反輻射無人機對抗雷達誘餌陣方法研究
2020-12-25 02:27:38李陸軍潘竟峰高洪波
雷達與對抗 2020年3期
關鍵詞:信號
潘 奎,李陸軍,潘竟峰,高洪波
(空軍預警學院 雷達士官學校,武漢 430019)
0 引 言
反輻射無人機是一種以電磁波導引的攻擊地面雷達和其他無線電設備的新型武器,其原理與反輻射導彈相似,即利用目標雷達的電磁波作為制導信息,自動搜索并發現目標,進行主動攻擊,實施摧毀。[1]雷達配備誘餌是對抗反輻射摧毀的一種有效方法。誘餌輻射信號與雷達信號在時域、空域、頻域、能量域、碼域、極化域中相近甚至重合。[2]常用對抗誘餌系統方法有3種[3-5]:復合制導技術、窄波束天線和高分辨測向。這些方法主要是通過提高導引頭的測向精度和角度分辨力,使反輻射導引頭盡早地分辨出雷達和誘餌。但是,復合制導技術實現難度較大,窄波束天線難以滿足導引頭視場要求,高分辨測向算法受無人機導引頭大小限制,分辨力和測角精度不夠。文獻[6]提出了采用極化域-空域聯合估計的算法,利用極化參數來鑒別雷達與誘餌,達到抗誘偏的目的。但是,有源誘偏系統誘偏模式多樣,尤其是對于雷達配備多部閃爍誘餌,上述方法難以實現雷達與誘餌以及誘餌間的信號分選,對于已經定型的反輻射武器來講實現難度更大。本文結合反輻射無人機與誘餌作戰特點,從技術升級和戰術運用的角度提出基于空間誘偏區和測向偏差角來分選出某一部誘餌的方法。
1 雷達誘餌誘偏機理分析
實際應用中,考慮到誘偏效果、誘餌安全以及成本等因素,有源誘餌的個數以3個為宜,即誘偏系統由1部被保護雷達和3個有源誘餌組成。[7-8]雷達誘餌通過接收雷達的激勵信號及工作模式轉變信號輻射出與雷達相同的誘餌信號,并能與雷達保持同步模式。
以脈沖壓縮雷達為例,雷達與誘餌發射信號模型為[9]
(1)
以3部誘餌的誘偏系統為例(如圖1所示),雷達誘餌k(k=1,2,3)與無人機導引頭存在一定空間距離Rk:
(2)
其中,無人機空間坐標為A=[xyz]T,輻射源的空間坐標為D=[xkykzk]T。由于空間存在一定的傳播距離,誘餌信號到達導引頭時還存在信號傳播延遲時間Δt1k:
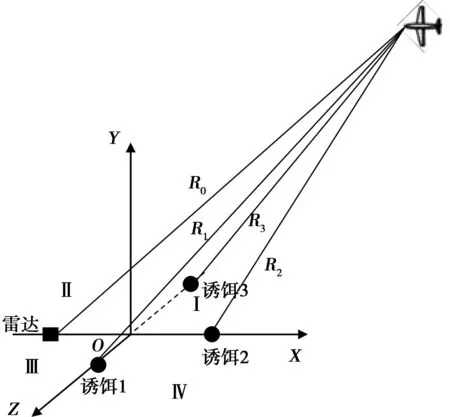
圖1 無人機與誘餌空間位置示意圖
(3)
同時,雷達誘餌還可以控制發射時序,使不同誘餌相對雷達信號存在一定的時間延遲Δt2k。那么,第k部誘餌的信號到達導引頭時相對雷達信號的總時間延遲Δtk為
Δtk=Δt1k+Δt2k
(4)
因此,導引頭接收到的誘餌k(k=1,2,3)的信號為
(5)
其中,ω0為載頻,τk為信號脈沖寬度,T0為信號重復頻率。不同誘餌信號到達導引頭時的傳播時間差為
Δtij=|Δti-Δtj|,i=1,2,3;j=1,2,3;i≠j
(6)
通常,誘餌信號脈沖寬度τk比雷達信號τ0寬,而且誘餌信號脈沖前、后沿比雷達信號寬得多,寬度達幾微秒,以保證誘餌信號更好地覆蓋雷達信號。
導引頭大多采用脈沖前沿采樣跟蹤體制[10]。它將對脈沖前沿靠前的誘餌信號進行采樣處理。3誘餌誘偏系統能始終確保誘餌信號首先被導引頭采樣跟蹤。
假設無人機被動雷達導引頭前沿采樣時間為Δμ。如果不同的誘餌信號到達導引頭的時間差Δtij>Δμ時,誘餌將被導引頭鑒別出來。如果通過控制雷達誘餌信號發射時序Δt1k,彌補空間距離差引起的傳播時間差Δt2k,可以實現質心誘偏,如圖2所示。
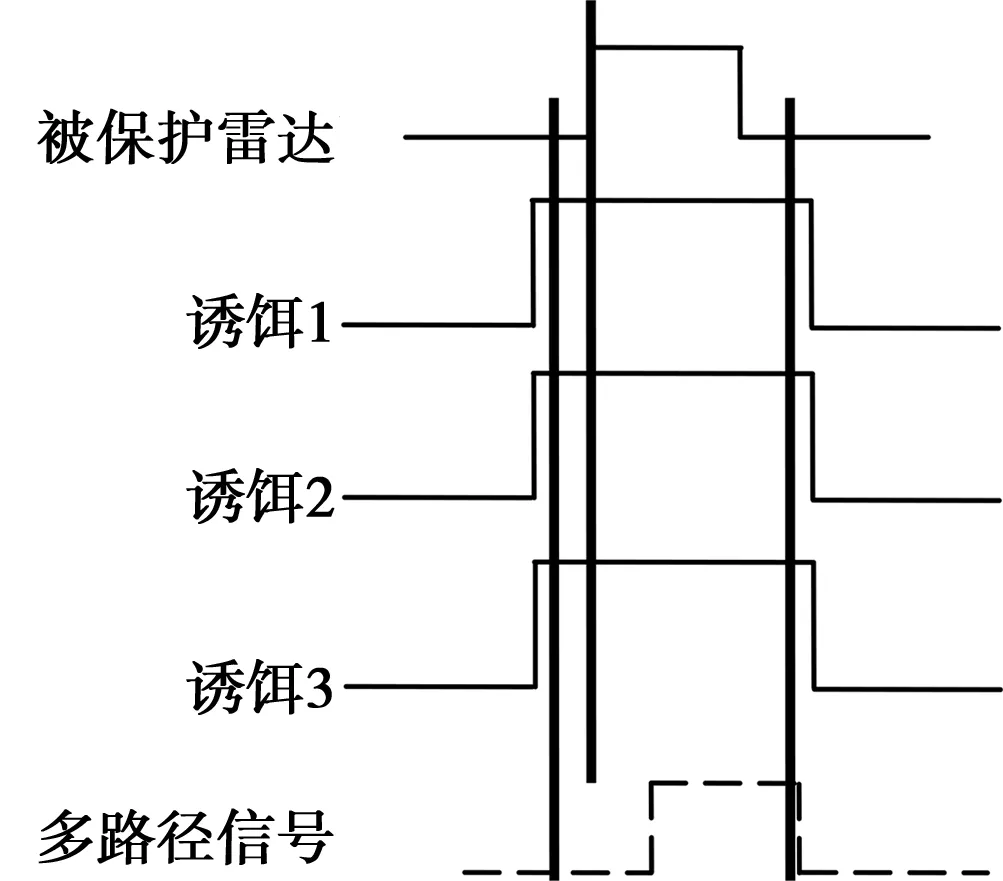
圖2 質心誘偏示意圖
對于質心誘偏,需要準確測出反輻射武器的空間位置,對抗無人機集群作戰技術實施難度較大。通過控制雷達誘餌信號的發射時序,使雷達誘餌工作在同步閃爍模式。該模式實現相對容易,是誘餌的典型工作模式之一。它比恒功率誘餌更能對單脈沖雷達導引頭實施有效的角度欺騙,達到顯著的誘偏效果。[11]如圖3所示,誘餌間存在嚴格的時間同步關系,按照時間間隔τ的依次交替領先。為確保雷達絕對安全,在任一時刻誘餌信號都“包裹”雷達信號同步輻射。[12]
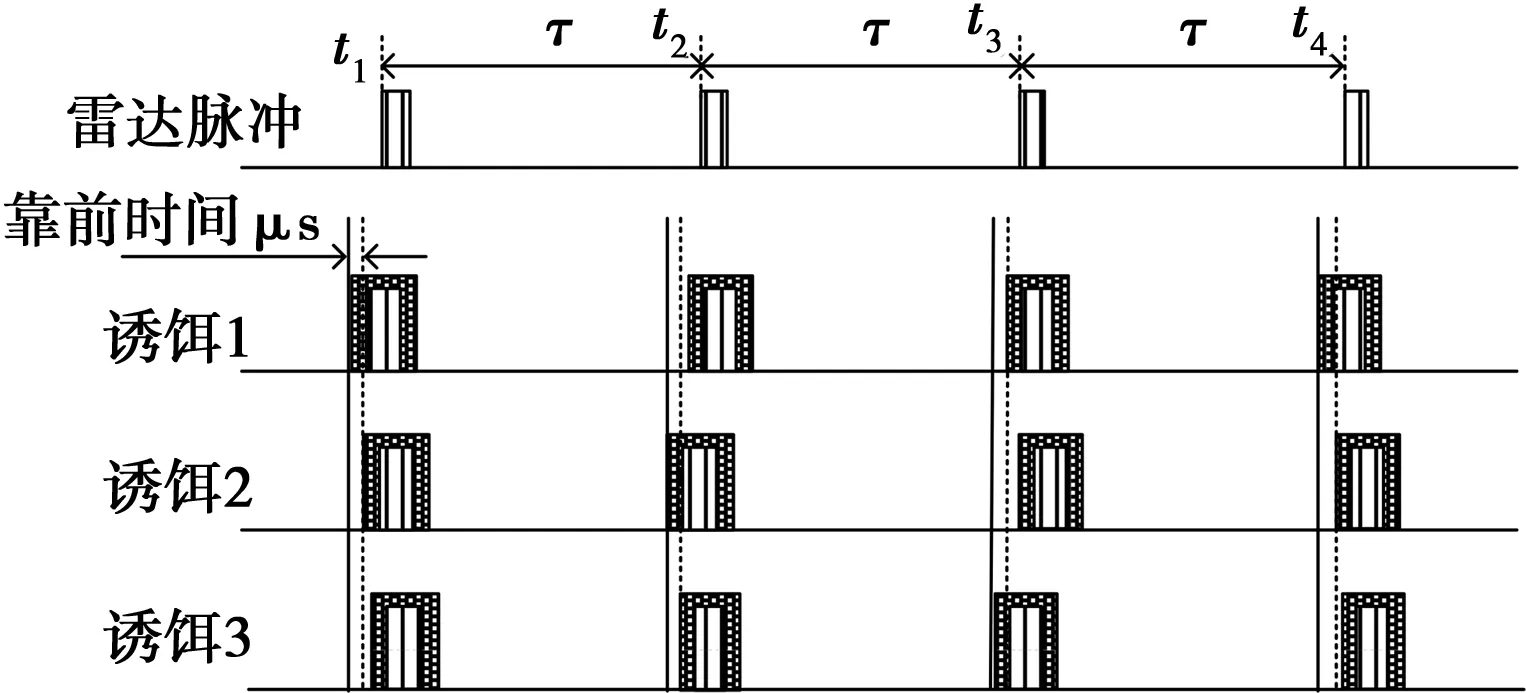
圖3 雷達誘餌的閃爍時序圖
在閃爍模式下,前沿采樣導引頭只對最先到達的誘餌信號進行采樣、測向。3誘餌交替靠前閃爍方式可以等效為3誘餌源周期性地交替發射誘偏信號(如圖4所示)。在任意時刻等效為只有1個誘餌源輻射信號,其他誘餌信號可認為處于信號發射間歇期,即不發射信號。誘餌間的交替靠前時間間隔為τ,3部誘餌完成1次前沿交替靠前的時間為T=3τ,它也是誘餌系統的閃爍周期。
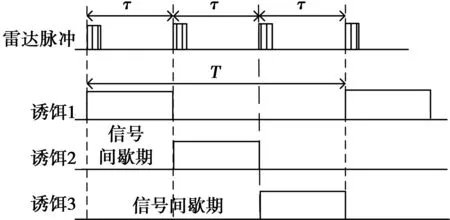
圖4 誘餌同步閃爍時序簡化圖
假設t=0時刻,雷達誘餌開始工作,其閃爍時序為
(7)
其中,n=0,1,2,…;T=3τ。
2 導引頭對誘餌的測角分析
比相體制導引頭使用5個天線陣元構成相互垂直的兩對干涉儀天線,分別位于導引頭天線陣的方位面和俯仰面,其空間位置如圖5所示。陣元天線在同一平面且呈長短基線分布。圖5中,θx、θy和θz為目標視線(目標M與天線C0的連線)與Xp、Yp和Zp軸夾角。那么,目標來波方向在天線陣水平面OXPZP的投影OE與天線橫軸的夾角α為方位面偏差角。目標來波方向在天線陣俯仰面OYPZP上投影OD與OP的夾角β為俯仰面偏差角。
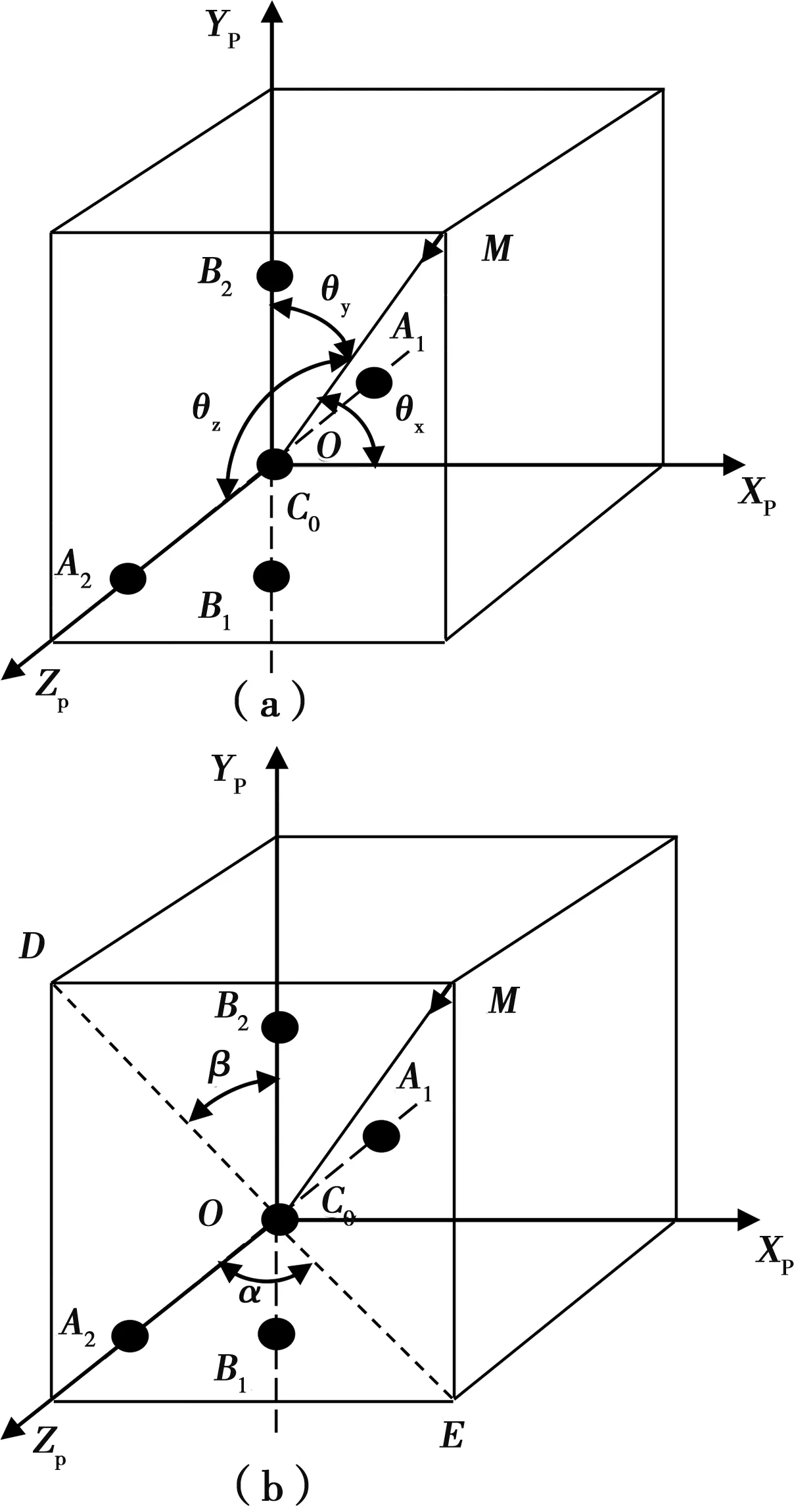
圖5 干涉儀天線空間位置(a)及角度關系(b)示意圖
圖6為導引頭俯仰面天線子陣測向示意圖。天線B1與C0組成短基線天線陣,d1、d2分別為短基線和長基線長度。
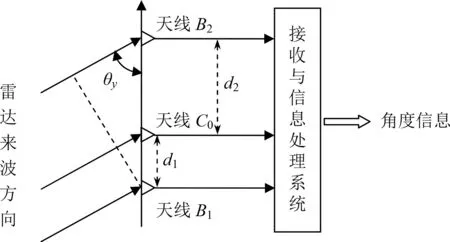
圖6 俯仰面天線子陣測向示意圖
因此,雷達來波方向與俯仰面、方位面天線子陣基線夾角分別為[13]
(8)
那么,目標雷達來波方向與天線軸線OXP的夾角θx:
(9)
因此,目標的方位偏差角和俯仰偏差角分別為
(10)
飛控系統按照測角采樣周期間隔不斷采樣偏差角數據,控制無人機對目標進行橫向和縱向跟蹤。
3 反輻射無人機與誘餌陣對抗方法分析
假設ARUAV性能參數:飛行高度為2 000 m,導引頭前沿采樣時間為100 ns。[10]
誘偏系統參數:誘餌頻率與雷達頻率相同。3誘餌與雷達采用菱形布陣方式[14],相互間距為300 m,其空間坐標分別為:雷達(-260 m,0 m,0 m) 、誘餌1(0 m,0 m,150 m) 、誘餌 2(260 m,0 m,0 m) 和誘餌3(0 m,0 m,-150 m) 。
3.1 基于空間傳播時間差的對抗方法分析
在飛行高度2 000 m、導引頭前沿采樣時間設為100 ns時,3誘餌信號在空間時差分布示意圖如圖7所示。圖中細點、粗點和空白區分別為單誘餌信號區(Ⅰ、Ⅲ、Ⅴ)、雙誘餌信號區(Ⅱ、Ⅳ、Ⅵ)和3誘餌信號區(Ⅶ)。在單誘餌誘偏區,其中1部誘餌與剩余兩部誘餌信號到達導引頭的時間差大于Δμ,存在單部誘餌暴露區;在雙誘餌誘偏區,兩部誘餌與剩余誘餌信號的到達時間差大于Δμ且兩誘餌到達時間差小于Δμ,無人機在該區域受兩部誘餌質心誘偏;在3誘餌誘偏區,3誘餌信號到達導引處的時間差均小于Δμ,無人機在該區域受3部誘餌質心誘偏。
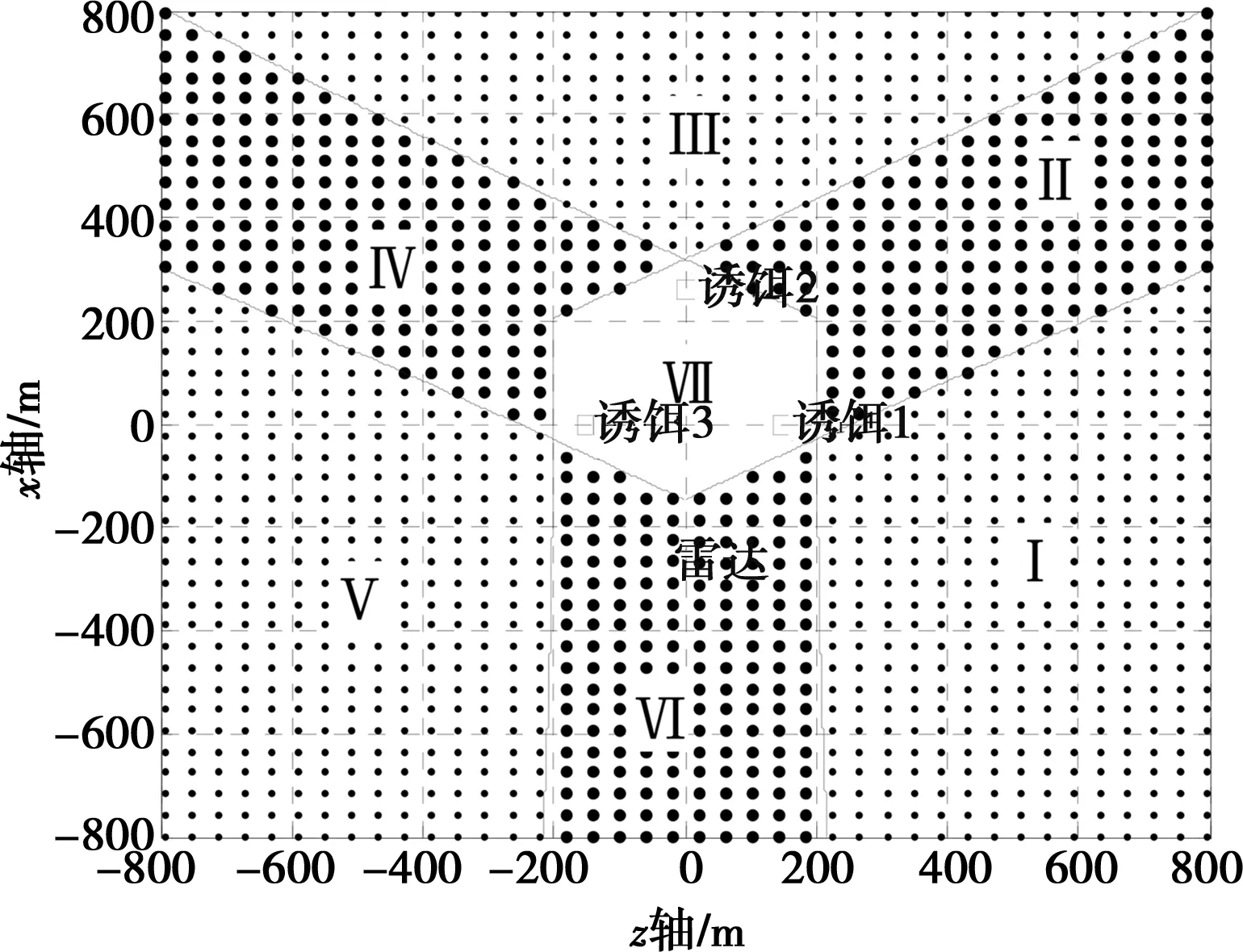
圖7 3誘餌信號的空間時差分布圖
因此,在該模式下研究ARUAV的攻擊效能要重點考慮入侵角度因素的影響。在航跡規劃上,可以采取互成直角的攻擊方式,可以最大概率地確保某架反輻射無人機在單誘餌誘偏區域。如圖8所示,入侵角分別為80°和-10°時ARUAV攻擊航跡圖。
圖8 前沿采樣體制ARUAV攻擊航跡圖
分析圖8可以看出,入侵角為80°時ARUAV使從單誘餌誘偏區域Ⅴ進入。該區域為單誘餌誘偏區。從該區域入侵的ARUAV只受誘餌3的誘偏,最終落在(-1.9,0,-148.2)處,命中誘餌3。入侵角為-10°時ARUAV從雙誘餌誘偏區域Ⅵ進入。該區域為誘餌1和誘餌3的共同誘偏區。從該區域入侵的ARUAV將受誘餌1和誘餌3的合成場誘偏,最終落在(-12.4,0,-53.7)處。從落點位置看,無人機落點并不在誘餌1、3的中點處。這是由于在俯沖攻擊末端某部誘餌脫離導引頭天線視場而導致無人機最終攻擊另一誘餌。[15]
3.2 基于發射時序時間差的對抗方法分析
假設雷達誘餌系統通過控制發射時序實現閃爍周期為1.5 s的閃爍誘偏。在ARUAV按照固定搜索路徑飛行時,根據比相導引頭天線陣測向原理,導引頭天線方位面和俯仰面測向誤差角角度變化情況如圖9、圖10所示。
由圖9、圖10可見,從數據跳變大小和方向可以明顯判斷出有3部誘餌,且采用周期閃爍模式。導引頭信號處理系統通過不同時刻測角數據跳變關系和測角大小,可以測定誘餌系統的閃爍周期T。無人機飛控系統將按照導引頭測向誤差角數據適時調整攻擊姿態。由于導引頭天線數據在3誘餌間不斷跳變,從而控制機體反復跟蹤3誘餌,使整個攻擊航跡呈現出追擺狀態(航跡如圖11所示),最終命中點(139.6,0,59.7),雷達及誘餌均安全。
圖9 天線方位面偏差角變化曲線
圖10 天線俯仰面偏差角變化曲線
圖11 無人機在閃爍誘偏下的攻擊航跡
因此,實時調整飛控系統的測角采樣周期,使反輻射無人機末制導測角采樣周期等于誘餌閃爍周期的整數倍(即Ts=nT)時,導引頭上傳給飛控系統的測向數據將會是某一誘餌的方向數據。飛控系統將會引導無人機始終跟蹤該誘餌,直至命中。圖12為當Ts=T,即末制導測角采樣周期等于誘餌閃爍周期時,反輻射無人機的攻擊航跡圖。從仿真可以看出,在該條件下無人機能夠穩定跟蹤某一部誘餌,并最終命中。
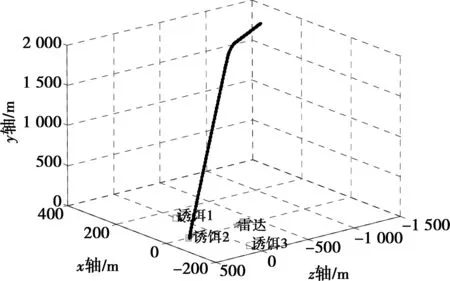
圖12 無人機航跡圖(Ts=T)
因此, 通過測定誘餌閃爍周期,尋求末制導測角采樣周期與誘餌閃爍周期間的最佳匹配值,然后通過修改飛控計算機與導引頭的通信模塊控制軟件,使飛控系統有選擇性地獲取導引頭的測向數據來實現對跟蹤攻擊的最佳控制。
4 結束語
本文在分析雷達誘餌系統誘偏機理的基礎上分析誘餌信號傳播時間差和發射時序差對反輻射無人機進行研究,得出了以下結論:(1)誘餌系統空間傳播時間差使誘餌布陣出現單誘餌暴露區,采取互成直角的航跡規劃方式來避免多誘餌質心干擾,可以最大概率地摧毀單誘餌暴露區的誘餌;(2)誘餌系統通過控制發射時序差來實現同步閃爍誘偏。反輻射無人機可根據測向偏差角數據的角度和大小特點識別出誘餌系統的閃爍周期。飛控系統按照閃爍周期間隔來采樣測角數據可以實現對誘餌系統某一部誘餌的摧毀。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06