針對無人機影像的農居建筑物快速提取方法初探
2020-12-28 13:30:20徐漢卿李雨佳趙明朝
防災減災學報 2020年4期
于 浩,徐漢卿,李雨佳,馮 石,趙明朝
(1. 遼寧省地震局,遼寧 沈陽 110034;2. 遼寧省送變電工程公司,遼寧 沈陽 110024)
0 引言
近年來無人機遙感技術以其機動性強、時效性高、大分辨率影像獲取簡易等特點,在自然災害監測、地震應急等領域發展迅猛。在地震應急救災中,通過無人機搭載的影像傳感器、移動網絡數據傳輸和地面基站可實現飛行區域影像實時圖傳與數據輸出,為災害調查與損失評估提供重要的科學依據。無人機災情獲取的手段也在2008年汶川地震、2013年蘆山地震、2014年魯甸地震中得到了充分的驗證并發揮了重大作用。
遙感影像地物提取方法現已成為當今熱門的研究方向,其中建筑物地物由于在地區風俗、宗教信仰、建筑風格等方面存在較大差異,其影像光譜、幾何、紋理解譯特征難以達到普遍適用的程度,使得將建筑物信息提取及其在震害應急中的應用成為熱門研究方向。目前國內研究中,張景發等[1]對張北震區地震前后的sar圖像進行了變化檢測處理,提取了村莊建筑物的破壞信息;呂鳳華等[2]利用多特征進行航空影像建筑物提取;陳文康[3]基于深度學習的方法對農村建筑物進行遙感影像檢測;龐池海等[4]通過對建筑物特殊的陰影結構進行提取從而獲知建筑物信息;在國外研究中,A.Huertas 和R.Nevada 對遙感圖像中的線段的空間關系進行分析,Baatz 和Schape 利用多尺度分割與決策樹分類的方法對地物進行判別區分取得了良好的效果。Ren K,Sirmacek B 等人將不同方法進行融合提取建筑物,首先檢測遙感圖像中建筑物的陰影。然后在檢測結果及其一定范圍的鄰域內搜索建筑物,最后使用盒子搜索算法來確定建筑物的形狀,從而實現建筑物的分割與邊界提取。Allouche 使用神經網絡識別高密度區域的建筑物,然后使用密集三角網模擬建筑物區域的邊界,最后合并得到建筑物輪廓[5-6]。此類研究性的成果為無人機遙感技術在防災減災中的應用奠定了堅實基礎。
1 研究方法與理論概述
遙感影像分類是遙感影像處理的重要環節,也是遙感應用研究和專題圖制作的基礎,遙感影像解譯質量直接影響定量分析與專題提取的質量,只有保證遙感影像分類的精度,才能發揮遙感影像最大的效能。現今為止遙感影像提取主要分為人工目視解譯與計算機信息提取兩類,根據不同的遙感數據特性選擇不同的提取分類方法,而其中建筑物要素其差異性、復雜性的特點也成為了眾多遙感分析領域研究的重要內容。本文針對無人機二維影像中建筑物對象特點,綜合利用其光譜、紋理、幾何特征,選取了監督分類、基于規則的面向對象及LSD直線檢測算法對建筑物信息進行提取。方法特征如下表所示:
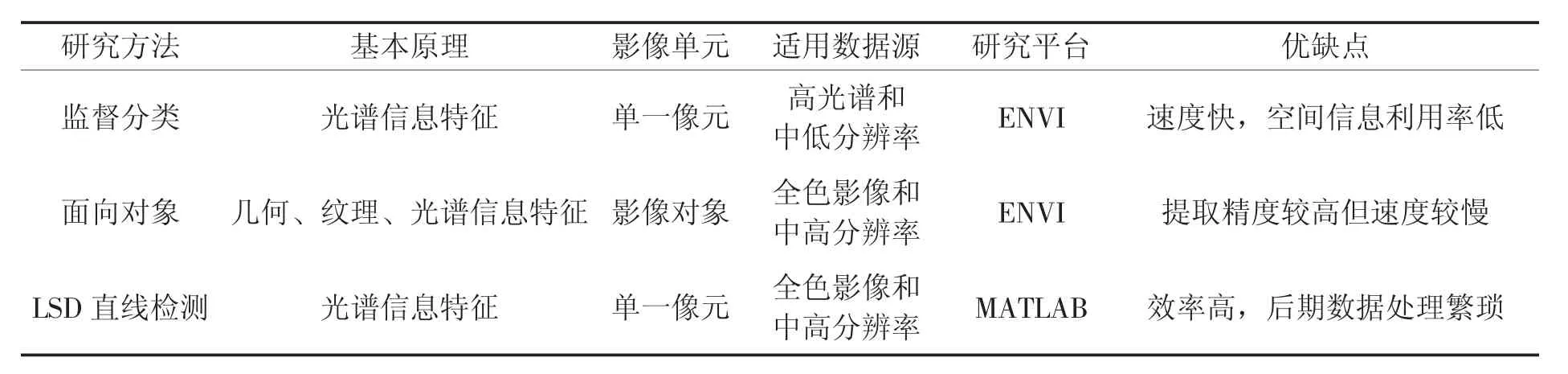
表1 建筑物提取方法比較
1.1 監督分類
監督分類是以建立統計識別函數為理論基礎,依據典型樣本訓練方法進行分類的技術。是一種基于光譜像元的分類方法,通過特征判別,選擇訓練樣本,建立判別函數從而實現影像分類,通過分類后處理,進行結果驗證。其中監督分類的判別方法有平行六面體、馬氏距離、支持向量機、最大似然法等。本次實驗采用分類精度較好的最大似然法,通過對所有像元計算其落入驗證類別樣本的概率,概率最大的相應類別即為所屬類別。其計算概率公式為:是第i 類在 g 樣本數據中出現的概率,叫作先驗概率。P(x)是在所有考慮的數據中出現向量x 的概率。
1.2 面向對象分類
面向對象的分類技術是集合臨近像元為對象用來識別感興趣的光譜要素,通過對影像的分割合并,使同質像元組成大小不同的對象。其充分利用了高分影像的空間、紋理及光譜信息對遙感影像進行分類提取,面向對象的分類步驟主要包括發現對象(影像分割、對象層次結構) 與特征提取(分類規則、信息提取)。
1.3 LSD 直線檢測法
LSD 直線檢測法是2010年Gioi 提出基于線段檢測器的直線檢測算法,該算法利用建筑物邊緣表現出的較強線性特征開展精確提取,誤檢率較低且效率極高,因此被廣泛應用于圖像處理工作中。首先對輸入圖像進行高斯降采樣來減少邊緣鋸齒狀對檢測結果的影像,然后對圖像局部邊界計算其灰度梯度Gradient 和Level-Line,公式 (1) 如下所示。
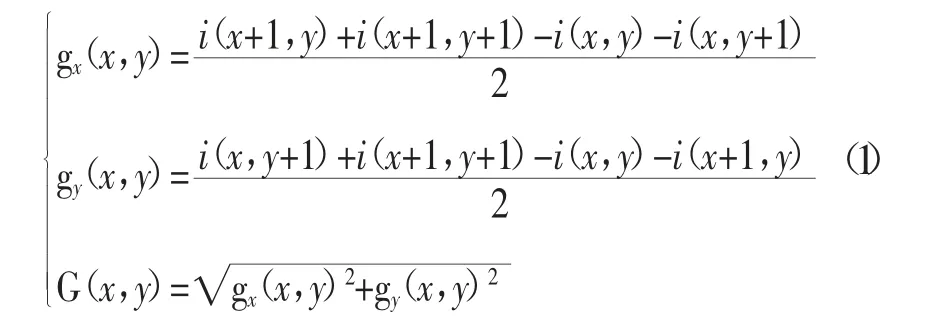
式中,i(x,y)是灰度圖像上像素點(x,y)處的灰度值,gx(x,y)為X 方向上的梯度值,gy(x,y)為Y 方向上梯度值,G(x,y)則為像素點(x,y)處的灰度梯度幅度(圖1)。

圖1 LSD 算法局部示意圖Fig.1 Local schematic diagram of LSD algorithm
而Level-Line 的角度則根據公式(2) 計算得來:

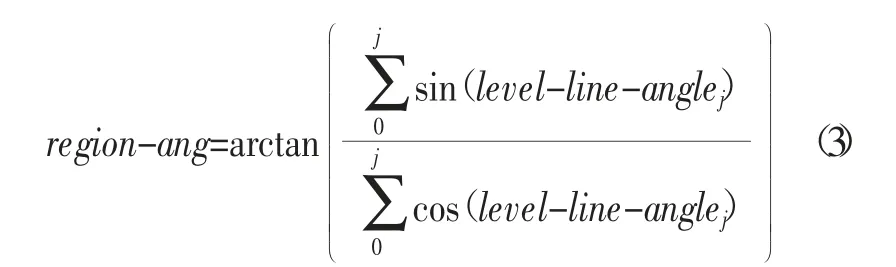
然后,根據像素梯度值排序和直線區域增長。梯度值越大,該像素點為邊緣點的概率就越大,可以作為直線檢測的種子點。從梯度值最高的種子點開始搜索,將所有種子點標記為USED,其次從每個種子點按照八鄰域搜索角度滿足且狀態為UNSED 的點形成線支撐區域(LSD, Line Segment Detector),在鄰域內角度閾值t 內且滿足整個區域方向角的點加入當前區域,并更新region-ang 的值,如式(3)所示:
每個連通域中所有像素點的水平線角度變化不能超過閾值t,每個線支持區域都是線段檢測的候選對象。如圖2 所示,綠色區域、橙色區域和藍色區域各是一個線支持區域。

圖2 LSD 區域增長示意圖Fig.2 Schematic diagram of LSD regional growth
最后,通過計算虛警數(NFA,Number of False Alarm) 指數進一步確定目標區域擬合的矩形,進而得到目標影像中直線。采用LSD 直線檢測算法檢測出的測區內的直線段。
2 遙感影像建筑物提取
2.1 數據來源
本實驗采用2019年8 月遼寧省大連市長海縣大長山島鎮城嶺村無人機遙感影像作為數據源,實驗區域視野開闊,植被覆蓋范圍60%-65%,區域測量范圍0.3177 平方公里,實驗采用大疆精靈4PROv2.0 無人機,采用軟件DJI Pilot 設置飛行參數,控制無人機自動起飛并執行航拍任務,姿態信息設置為飛行高度設置100m、飛行速度控制5m/s, 航向重疊率設置為80%,旁向重疊率設置為80%,主航向角度設置為0°,邊距設置為20m,飛行架次1 次,航線長度6125 米,采集耗時30 分鐘。實驗影像具備RGB 通道,空間分辨率0.26m,單張影像尺寸512×512,共計308 張影像。
2.2 數據預處理
實驗數據采用pix4dmapper 軟件完成影像快拼中相機校驗、畸變校正、空三計算、區域網平差計算、勻色生成4 通道RGB 影像(圖3)。在ENVI 中利用工具layer stacking 工具對影像進行真彩色波段合成(圖4),線性拉伸2%顯示,充分表現各種地物影像特征的差別,確保訓練樣本選擇的準確性。

圖3 無人機正射影像數據Fig.3 UAV orthophoto data

圖4 處理后實驗數據Fig.4 Experimental data after processing
2.3 監督分類
監督分類處理流程為類別判定—樣本選擇—分類器選擇—影像分類—分類后處理—結果驗證。類別判定為道路、植被、建筑物三類,分別創建感興趣區域的樣本數據共89 個純凈像元,計算樣本可分離性分別為JZW and DL-1.62947158 JZW and ZB-1.90197050 ZB and DL-1.98330353(測試區域屋頂與道路光譜表現相似,可分離性較低,數值越接近2 代表可分離性越高) 分類器利用最大似然法,進行遙感影像提取,分類效果見圖5。分類處理通過Majority/Minority Analysis 主次要成分分析工具與Clump Classes 聚類處理工具分別對分類影像進行小斑塊去除,窗口尺寸分別調整3×3,15×15,中心像元為1,局部去除效果如圖6 所示,聚類處理通過將分類進行膨脹合并,然后用變換核對分類圖像進行腐蝕操作,解決了類別信息被臨近類別的編碼干擾造成的空間連續性差的問題。在道路剔除與區域植被剔除效果上優于主成分分析的斑塊去除[7-9]。
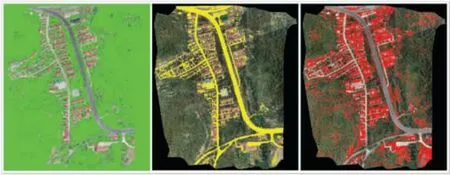
圖5 植被、道路、建筑物提取效果Fig.5 Extraction effect of vegetation, road and building

圖6 分類后處理(小斑塊剔除) 效果Fig.6 Effect of classification post-processing(small plaque removal)
2.4 基于規則的面向對象分類
基于規則的面向對象分類流程為發現對象(影像的閾值分割、合并),特征提取(定義要素與規則設定),導出要素。使用Feature Extraction(Rule Based) 工具,本實驗基于紋理邊緣檢測算法,最終設定分割閾值為60,合并閾值為90,紋理內核設定為6,生成模擬影像,規則設定中本實驗分別通過歸一化植被指數 (Normalized Difference)、 矩 形 化 程 度(Rectangular Fit)、面積(Area)、空間延長線(Elongation) 四項指標約束建筑物提取范圍,分別剔除了大部分植被、道路、田地及碎小斑塊,閾值范圍見圖7(各幅遙感影像亮度值、紋理互有差異,各項閾值設定會產生不同程度的變化) 最后進行分類后處理,生成建筑物矢量信息,提取效果如圖8、圖9 所示[10-13]。
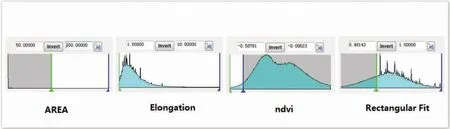
圖7 規則閾值設定Fig.7 Rule threshold setting

圖8 面向對象提取效果Fig.8 Object-oriented extraction effect

圖9 局部提取效果Fig.9 Local extraction effect
2.5 LSD 直線檢測法
本次LSD 算法實驗截取影像局部建筑為例,通過Matlab 平臺進行,其算法流程如圖10所示。
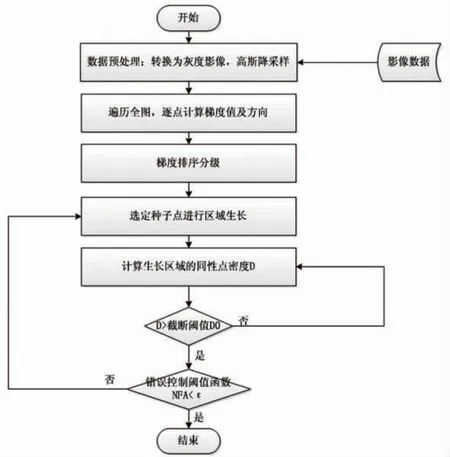
圖10 LSD 實驗算法流程圖Fig.10 Flow chart of LSD experimental algorithm
圖10 中可見為了解決數字離散圖像的階梯效應,即圖像放大過大時出現鋸齒狀直線,預處理過程中添加了高斯降采樣流程,本文實驗中降采樣率設置為0.8,完成圖像處理。區域生長依據章節1.3 中所述在八鄰域方向搜索生長更新并進行矩形逼近,確定矩形的中心和矩形的朝向后,包含區域所有點的最小矩形即為逼近得到的矩形。同性點密度閾值判定即為直線區域形態和屬性判斷條件。錯誤控制閾值函數NFA 判定可以改善矩形形狀并得到最終實驗結果,其中紅線標注位置即為檢測直線結果如圖 11 所示[14-16]。
3 實驗結果與分析
本次實驗區域為實地調研區域,因實驗目的為方法研究,故實驗區域選取較小,實驗結果以實地調研數據為基準對以上方法進行判定。(LSD 直線檢測采用數據為區域數據,無法比對實驗結果)
實驗結果表明監督分類、基于規則的面向對象提取及LSD 直線檢測三種方法均能夠在無人機正射影像中較為準確的確定建筑物形狀與空間位置,提取精度上基本滿足用戶的實際使用需求。且三種建筑物提取的方法在工序與精度上均具備較大的研究空間。
監督分類的重要環節為樣本選取,耗時工序為樣本優化檢驗與評估,耗時較短,但因其主觀因素較強,影像利用信息較為單一,故受原始影像質量影響較大,分類提取的精度較低,但分類精度可在不斷修改檢驗訓練樣本基礎上獲得明顯改觀。
基于規則的面向對象提取的重要環節在于尺度分割合并與規則設定,耗時工序為規則設定,耗時較長,但面向對象分類方法在處理光譜信息不豐富的高分辨率影像上具備一定的優勢,某種程度上解決了“同物異譜,同譜異物”對影像分類產生的影響,其不會過度依賴原始影像數據,但該方法在植被指數效果判定、尺度分割與閾值設定上具有較強的人為認知的主觀因素,該方法如果能在尺度閾值設定與經驗分析合理的情況下,分類效果有望接近目視解譯結果。
Lsd 直線檢測的重要環節為區域生長及終止生長條件判定,耗時工序為閾值設定與檢測后處理,耗時較長,但多方法融合應用后,提取精度有顯著提升,本次實驗采用LSD 直線檢測算法檢測結果存在過多背景冗余信息,空地、雜物等直線信息或直線分割成多條短線段的情況時有出現,無法直接獲取建筑物閉合輪廓及面積信息,故該方法在后期的冗余信息剔除篩選與直線段的聚類合并處理上需要開展更深入的研究。
目視解譯作為以上方法的對比方法其耗時工序為人工判別與手動提取,其受遙感影像范圍影響明顯,小范圍識別準確度高,時效性強,但無法滿足震后應急中快速影像信息提取的實際需求。
本次實驗遙感影像數據源較為單一,無法獲取高程數據,實驗區域房屋建筑種類及屋頂顏色、形狀表現差異較大,這給建筑物提取工作帶來了較大的難度,但在反映遼寧農居建筑特點的差異性較小的人字屋頂及平頂的農居建筑物上,提取效果較為理想,建筑邊緣輪廓提取較為準確,提取速度較為理想。
遼寧局于2019年初成立現場無人機組,其在地震現場工作中主要負責完成危險區調研任務與日常演練工作,調研航拍任務主要以正射數據收集、三維建模存檔為主,演練航拍任務主要以熟練操作、單體俯拍、建筑群俯拍為主,截至目前,累計飛行架次30 余次,累計飛行時長20 小時,累計飛行面積約4.5km2,今后還應充分調研遼寧農居建筑物結構特點,通過增設抽樣點,對比操作流程,優化尺度分割與閾值設定,開展針對性無人機演練,在規律與實踐中尋找最優方案,提升應急遙感產品的時效性。
4 結語
本文通過對無人機正射影像采用監督分類、面向對象及LSD 直線檢測法對建筑物進行分類提取,提出了一套對地物簡單分類的半自動處理流程,提升了地物信息的提取速度,為后續開展自動化提取工作奠定了理論基礎。
在無人機高分影像建筑物提取的過程中發現了諸多由建筑物本身特殊性及高分影像的數據源導致的問題,無形的給建筑物提取帶來了不小的挑戰與困難,只有充分認識了解現階段提取技術的難點與問題,才能突破提取速度與精度上的瓶頸。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
