎo)服務(wù)衛(wèi)星模型上的對接捕獲機構(gòu)接近目標衛(wèi)星模型上的火箭發(fā)動機噴嘴機構(gòu)。
當服務(wù)衛(wèi)星的對接捕獲機構(gòu)和目標衛(wèi)星的噴嘴接觸碰撞后,目標衛(wèi)星這邊的工業(yè)機器人T根據(jù)六維力/力矩傳感器測量的力/力矩信息,通過零力控制來實時調(diào)整工業(yè)機器人T末端的運動狀態(tài)。
圖6給出了服務(wù)衛(wèi)星模型上的對接捕獲機構(gòu)與目標衛(wèi)星模型上的噴嘴,在對接捕獲過程中的接觸力/力矩信息。圖6中,F(xiàn)x、Fy和Fz分別為兩衛(wèi)星對接捕獲在x、y、z3個方向測量的實際接觸力;Tx、Ty和Tz分別為繞x軸、y軸和z軸測量的實際接觸力矩。由圖6中可以看出,在接觸碰撞最劇烈的情況下,碰撞的接觸力基本上保持控制在±20 N之內(nèi),接觸力矩基本上保持控制在±100 N·m之內(nèi),在后期對接捕獲完成后,接觸力/力矩基本都接近0。這說明在服務(wù)衛(wèi)星在對接或捕獲目標衛(wèi)星過程中,碰撞的接觸力/力矩是可控的。服務(wù)衛(wèi)星可以成功地實現(xiàn)在太空微重力環(huán)境下對自由漂浮目標衛(wèi)星的對接捕獲操作。
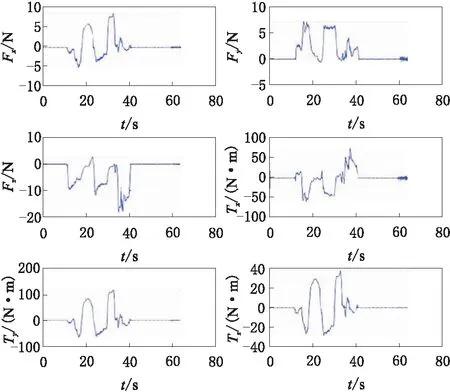
圖6 兩衛(wèi)星對接捕獲的接觸力/力矩
服務(wù)衛(wèi)星和目標衛(wèi)星的對接捕獲地面微重力驗證實驗如圖7所示。通過該地面驗證系統(tǒng),在圖7a中模擬再現(xiàn)了兩衛(wèi)星在軌對接捕獲前的初始狀態(tài),在圖7b中模擬再現(xiàn)了兩衛(wèi)星對接捕獲后的最終狀態(tài)。

圖7 衛(wèi)星對接的地面驗證實驗
6 結(jié)束語
本文研制開發(fā)了一套在太空中兩衛(wèi)星對接捕獲操作的地面微重力驗證實驗系統(tǒng)。在該系統(tǒng)中,2個地面固定基座工業(yè)機器人采用運動學等效和動力學模擬的方法,來分別模擬服務(wù)衛(wèi)星和目標衛(wèi)星在太空微重力環(huán)境下的運動狀況。該系統(tǒng)可以驗證兩衛(wèi)星在對接捕獲過程中的接觸碰撞情況以及運動狀態(tài)。通過地面微重力驗證系統(tǒng)的實驗結(jié)果,說明了服務(wù)衛(wèi)星可以成功地在軌對接捕獲目標衛(wèi)星。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
今日農(nóng)業(yè)(2019年14期)2019-09-18 01:21:54
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年15期)2019-01-03 12:11:33
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20