基于三維激光雷達技術的電力巡線方法研究
2020-12-25 03:16:26蕭振輝劉余敏
微型電腦應用 2020年12期
蕭振輝, 劉余敏
(廣州供電局有限公司, 廣東 廣州 510000)
0 引言
隨著工業用電和民用用電量的增加,我國電力設施建設隨之增加。我國高壓輸電線不斷應用到遠距離電力輸送中,這種高壓輸電線對我國電力資源的輸送具有重要意義。但是輸電線長期暴露在大氣環境中,會產生一定的質量問題,因此需要定期檢查電力線路,以及時發現電力線路中存在的問題,減少電路問題帶來的經濟損失。傳統的電力巡線方法一般采用人工測繪[1-2],已經不適用目前的巡線工作。為解決目前電力巡線上的問題,提出一種基于三維激光雷達技術的電力巡線方法,為工業和民用電等用電提供保障。
三維激光雷達技術是一種利用激光測距原理和航空攝影測量原理,快速獲取大面積地球表面三維數據的技術。根據從發射目標反射回來的信號與發射信號比較,在處理后,就可以獲得目標的相關信息,如目標距離、位置、高度等,從而對物體探測,具有作業速度快、工作量小、獲取數據量大等特點。同時,可快速生成數字高程模型、數字表面模型和數字正射影像等,因此將其應用到電力巡線檢測中,具有重要意義。
此次設計方法首先計算三維激光雷達到目標物的距離,對電力線點云的連通成分分析,獲取電力線激光雷達點云數據,然后對點云數據處理,根據準確的坐標信息完成對電力的巡線。實驗對比結果表明,此次設計的基于三維激光雷達技術的電力巡線方法比傳統的巡線方法效率高。
1 基于三維激光雷達技術的電力巡線方法設計
1.1 電力線激光雷達點云數據獲取
對電力線激光雷達點云數據獲取的目的是將同一電力線的激光雷達點聚為一類,將不同電力線的激光雷達點聚為不同類,從而減少巡線時間,以提高電力巡線的效率。
基于三維激光雷達技術的電力巡線過程,如圖1所示。

圖1 三維激光雷達測量過程
由于三維激光雷達技術原理是經激光發射器發射激光脈沖至目標物[3],在這一過程中,三維激光雷達高度以及掃描的角度和方向存在差異,因此首先對三維激光雷達到目標物的距離計算,如式(1)。
(1)
式中,i為震蕩器頻率,g為脈沖個數,c為三維激光雷達光速,n為被測目標。通過上述公式,得到三維激光雷達到達目標物的位置信息,在此基礎上,借助K-N樹[4]實現電力線點云的連通成分分析,具體步驟如下。
Step1:將待處理的激光點集的電力線路標號狀態設置為未標號,將未標號的點集放至統一隊列,同時建立點集的空間索引,設置點集起點標號為O;
Step2:在點集隊列中,順次查找未標號的點,若未標號的點為空,則結束標號過程,如果標號點不為空,將點集隊列中未標號的點重建壓入新的隊列,記為種子點隊列;
Step3:以種子點隊列中的第一個未標號的點記為種子點[5],借助K-N樹查找該種子點的臨近點,將臨近點中所有未標號的點存入該隊列;
Step4:查看種子點隊列中未標號點的數量,如果數量不為0,則回到step3步驟,如果未標號數量為0,進入下一步驟;
Step5:將種子點隊列中的所有雷達[6]點標記為Ldjgn,并清空種子點隊列。
通過上述過程獲取到電力線激光雷達點云數據,根據該數據查看電力線情況,為電力巡線提供基礎依據。
1.2 基于三維激光雷達技術的電力巡線實現
在上述電力線激光雷達點云數據獲取的基礎上,對電力巡線,由于獲得的點云數據存在差異和坐標等問題,所以先對雷達點云數據處理,再對電力巡線,具體過程如下。
第一,對三維激光雷達精度校檢,對獲得的測量數據進行差分解算,以測量出準確的電力信息。由于三維激光雷達在電力巡線[7]過程中會受到多種誤差影響,因此對三維激光雷達進行精度校檢,首先計算三維激光雷達單機自身參數的影響,如式(2)。
(2)
式中,S代表點云密度,w代表掃描半徑,p為角分辨率,θ代表掃描半角。通過上述公式,調節單機自身參數,減少單機自身參數對電力巡線的影響,以獲得準確的測量結果。
第二,確定雷達目標位置,處理差分后的雷達位置信息,將航跡與姿態進行組合解算[8],得到精確的位置信息。由于三維激光雷達系統獲取的點云數據不具備坐標和空間信息,需要對點云數據處理獲得激光點的三維坐標值,對點云數據處理的流程圖,如圖2所示。
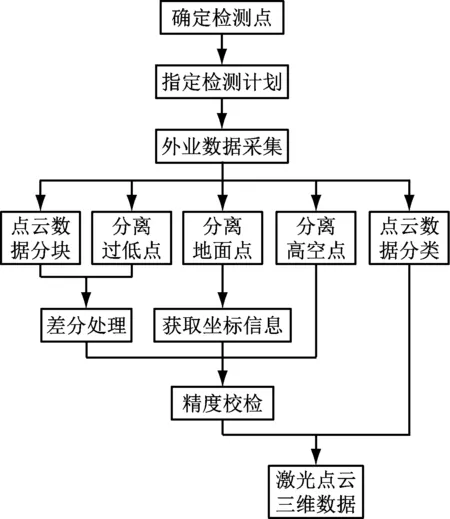
圖2 點云數據處理流程圖
第三,激光點云數據生成,經過上述處理,獲得測點的三維坐標信息,由于原點云數據生成激光點云數據較為復雜,因此對坐標系進行轉換。假設激光發射瞬間測得的掃描距離為Q,則激光腳點[9]在瞬時掃描坐標系的坐標,如式(3)。
(3)
式中,RSL為掃描坐標系到參考坐標系[10]的轉換因子,Xq、Yq、Zq分別為瞬時掃描坐標位置,a、b、q分別代表相應坐標點的掃描距離。通過上述計算,完成坐標系的轉換,然后根據基于三維激光雷達的點云數據,在下一步對電力線路進行加密濾波和分類。
第四,對電路分檔[11],確定每一個電力線路檔的三維空間范圍,由于三維激光雷達獲取的每一個電力線路的連通成分可能包含同一電力線多檔的激光雷達點,因此將該連通成分以電力線路檔分為相應的差分單元,如式(4)。
(4)
式中,m代表電力線路檔,RT為激光雷達點端點坐標,lbcx代表單元拆分因子,z代表檢測檔與檔之間的拐點。
在此基礎上,采用分層隨機抽樣的方法對電力線路的單檔電力線進行點云聚類[12],如式(5)。
(5)
式中,B為分層隨機抽樣因子,u代表電力線劃分因子,ya為電力線路測量值。
通過上述計算,將每一個電力導線的點數據劃分到相應的根中,獲得準確的電力線路信息。同時為進行可視化的巡線,構建交互環境,真實反應電力線路現狀,滿足電力應用需求。同時,建立空間數據庫,將獲得的電力線路信息與其對應的屬性集成并存儲于空間數據庫中,同時該數據庫中提供線路查詢與分析功能,電力巡線提供可靠基礎,以此完成基于三維激光雷達技術的電力巡線。
2 實驗論證
2.1 實驗方案設計
為驗證上述設計的基于三維激光雷達技術的電力巡線方法的有效性,進行實驗論證。同時,為使實驗更具說明性,將傳統的電力巡線方法與此次設計方法對比,評價兩種方法的電力巡線效率,效率評價采用時間開銷作為指標。實驗數據由Opsdf機載激光測量儀獲取,兩種方法使用相同實驗數據,實驗平臺配置包括:ThinkPadW520筆記本,CPU為2.4 GHz,處理器內存4 GB,操作系統為Windows XP系統,測試服務器選用Intel Pentium X2,并利用SHDUFI仿真軟件模擬電力線路環境。此次實驗環境,如圖3所示。

圖3 實驗環境
在實驗平臺中,設置Dfiyo、Fxfgn、Xfhgj三條電線,這三條電線中故障點數不同,分別對比兩種電力巡線方法檢查這三條故障電線的時間。
2.2 實驗結果分析
2.2.1 電力巡線時長對比
此次設計的基于三維激光雷達技術的電力巡線方法與傳統的電力巡線方法的故障效率,如表1所示。

表1 實驗對比結果
分析上表可知,第一條Dfiyo線路中故障線路較少,傳統電力巡線時間與此次設計方法的電力巡線時間相差3.008 min;第二條Fxfgn線路中故障線路點比Fxfgn多,傳統電力巡線時間與此次設計方法的電力巡線時間相差5.001 min;第三條Xfhgj線路中故障點最多,傳統電力巡線時間與此次設計方法的電力巡線時間相差7.21 min。
對比可知,在故障點較少時,傳統方法的巡線時間與此次設計方法的巡線時間相差較小,而隨著故障點的增加,傳統方法的巡線時間與此次設計方法的巡線時間相差越來越大。綜合實驗結果得知,在故障點多和少的情況下,此次設計的基于三維激光雷達技術的電力巡線方法效率均高于傳統方法的巡線效率。因為此次設計方法參數少,計算復雜程度低,無需人工干預,自適應性強;傳統方法需要經過初值求解、模型優化、線路檢測等過程,導致電力巡線檢測時間過長。因此,通過上述實驗可以證明,此次設計的基于三維激光雷達技術的電力巡線方法效率較高,能夠及時發現電力線路中存在的問題,具備實際應用意義。
2.2.2 電力巡線的準確性對比
基于三維激光雷達技術的電力巡線方法與傳統電力巡線方法的準確率,進行實驗對比,如圖4所示。

圖4 電力巡線準確率對比圖
圖4表示了經多次迭代后,三維激光雷達技術電力巡線方法和傳統的電力巡線方法的準確率對比圖。可以看出,每次迭代本文方法的準確率都高于傳統方法,隨著迭代的次數增多準確率也隨之增加。而傳統方法的準確率明顯低于本文方法,隨著迭代次數的增多不但未有明顯的改變,還有下降的趨勢。因此,通過本次實驗可以證明,本文中基于三維激光雷達技術的電力巡線方法準確率較高,在電力巡線的使用中比傳統方法具有更大的優勢。
3 總結
針對傳統的電力巡線方法效率低的情況,設計了一種基于三維激光雷達技術的電力巡線方法,以滿足電力巡線需求。此次設計方法首先對電力線激光雷達點云數據獲取,在獲取點云數據的基礎上對其處理,得到準確的電力線路點的坐標信息,根據坐標信息完成對電力信息的查看。實驗對比結果表明,此次設計的基于三維激光雷達技術的電力巡線方法比傳統巡線方法效率高,更具備應用優勢。證明此次設計的電力巡線方法能夠降低電力部門的巡線預算、降低勞動強度,減少巡線時間,在短時間內查看電力線路中的問題。
希望此次設計的基于三維激光雷達技術的電力巡線方法為電力巡線提供幫助,為電網發展提供有力的支持。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
