基于ADAMS的行星齒輪傳動(dòng)動(dòng)力學(xué)研究
2020-12-28 12:53:34馮靜娟湯淋淋
機(jī)械工程與自動(dòng)化 2020年6期
關(guān)鍵詞:方向
馮靜娟,湯淋淋
(硅湖職業(yè)技術(shù)學(xué)院,江蘇 昆山 215300)
0 引言
行星齒輪傳動(dòng)機(jī)構(gòu)作為常見(jiàn)的傳動(dòng)裝置已經(jīng)被廣泛應(yīng)用于制造業(yè),其結(jié)構(gòu)較為緊湊、運(yùn)動(dòng)較平穩(wěn)且傳遞功率大[1-2]。但是由于其結(jié)構(gòu)較為復(fù)雜,在長(zhǎng)時(shí)間高速運(yùn)轉(zhuǎn)工況下,容易發(fā)生系統(tǒng)故障,因此需要針對(duì)行星齒輪傳動(dòng)中的齒輪副以及輸出特性進(jìn)行研究,分析其在運(yùn)轉(zhuǎn)過(guò)程中的角速度、嚙合力以及頻率,為后續(xù)行星齒輪的動(dòng)強(qiáng)度校核提供數(shù)據(jù)參考[3]。本文基于ADAMS對(duì)行星齒輪傳動(dòng)進(jìn)行動(dòng)力學(xué)研究。
1 基本參數(shù)

2 前處理
在進(jìn)行動(dòng)力學(xué)仿真之前需要對(duì)模型進(jìn)行處理,去除一些傳動(dòng)過(guò)程中不影響整體傳動(dòng)效果的零件以及其他連接設(shè)備,其簡(jiǎn)化模型如圖1(a)所示。在動(dòng)力學(xué)仿真中,最重要的就是設(shè)置正確的運(yùn)動(dòng)關(guān)系,因此這里主要進(jìn)行運(yùn)動(dòng)副的設(shè)置。行星齒輪傳動(dòng)中一共有6個(gè)轉(zhuǎn)動(dòng)副和6個(gè)齒輪副,如圖1(b)所示。轉(zhuǎn)動(dòng)副具體為:R1:行星架與地面之間的固定旋轉(zhuǎn)副;R2:行星架與太陽(yáng)輪之間的旋轉(zhuǎn)副;R3:內(nèi)齒輪與行星架之間的旋轉(zhuǎn)副;R4、R5、R6:行星架與行星輪之間的旋轉(zhuǎn)副[4]。齒輪副具體為:太陽(yáng)輪和3個(gè)行星輪嚙合的齒輪副G2、G4、G6;行星輪和內(nèi)齒輪嚙合的齒輪副G1、G3、G5。把輸入軸的角速度設(shè)為3 840 °/s,輸出軸施加360 Nm(行星齒輪給定值)的扭矩,載荷步時(shí)間設(shè)為0.8 s,共計(jì)算500步[5]。
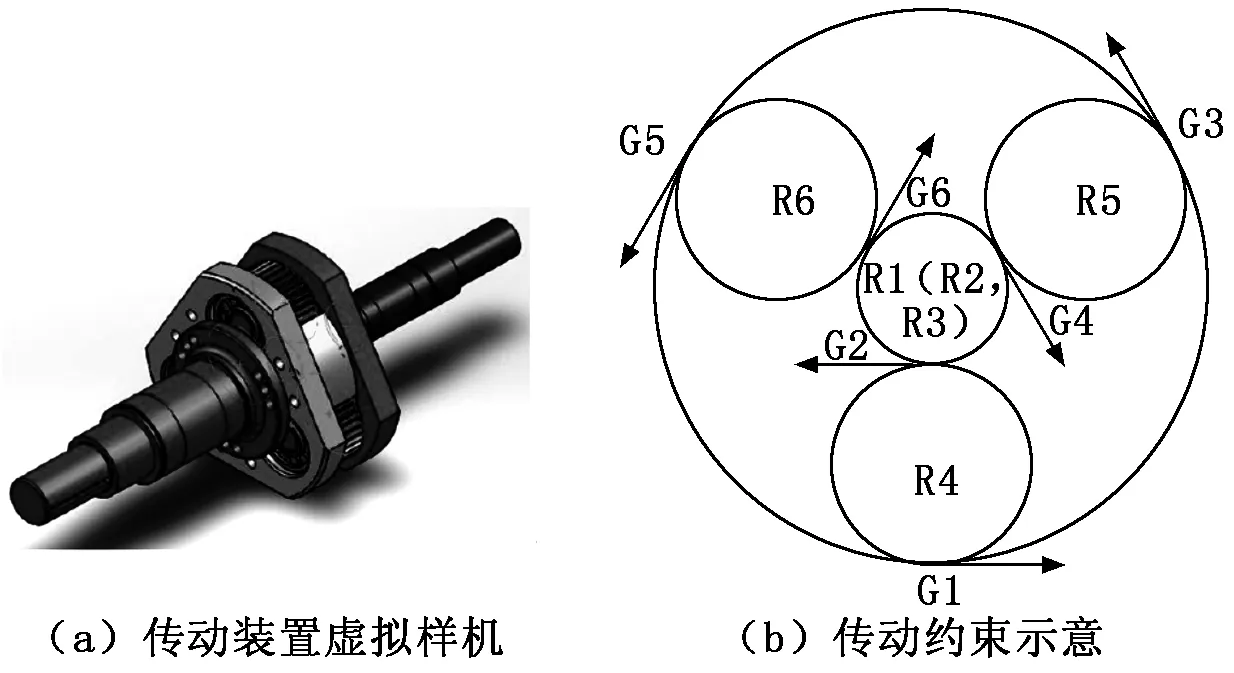
圖1 行星齒輪減速器虛擬樣機(jī)及傳動(dòng)約束
3 仿真結(jié)果
3.1 傳動(dòng)裝置角速度分析
仿真得到的輸出軸和行星輪的角速度分別如圖2和圖3所示。

圖2 輸出軸角速度
從圖2和圖3中可以看出:輸入角速度為定值3 840 °/s,輸出角速度為711.143 °/s,行星齒輪的角速度恒定為1 129.468 °/s。通過(guò)相關(guān)的理論來(lái)分析對(duì)應(yīng)轉(zhuǎn)速,因?yàn)檩斎胼S以及太陽(yáng)輪之間一直被浮動(dòng)套連接著,與此同時(shí)輸出軸以及內(nèi)齒輪之間也由螺栓相連,所以它們彼此之間的轉(zhuǎn)速都是相同的。而且正是由于輸入軸的轉(zhuǎn)速是不變的,所以其余相關(guān)部件的轉(zhuǎn)速也是固定不變的,都做勻速圓周運(yùn)動(dòng)。
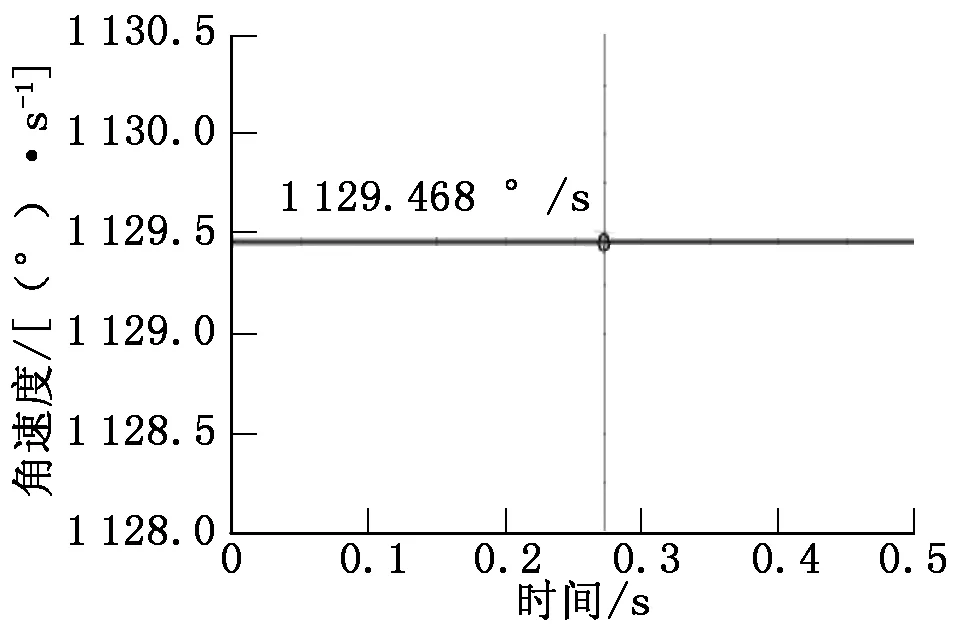
圖3 行星輪角速度
仿真和理論計(jì)算得到的輸出軸和行星輪角速度對(duì)比如表1所示。由表1看出二者的誤差分別是0.041%和0.02%。計(jì)算得到的輸入軸和輸出軸的角速度之比為3 840/711=5.41,仿真得到角速度之比為3 840/711.143=5.4,誤差約為0.2%(不到1%,可忽略不計(jì))。所以通過(guò)分析這些數(shù)據(jù)能夠得到結(jié)論:虛擬樣機(jī)具有可靠性。

表1 仿真和理論計(jì)算得到的角速度對(duì)比
3.2 嚙合力與頻域分析
圖4和圖5分別為行星輪與太陽(yáng)輪在周向和徑向的嚙合力隨時(shí)間的變化曲線。
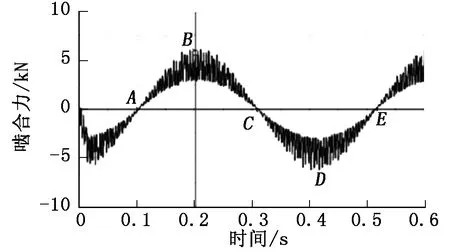
圖4 行星輪與太陽(yáng)輪間周向(X方向)嚙合力曲線
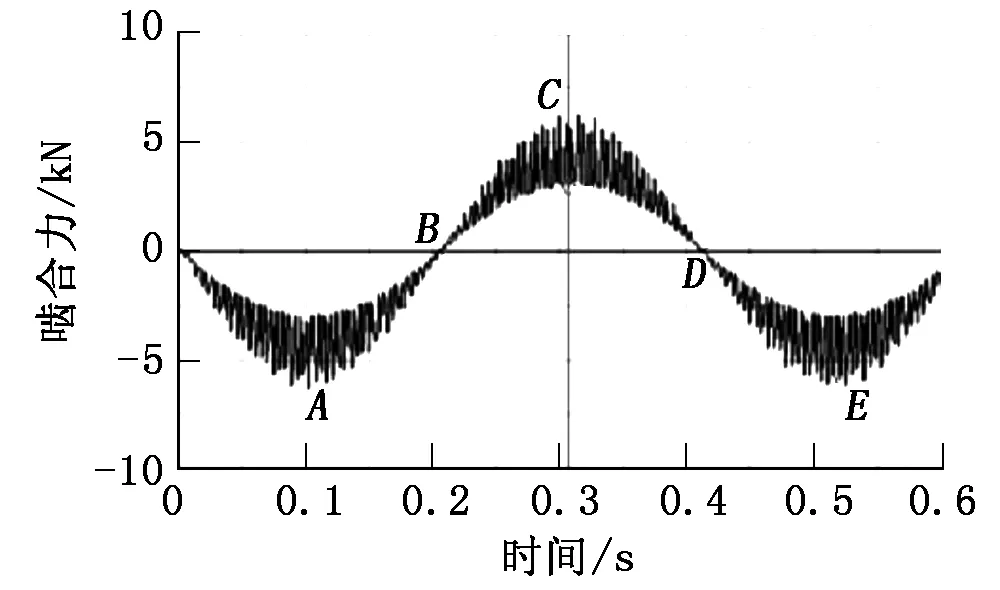
圖5 行星輪與太陽(yáng)輪間徑向(Y方向)嚙合力曲線
由圖4和圖5可以看出:從A到E為一個(gè)周期,太陽(yáng)輪與行星輪在A處開(kāi)始進(jìn)行嚙合;從A-B的整個(gè)過(guò)程中,X方向嚙合力由A點(diǎn)開(kāi)始逐漸增大至B點(diǎn)達(dá)到了它的最大值,而Y方向的嚙合力則恰恰相反,從A點(diǎn)開(kāi)始不斷減小至B點(diǎn)低至它的最小值,而在此過(guò)程中,X和Y方向嚙合力的方向均未產(chǎn)生改變;在B-C的整個(gè)過(guò)程中,X方向嚙合力由B點(diǎn)開(kāi)始減小直至C點(diǎn)低至它的最小值,而Y方向則恰恰相反,從B點(diǎn)開(kāi)始不斷增大至C點(diǎn)達(dá)到它的最大值。行星齒輪減速器行星齒輪與太陽(yáng)輪齒輪副間嚙合力呈正弦或者余弦函數(shù)變化,所以通過(guò)分析這些數(shù)據(jù)能夠得到結(jié)論:虛擬樣機(jī)具有可靠性。
圖6和圖7分別為仿真得到的行星齒輪與太陽(yáng)輪嚙合副G2周向力和徑向力的頻域圖。
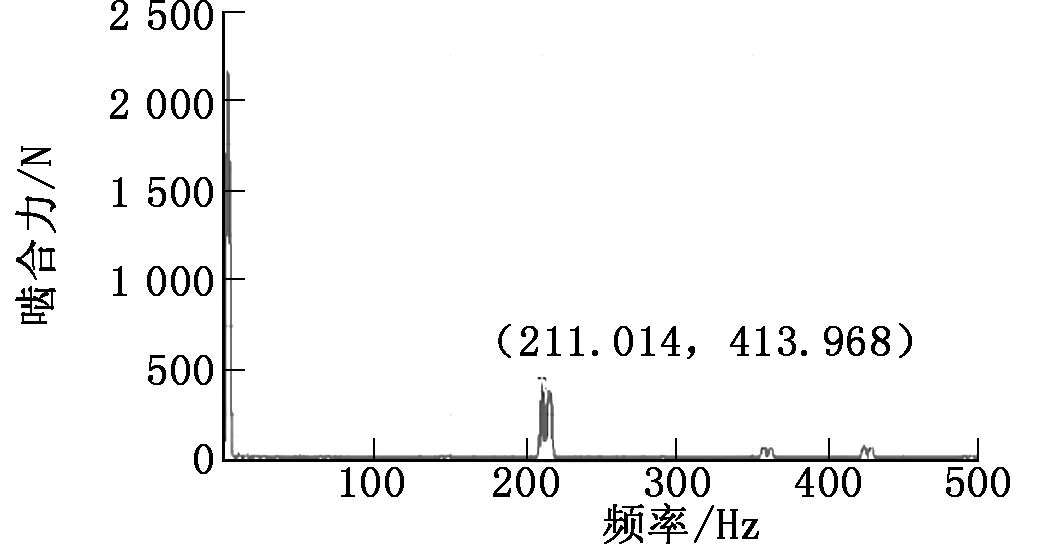
圖6 行星輪與太陽(yáng)輪嚙合副G2周向力(X方向)頻率
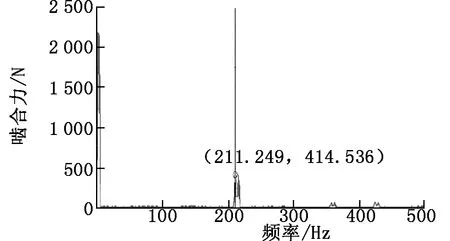
圖7 行星輪與太陽(yáng)輪嚙合副G2徑向力(Y方向)頻率
由圖6和圖7可知:當(dāng)圓周力為413.968 N時(shí),頻譜發(fā)生突變,此時(shí)頻率為211.014 Hz;當(dāng)徑向力為414.536 N時(shí),頻譜發(fā)生突變,此時(shí)頻率為211.249 Hz。對(duì)比二者的頻譜線,可以看出二者的頻譜線具有相同的變化趨勢(shì),且發(fā)生突變的位置趨于一致,因此可以得出太陽(yáng)輪與行星齒輪的齒輪副圓周力和徑向力的頻譜具有一致性,虛擬樣機(jī)具有可靠性。
4 結(jié)論
(1)對(duì)比仿真值和計(jì)算值,輸出軸的角速度和行星齒輪的角速度的誤差分別是0.041%和0.02%,傳動(dòng)比誤差小于1%。
(2)行星齒輪減速器行星齒輪與太陽(yáng)輪齒輪副間嚙合力呈正弦或者余弦函數(shù)變化。
(3)圓周力和徑向力在X、Y方向上的頻譜具有一致性,虛擬樣機(jī)具有可靠性。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂(lè)天地(音樂(lè)創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50