精密電子設備運輸預警系統實現
2020-12-25 02:27:44張小峰
雷達與對抗 2020年3期
關鍵詞:測量
楊 楠,薛 帆,張小峰
(中國船舶集團有限公司第八研究院,南京 211153)
0 引 言
精密電子設備包括精密測試儀器儀表、電子控制機柜、通信傳輸裝置等。在運輸過程中精密電子設備容易因駕駛員操作不當造成沖擊或者碰撞,或因車廂環境因素影響導致儀器參數發生變化、貴重物品損毀等情況,使得儀器測量結果不準確或者無法正常使用,甚至發生災難性的損毀。在實際生產活動中,由于保密需求及實際運輸環境需求,各種精密電子設備可能需要通過汽車進行長途運輸。
精密電子設備在運輸過程需要極其規范的運輸流程及運輸記錄。當一臺電子控制機柜經歷的機械振動超過了建議級別將會發生機柜機械結構損壞、元器件預設參數發生變化等損害。[1]這些損害一般比較隱蔽但危害極大。如果操作不慎造成精密設備損壞,使用時極易發生故障從而導致各類使用問題的出現。所以,在物流運輸過程中對沖擊有如下要求:精密電子設備在剎車操作過程中發生的縱向沖擊和由于路面情況而出現的垂直和橫向沖擊、垂直和橫向加速度應小于0.5 g(重力加速度值);避免發生滾動、顛簸和偏離航線;避免以規律性周期出現的低頻率振動;橫滾最大加速度應小于0.3 g。[2-3]所以,需要一種準確性高、靈敏度好、低功耗、低成本、實時性的精密電子設備運輸預警系統對整個運輸過程中受到的速度、加速度、震動和撞擊,以及環境的溫濕度等進行檢測和記錄,當精密物體受到損壞或可能發生損壞時進行預警,并為最終損壞判定提供數據支持。
車輛姿態解析是精密物品運輸狀態追蹤預警系統中的關鍵技術。該技術的研究日益受到國內外學者的廣泛關注[4]。該技術應用三軸加速度系列傳感器(如加速度傳感器、陀螺儀、地磁傳感器)得到車輛姿態信息,并對其進行有效處理、分析,能夠準確無誤地識別出車輛的運行狀態,從而判斷是否發生碰撞;應用溫濕度傳感器從而判斷溫濕度、光照強度對精密物品是否有影響。當以上數據超出設定閾值,管理端會向車載顯示端發出提示信息來指導駕駛員的駕駛行為。[5]
1 預警系統框架設計
精密雷達設備動態運輸預警系統整體框架如圖1所示,其主要分為檢測系統和數據處理系統。
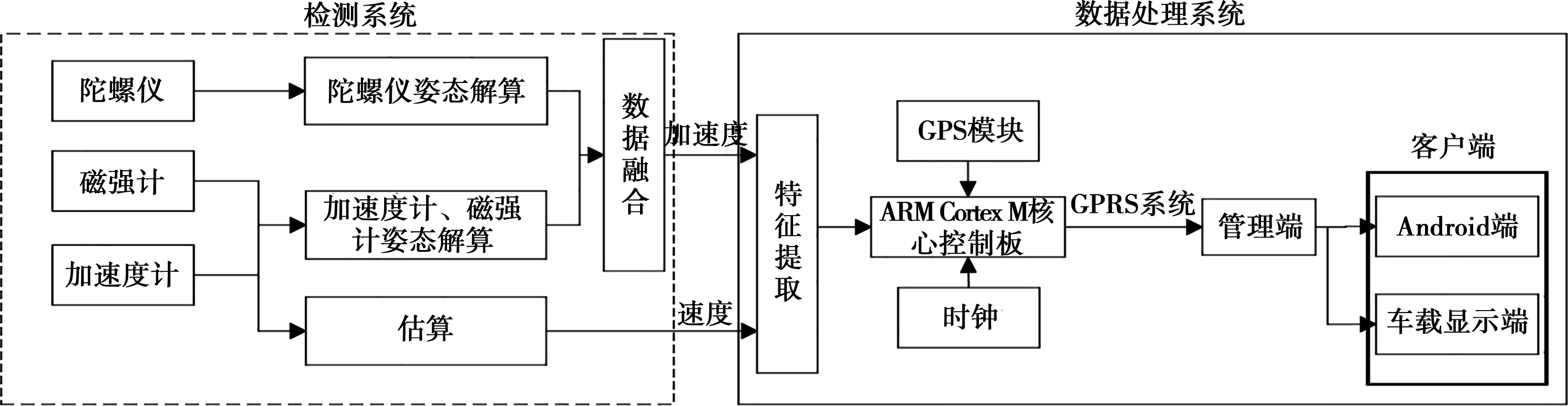
圖1 可視化管理系統框架設計示意圖
精密電子設備預警系統的檢測系統以航向姿態參考系統為基礎實現交通工具姿態和速度信息的估計。航向姿態預測系統主要由陀螺儀、三軸加速度計和三軸磁強計等傳感器組成,能夠提供載體三軸的姿態角度、加速度、角速度、磁場值等信息。當對三軸加速度傳感器數據進行融合分析后,核心控制板將這些數據連同溫濕度、GPS地理信息數據與時鐘信息通過GPRS模塊發送至管理端進行數據處理與存儲。這些數據都可以使用唯一的ID通過web客戶端和Android客戶端進行查詢及軌跡追蹤。
管理端數據處理程序接收GPRS模塊發送的解析的車輛行為參數,以及環境溫濕度、GPS地理位置和時間信息。管理端對車輛行為參數進行特征提取,進而識別車輛行為,并對識別出的車輛行為、溫濕度信息進行判斷,若超出設定閾值則會發送預警信息至車載顯示端,以此來對駕駛員的駕駛行為進行指導。管理端數據處理程序的流程如圖2所示。
2 車輛行駛姿態解析
車輛行駛姿態解析是航向解析中一個重要的研究方向。航向解析一般依靠安裝在車輛載體上的磁強計解算出車輛加速度,接著通過安裝在車輛上的磁力傳感器、相應的車載陀螺儀以及加速度計測量出運輸載
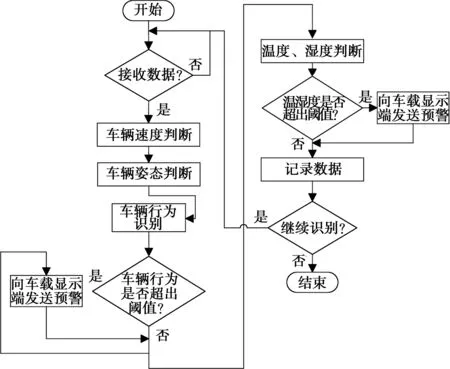
圖2 管理端數據處理程序流程圖
體的方位,最后通過多元異構的方式對車輛的姿態進行解析。
本系統根據精密電子設備運輸預警系統的實際需求使用陀螺儀、加速度計和磁強計搭建航向姿態參考系統計算姿態、速度的估計,其結構如圖3所示。
本系統的車輛解析框架采用實時旋轉陀螺儀對車輛載體的變化角度進行求解,通過旋轉方位積分的方式可求出車輛載體在運輸工程中產生的相對姿態變化角度。接著通過加速度計和磁強計可求得車輛載體的航向坐標系, 最后通過航向坐標系與大地坐標系的坐
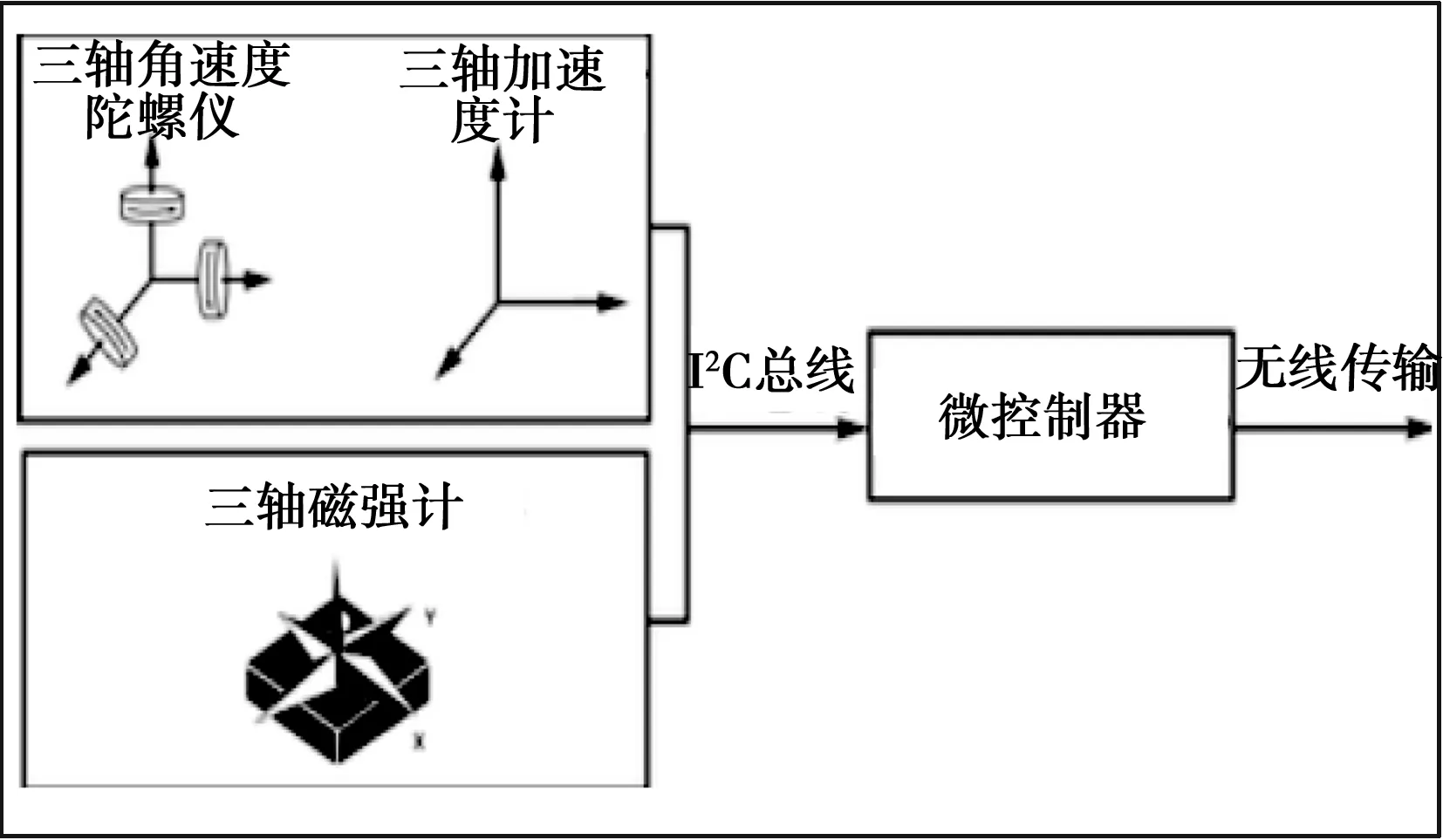
圖3 車輛行駛姿態解析示意圖
標級聯轉換的方式求解出車輛載體的航向角。
本系統采用三軸加速度計、三軸磁強計和三軸陀螺儀進行組合姿態測量。首先通過三軸加速度傳感器和三軸磁強計測量出車輛載體相應的航向角度。當得到航向角度后,對航線角度在大地坐標系上進行映射,可以估算出車輛載體在大地坐標系上的觀測矢量,同時依靠車輛載體在大地坐標系的觀測矢量可以得到車輛載體的實時運動軌跡。
在姿態解析系統中,相應的陀螺儀是測量運動姿態最主要的傳感器。本系統采用的三軸微機陀螺儀的工作原理是通過科氏加速度反推出振動力塊的應力方向,從而可以測量陀螺儀的方位,接著通過檢測振動力塊的相對位移從而得到陀螺儀相應角速度ω,如圖4微機陀螺儀工作原理所示。具體運算如下:
假設在相應的大地坐標系XOY內所對應的m在X軸方位的陀螺儀的振動速度為v,當坐標系XOY繞Z軸以角速度ω旋轉時,根據牛頓力學原理,m在世界坐標系XOY的Y軸上產生的科氏力為f=-2m[ω×v],而相應產生的力與角速度ω成正比,所以測量Y軸方向力塊m的位移即可求出陀螺儀的角速度ω即運動載體的姿態變化角度。
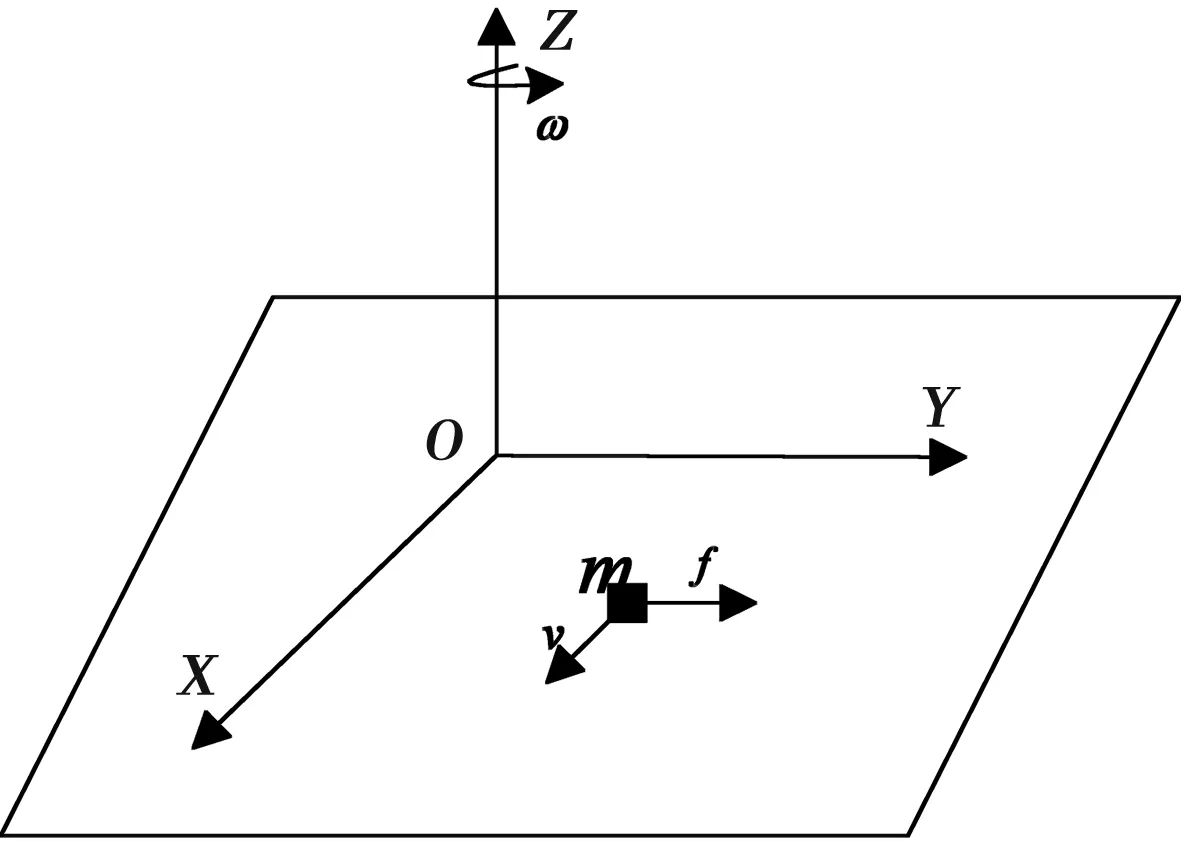
圖4 微機陀螺儀工作原理圖
在實際的數據測量中,由于物體處于運動狀態,物體質點的加速度難以進行直接測量,所以微機加速度計采用將加速度轉變成間接牛頓力的方式進行測量。微機加速度計中具有相應的應力塊,通過檢測測量加速度計中應力塊的電容、電壓值可以估算出應力塊的慣性力,通過測量應力塊所受的相應的慣性力即可得出加速度值的大小。
通過加速度計的測量原理可知,加速度力所測量的數據是應力塊所受到的慣性力與重力之和,即f=α+g。從平臺的加速度得到的結果可知,當加速度計處于完全靜止的狀態,加速度計輸出的就是相應的重力加速度。根據上述數據,可以通過計算重力場在大地坐標系的幾何關系從而得到相對應的平臺加速度。
磁強計是一種利用電磁感應現象測量所處空間的弱磁場的傳感器。磁強計的基本工作原理是利用電磁的交變感應輸出非對稱變化的電壓,通過間接測量輸出電壓的方式實現磁場的測量。由于環境中地磁場的強度很小,易受到外部磁場的干擾,難以準確測量。因此,只能將磁強計作為一種輔助方式進行航向姿態測量。
車輛姿態解析系統在傳感器相應的選型如圖5系統硬件部分所示。選用六軸地磁模塊LSM403DLH作為三軸加速度計、三軸磁力計的載體。陀螺儀選型為三軸陀螺儀PR430AL()并使硬件與其坐標系與大地坐標系相互對應。系統部分硬件的測量范圍、靈敏度、工作溫度具體參數如表1所示。
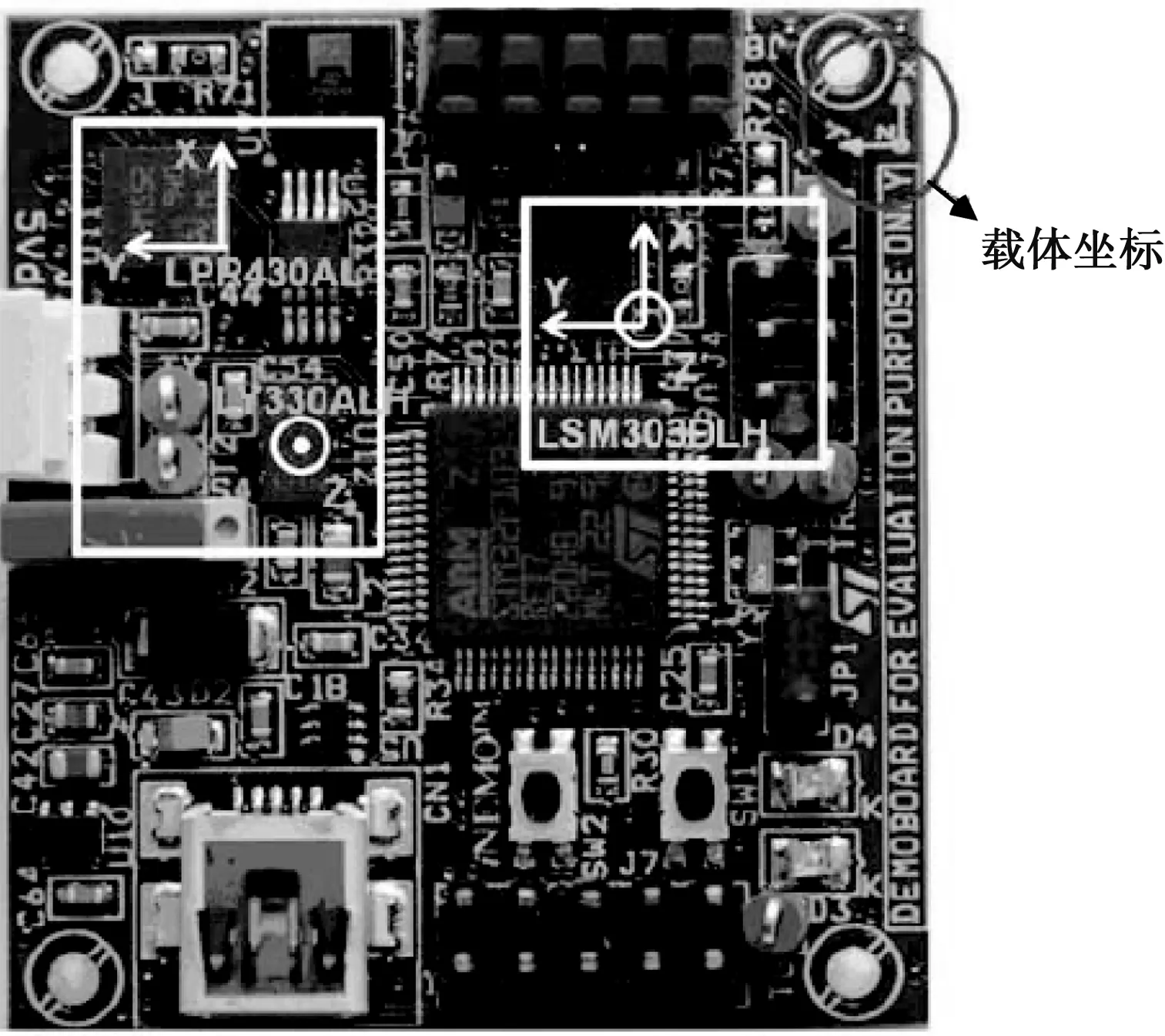
圖5 系統硬件實物圖
3 預警系統數據處理部分
數據處理部分接收GPRS模塊發送的車輛行為參數,以及環境溫濕度、GPS地理位置和時間信息。處理部分對車輛行為參數進行特征提取,進而識別車輛運輸載體行為,對識別出的車輛行為、溫濕度信息進行判斷。如果車輛運動行為、車廂內溫濕度超出設定閾值則會發送預警信息至車載顯示端, 以此來對駕駛員的駕駛行為進行指導。管理端界面如圖6所示。本項目同時設計并實現了精密電子設備運輸預警系統Android客戶查詢端。經過后臺管理端處理分析的數據全部可以通過客戶端查詢。車輛每次運輸會有唯一的ID對應。客戶通過ID查詢可以實時地查看汽車在運輸過程中的地理位置、溫濕度、車速、車輛行為的詳細數據,并可查詢汽車的行駛軌跡,具體實現如圖7、8、9所示。
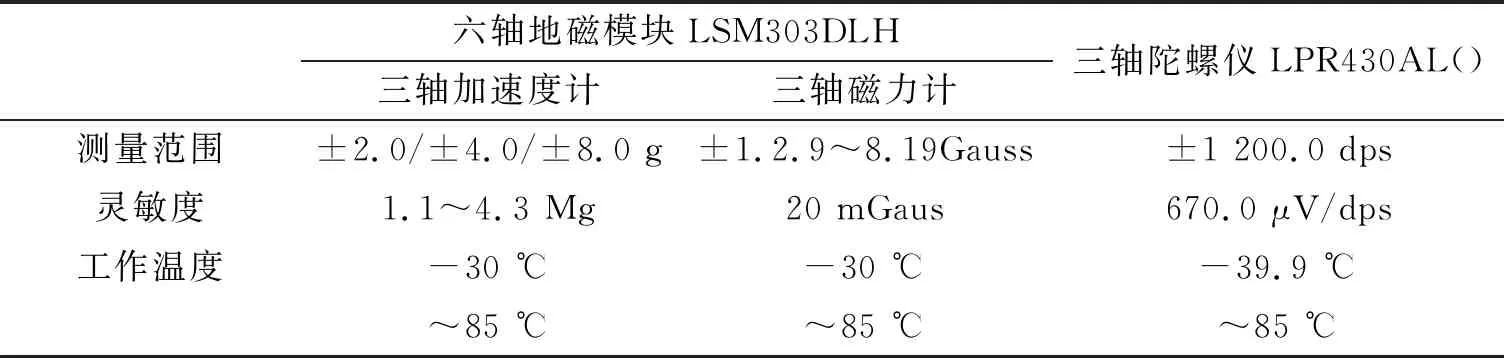
表1 系統部分硬件指標

圖6 系統管理端示意圖
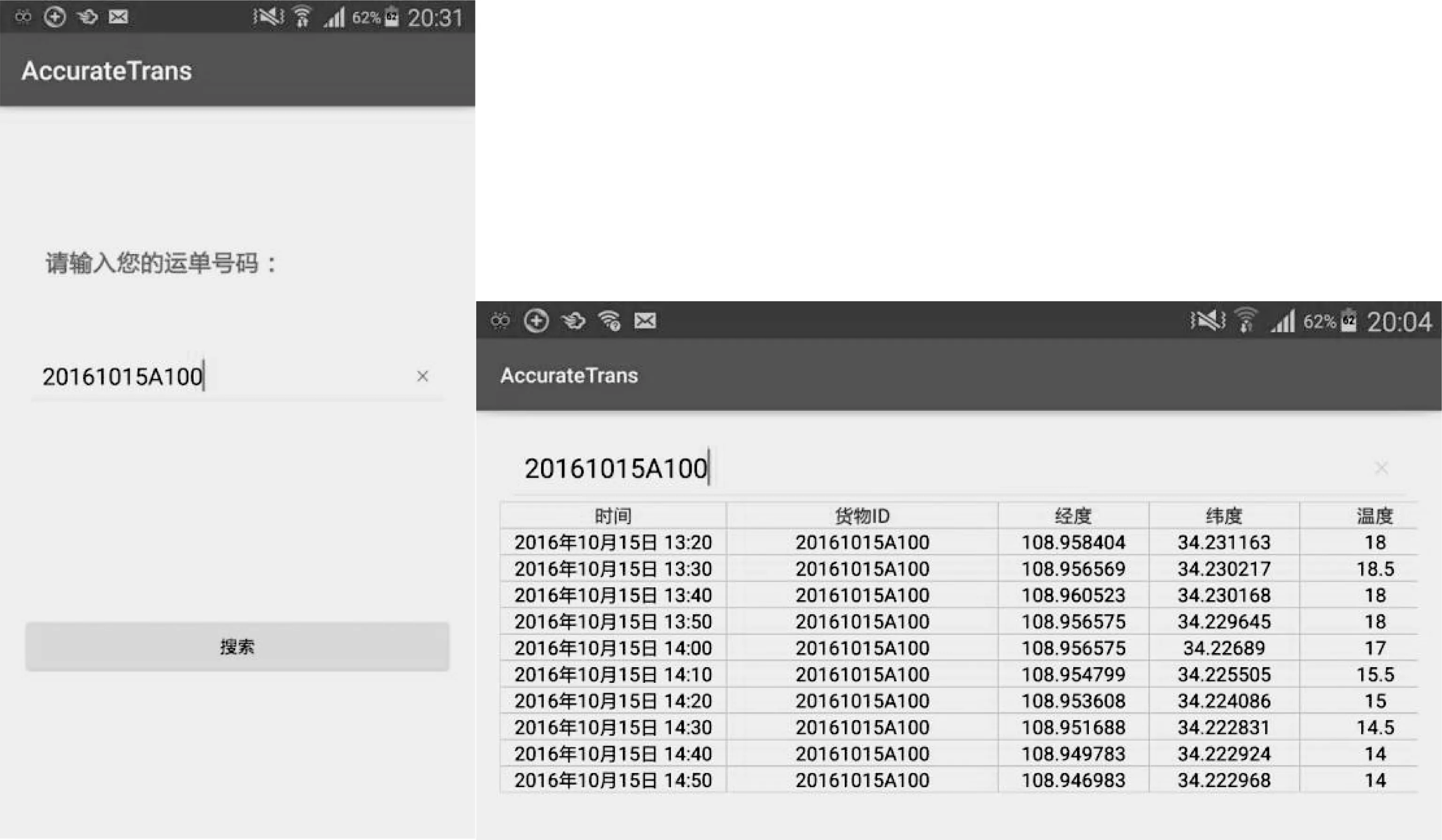
圖7 Android客戶端界面-查詢界面示意圖

圖8 Android客戶端數據分析結果示意圖
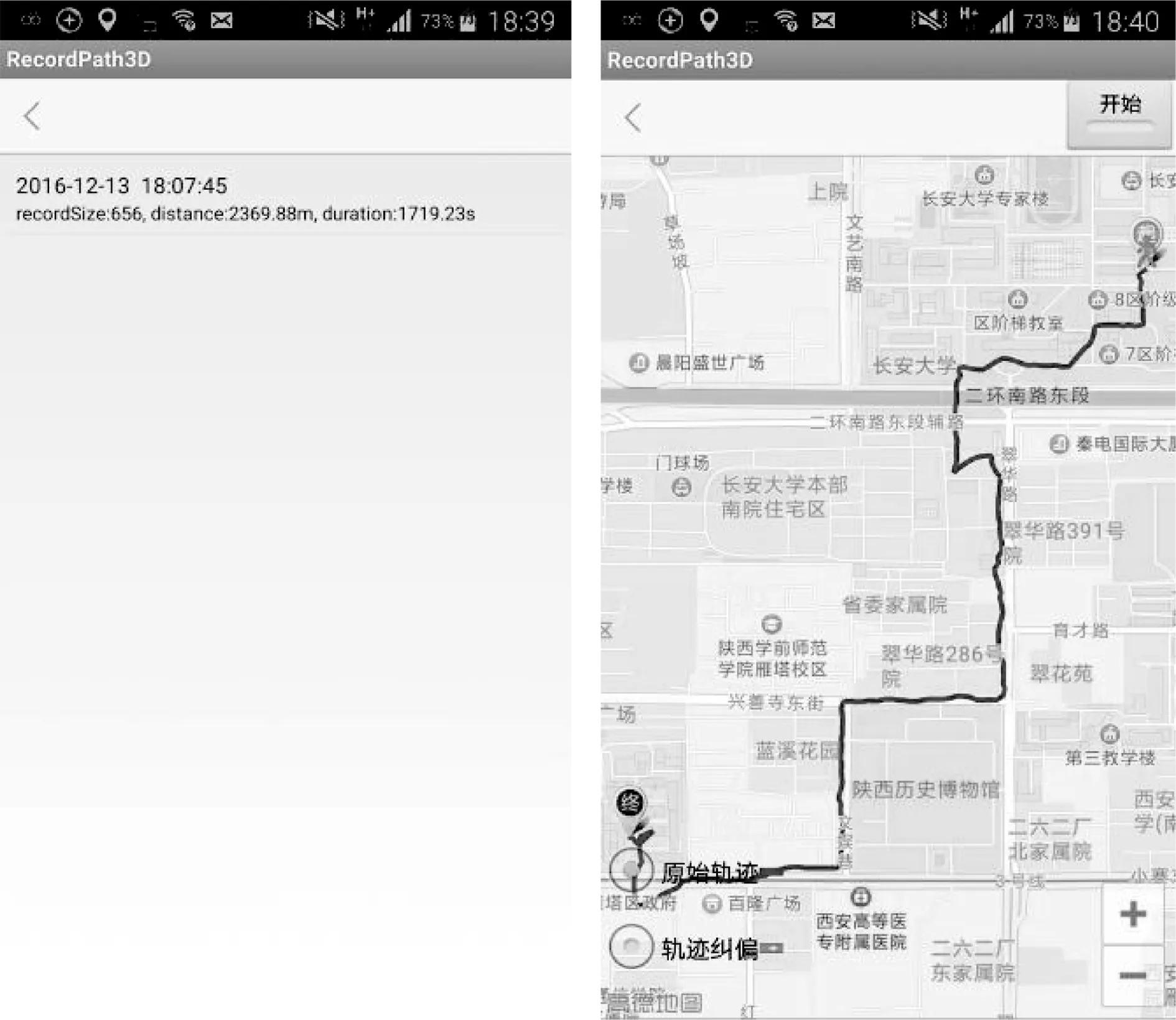
圖9 Android客戶端界面-軌跡跟蹤示意圖
4 結束語
本文設計了一種具有精度高、硬件成本低、安裝方便等優點的精密電子設備運輸預警系統。該設備能夠對精密電子設備運輸狀態進行預警及運輸過程進行存儲。該系統能夠通過融合加速計、磁強計等多源傳感器數據解算出運輸設備運動中的狀態(如載體加速度、載體傾角、載體振動幅度等)。同時,此設備利用溫濕度傳感器記錄精密電子設備運輸過程中設備的溫濕度狀態,并且本系統開發了Android客戶端的查詢軟件,能夠通過后臺數據庫查詢歷史分析結果、運行軌跡、溫濕度等數據。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00