智能配電網故障定位與隔離方法研究
2020-12-27 13:47:08林榮秋
通信電源技術 2020年16期
林榮秋
(廣東電網有限責任公司湛江供電局,廣東 湛江 524000)
1 分布式電源的智能配電網的故障定位方法分析
1.1 概 述
一般情況下,智能配電網分布式電源采取開環運行的方式。在整個配電網中,變電站只是一個電源點(根節點)。根據根節點類型,可以將其分成父節點和子節點。當處于正常運行狀態時,變電站(屬于根節點)的父節點是流入功率節點,而子節點是變電站提供功率的節點。基于這一原則進行配電關系網的劃分和構建,從分段母線中接入分布式電源。若分布式電源發生短路故障,則故障節點處的短路電流源于變電站和分布式電源。定位故障點前,需要分析故障點可能存在的位置。一般而言,故障點存在于FTU設備、FTU設備之間或者不同設備之間。本實驗中的FTU設備主要指上下級相鄰兩個節點間的FTU類設備,而節點主要是指分布式電源的分支節點。通常而言,父節點主要是指上級節點,子節點主要是指下級節點[1]。
1.2 故障定位方法
1.2.1 不同FTU間的故障判斷方法分析
此類方法的正方向是指從變電站到線路末端,變電站側屬于上游,線路末端屬于下游,也是下游正方向故障的電流流向。研究將這一方向設為1,反向故障電流流向設為-1。按照節點電流定律分析,進入母線中的故障電流與從母線中流出的故障電流相等,由此得出其判斷示意圖,如圖1所示。
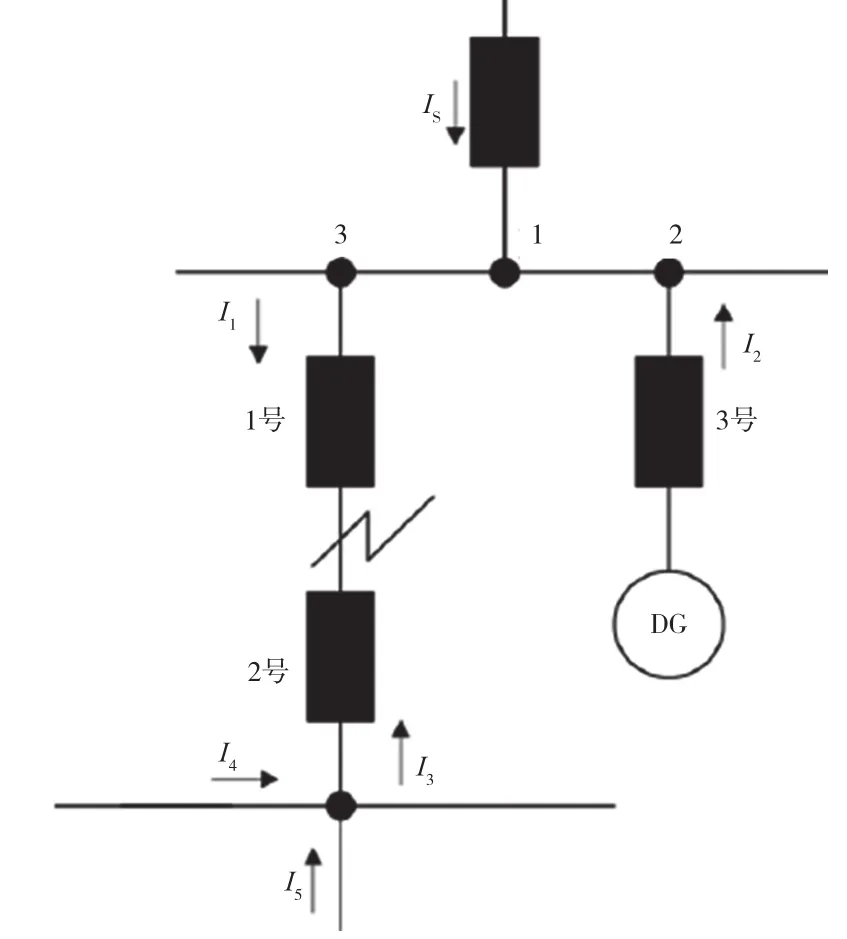
圖1 不同FTU間的故障判斷示意圖
從圖1可以看出,當故障在1號和2號FTU之間時,此時故障電流I2和IS均為流入節點,I1和I3均為流出節點,I4和I5均為流入節點。因此,I1和IS均為正方向1,I3和I5均為負方向-1。若在FTU裝置中存在故障點,那么故障點的范圍就在父子節點之間的電流方是1和-1的FTU裝置間,從而判斷故障在父子節點間最后的電流方向為1的FTU裝置與下一個FTU裝置之間。
1.2.2 不同節點間的故障判斷方法分析
為了更好地在不同節點之間確保故障判斷的精準性,可以按照圖2的內容進行判斷。從圖2可以看出,當故障點位于節點1與節點4之間時,I2、IS、I3屬于流入節點,I1為流出節點,得出I1=I2+IS+I3。IS方向為1,其他為-1。若故障電流流入故障發生地時故障點在兩個不同節點間,此節點、父節點以及子節點間的故障電流方向都是-1,進而得出故障點在上游最后一個電流方向為1的FTU裝置線路的端節點與兄弟節點的中間。
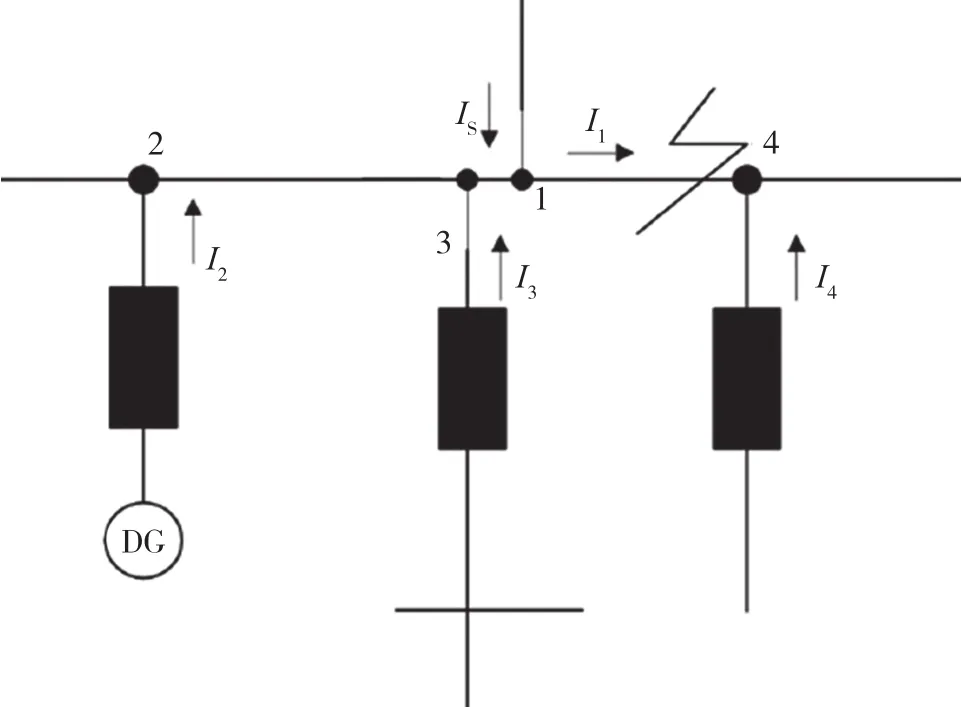
圖2 不同節點間的故障判斷示意圖
1.3 故障定位方法的驗證
1.3.1 網絡描述矩陣分析
在網絡結構中,兩個不同的FTU裝置分別在上下游。上游的裝置設為i,下游的裝置設為j,i<j。通過網絡描述矩陣中的元素,若兩個裝置中間存在饋線,得出dij=1,dii=0,dji=0。從圖3可以看出,在分布式電源中,故障點位于F1,其網絡描述矩陣D為:
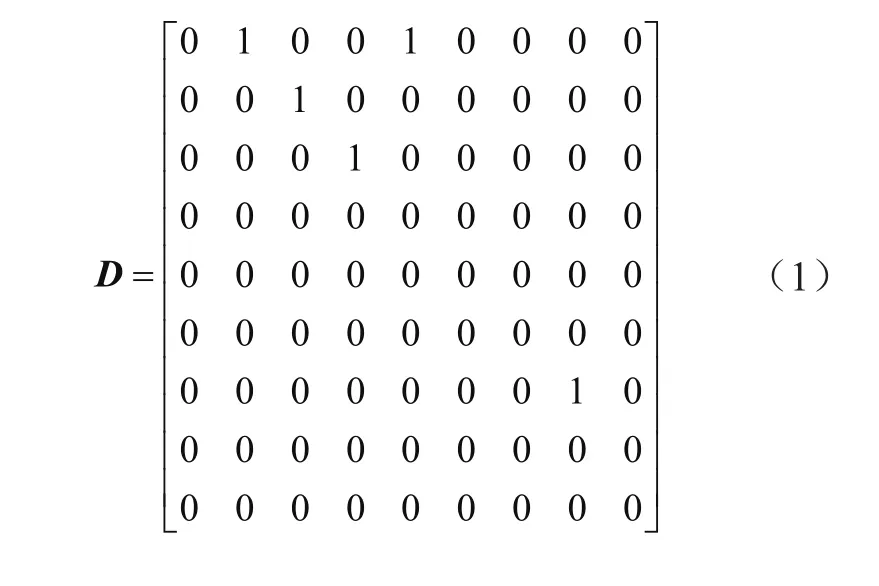
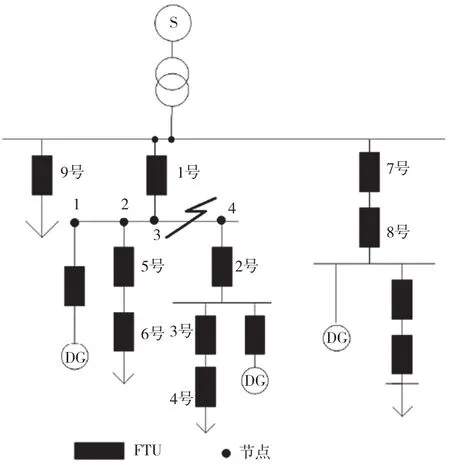
圖3 網絡描述矩陣
1.3.2 故障信息矩陣分析
故障信息矩陣G中,元素gi的定義如下:若流向FTU裝置i的故障電流方向與假設正方向相同時,gi=1;若流向FTU裝置i的故障電流方向與假設正方向不同時,gi=-1;若無故障電流和無法明確電流方向時,那么gi=0。因此,從圖3分析來看,故障信息矩陣G為:

1.3.3 故障判斷矩陣分析
從原理來看,FTU設備之間故障的定位,主要是從父節點和子節點間最后的一個電流方向是1的FTU設備和下個FTU設備間進行定位。在這樣的條件下,若gi=1,那么dij=1具有唯一性,同時gj=-1,從而更好地判斷FTU設備之間的故障。而節點間故障的定位,主要通過上游最后一個電流方向是1的FTU設備的饋線末端節點與兄弟節點間進行定位。在這樣的條件下,若gi=1,而dij=1不具有唯一性,那么所有的gj=-1,從而更好地判斷節點之間的故障。若這兩種情況至少有一種滿足時,那么pi=1(pi為故障判斷矩陣的元素);若一種都不能滿足時,那么pi=0。此時,按照圖3的網絡描述矩陣與故障信息矩陣時,若gj=1,而dij=1存在不唯一的情況時,那么d12和d15均等于1,同時g2和g5均等于-1,最終得到故障判斷矩陣P為:

1.4 故障定位方法分析與注意事項
1.4.1 故障定位思路
在故障定位前,要明確故障定位思路。一般從故障判斷矩陣中找出元素是1的pi,其中i就是對應的FTU設備序號。按照上述兩種情況判定故障類型,判定其屬于FTU設備間的故障還是屬于節點之間的故障。從圖3可以看出,它屬于節點之間的故障,那么故障點處于1號FTU線路尾部,或者是在節點5與周邊節點之間[2]。
1.4.2 注意事項
在分布式電源配電網中,儲能裝置是故障定位的主要方法。這種方法實施中需要綜合考慮的問題較多,具有多分支、多故障、末梢故障以及環網運行等特點。因此,發生故障后需要緊密結合描述矩陣與故障信息矩陣的確定方法,采用上述方法判斷故障矩陣,再結合故障判定矩陣確定值為1的元素在整個拓撲圖中所處的位置,進而快速定位故障點所在位置。
1.4.3 故障定位方法流程
分布式電源智能配電網故障定位時的定位流程如下。若網絡描述矩陣和故障信息矩陣已知,生成故障判斷矩陣。按照得到的判定原理與判定條件,可以按照圖4的流程定位故障。圖4中,需先判斷dij和gj的值,再對ki與yi計數,判斷是否滿足相關的條件,然后輸出故障判定矩陣元素pi與ki值。若pi=1,那么表示在第i號的設備周邊區域中存在故障。最后,結合ki值判斷故障的具體區域。

圖4 故障定位流程示意圖
2 基于分段開關配置的智能配電網故障隔離方法分析
在對故障進行定位的同時,還要做好故障隔離。本實驗采用分段開關配置的方式隔離智能配電網的故障。
2.1 優化智能配電網的分段開關的配置
智能配電網故障隔離的關鍵主要在于分段開關的配置。為了優化分段開關配置,需要緊密結合智能配電網的電路特點和出線與線路特點,明確和優化分段開關的結構配置。本文采用電壓時間型的自動分段器,主要是考慮到其能在配電網失壓后能夠進行自動分合閘,且有兩種不同的運行模式。一種是配電網發生故障時,智能變電站的出線端中的重合器會開閘。利用這種自動分段器能檢測配電網失壓的情況,并實施無延時跳閘。另一種是配電網中智能變電站的出線端重合器會延時重合。此類自動分段器會根據預定的時延參數,從最近的自動分段器進行自動合閘。如果分段器合閘在配電網的故障區域,重合器能檢測配電網故障電流進行再次分閘。在故障區段的上游,相鄰的分段器會由于合閘后存在一定的時間,從而檢測失壓跳閘和閉鎖來達到隔離故障的目的。當配電網中變電站的出線和分支線開關中應用重合器時,其他配電網中的線路與用戶的分界開關應用分段器。分段器開關實施負荷開關模式,并對其實施兩級極差保護,使得重合器和分段器的跳閘延時時間為0 s。因此,在變電站出線端重合器進行開合閘保護時,需要增加一定的時延。采取這樣的方式進行分段開關的配置,不僅能有效降低成本,不依賴相關的通信技術,而且在配電網中有著良好的故障隔離效果,便于操作。但是,它需要多次進行分段開關動作,所以必須要通過科學算法對其進行強化控制,從而進一步加強配電網故障的隔離效果。
2.2 切實做好智能配電網故障區域的判定
智能配電網故障區域判定是在分段開關合理配置的基礎上進行的,因此需要在做好上述配置的基礎上,緊密結合電網傳輸和監控方面的數據信息,把分段開關保護動作信息作為故障時間信息。當某段電路出現故障時,重合器和分段器會啟動開關進行保護。智能配電網中的故障檢測裝置可以檢測遙測信號數據,同時自動將數據信號上傳到重合器。重合器采取二進制方式將配電網的故障特點輸入到分段開關。分段開關收到故障信息后會自動保存數據,并初步判斷故障描述特征,再利用分段開關中的重合器下達隔離的指令,同時控制對應電路中的分段器進行開閘。但是,實際判斷中若分段開關信息中存在錯誤,會在初次判斷的基礎上再次進行故障判斷,分段開關中的重合器就會給分段開關下達選點的命令,使得分段開關處于待工作狀態,直到再次判斷得出故障區域所在。
2.3 利用返送校對法隔離配電網故障
在做好上述判定的情況下,需要采取返送校對法對分段開關提出雙命令隔離請求。經過配電網故障區域后,變電站向分段開關節點發送相應的遙控指令,待分段開關節點信息返回后,需做好對其的校對。若與原始信息相同,那么激活每個分段開關節點的開合閘指令。智能變電站運行過程中會定期掃描分段開關所處的狀態,并將掃描數據信息傳輸到分段開關的重合器。重合器分析配電網中的相關故障信息,并給故障區域發送隔離指令,通過周而復始的掃描,確保能夠利用分段開關配置來隔離配電網的故障,從而確保配電網運行的穩定性[3]。
2.4 隔離方法可行性的驗證
2.4.1 實驗準備
為了驗證實驗提出的故障隔離方法,將其與傳統的驗證方法進行了對比。對比過程中,某智能變電站的配電網中干線與子饋線長度為16 km。從變電站出口開始,每隔4 km配置一部故障檢測裝置,且將其安裝在FTU設備中,同時安裝相應的重合器與分段器。每1 km的干線中配置了12個開關,通過人為方式設置了50處故障,然后分別采用兩種方法對其實施故障隔離操作。實驗共持續12 h。
2.4.2 實驗結果分析
通過確定的故障隔離方法,在精心做好實驗準備的基礎上開展對比試驗,并記錄兩組數據,結果如表1所示。從統計結果來看,采用所提方法比傳統的故障隔離方法效率更高,傳統的平均隔離效率只有54.5%,而所提方法的平均隔離效率為84.8%,比傳統方法高出約30%,證明了所提故障隔離方法具有快速隔離故障的作用。

表1 故障隔離數據統計
3 結 論
在分布式電源下的智能配電網中開展故障定位與隔離工作,以保證配電網運行穩定性和安全性為前提,借助聯絡開關與線路中的自動開關,有效斷開故障區域內的開關,閉合其他線路的環網開關,從而確保無故障線路段能及時恢復正常運行而達到快速恢復供電的目的。因此,為提升配網自動化水平,需要加強對智能配電網故障定位和隔離方法的研究,以保障智能配電網運行的安全性和高效性。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
