基于室內大空間消防系統的三目定位法的研究
2020-02-02 04:00:42蔡道鑫王厚非黃曉陽曹峰源楊保華
價值工程 2020年3期
蔡道鑫 王厚非 黃曉陽 曹峰源 楊保華
摘要:受國內經濟飛速發展及中國制造2025戰略需要,室內大空間消防設備備受各行各業青睞。雙目定位系統無法有效響應較大室內空間的應用需求,因此需要對三目立體定位的室內大空間標定與優化方法進行相關的研究。首先通過通過坐標矩陣轉換,對物項在空間點坐標、圖像點坐標進行運算,得到物項在空間中的具體布置,通過得出三目定位系統結構參數與分析數學模型,建立三目立體定位系統,并將將結構參數與測量精度數學模型內分析,同時給出了用于大空間室內消防的三目定位煙霧報警器模型。
Abstract: By the rapid development of the domestic economy and the strategic needs of China Manufacturing 2025, indoor large space fire fighting equipment is favored by all walks of life. However, for a long time, domestic and foreign scholars have focused on the research of binocular positioning system, which can not effectively respond to the application needs of large indoor space. Aiming at the status of indoor large space fire protection, this paper studies the calibration and optimization methods of indoor large space for three-eye positioning.
關鍵詞:室內大空間;消防;三目定位
Key words: large indoor space;fire control;three-eye location
中圖分類號:TP277? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2020)03-0245-03
1? 研究現狀
利用雙攝像機模擬生物視覺的系統稱之為雙目視覺測量系統,此系統更適合測量大尺寸目標物的輪廓[1],該理論由美國麻省理工學院的 Marr 教授首次提出。攝像機組成數大于或等于三臺的系統稱之為多目立體視覺系統,多目立體視覺系統擁有較多優點,如涵蓋面廣、響應時間極短、信息量豐富、高度自動化等,多用于大空間檢測、醫療醫學、軍事偵察、VR等領域。借助三組攝像機來增加多層次的空間邊界約束,有效降低雙目視覺模型、單目視覺模型存在的定位匹配差異缺陷[2,3]。
本文提出一種基于位置分組的多攝像機標定方法,利用攝像機相鄰位置關系對攝像機進行隨機分組,對各組攝像機進行標定來生成初始參數,隨后通過全部攝像機對公共可視平面的綜合校正,將各組攝像頭定位至絕對坐標體系中,實現攝像機組外部參數的統一化。
基本方法:
①以三目定位系統為基礎的室內大空間定位方法探究。
基于大空間分離式標定應用原理,構建在大空間應用場景中的標定數學運算模型,采用羅德里格矩陣實現分離式標定的矩陣轉變,依托空間測量原理實現攝像機在三目定位體系中的區域定位。最后編制大空間分離式標定的操作步驟,構建驗證模型,并對測試數據進行驗證和分析確認。
②以三目定位系統為總體的全局參數優化分析。
基于三目定位系統中各組成部件的運行參數,搭建三目立體定位系統結構參數的數學模型,將數學問題現從實際問題中提取出來。將系統誤差分析理論同實際問題相結合,得出二者之間的關系,而關系圖則以誤差傳遞系數最小化準則為基礎求得,且本系統的結構參數、鏡頭參數等對系統精度的影響依舊以分布關系圖為基礎進行分析,確定本系統的最優結構參數取值范圍。
2? 系統運行原理及點位標定系數
2.1 系統運行原理
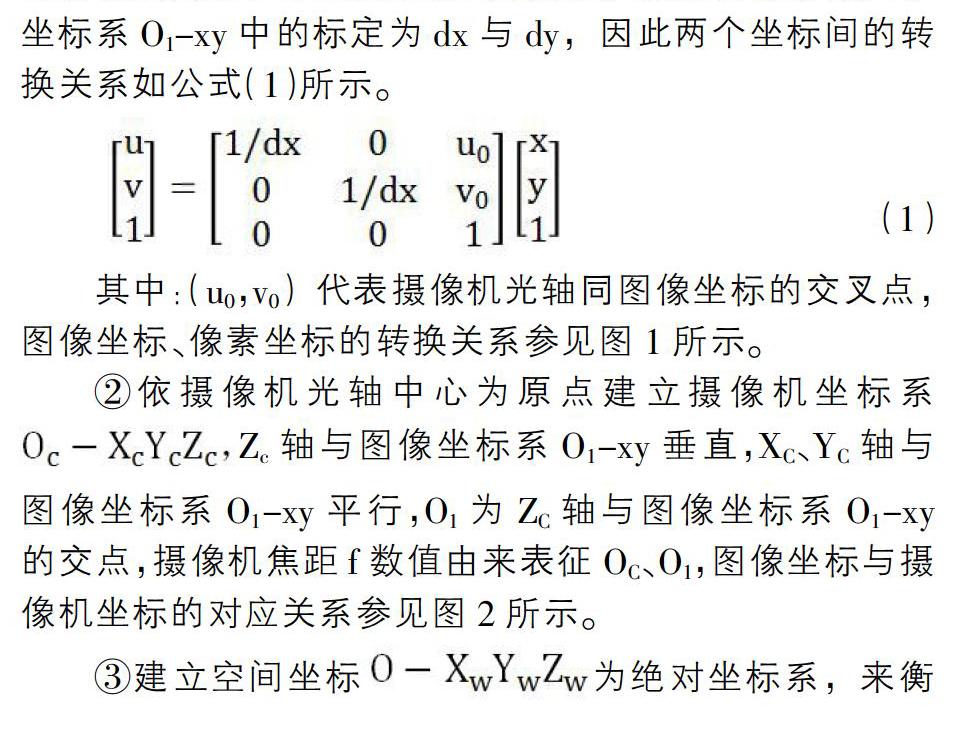
①攝像機組在運行期間,將讀取的圖像信息以矩陣形式存儲于計算機中。采用像素大小來表征圖像的亮度,并以像素作基本單位形成矩陣的有效元素。采用灰度來表征黑白圖樣的亮度,采用三原色來表征彩色圖樣的亮度。依原點O0生成像素坐標系O0-uv,其中采用u軸表征像素點在矩陣中的列數,v軸表征像素點在矩陣中的行數。如具體應用場景需獲取更精確的像素點定位,則需生成以單位長度來表征的坐標,簡稱為圖像坐標系[4]。將圖中一點作為原點O1構建圖像坐標系O1-xy,該坐標系中x軸對應于原像素坐標系u軸,坐標系中y軸對應于原像素坐標系v軸。假使圖像是在理想攝像機運行工況下,O1位于攝像機光軸同圖像面的交叉點,并考慮攝像機運行過程中的偏差,因此補償其與主光軸的距離偏差。設定某像素對應于坐標系O1-xy中的標定為dx與dy,因此兩個坐標間的轉換關系如公式(1)所示。
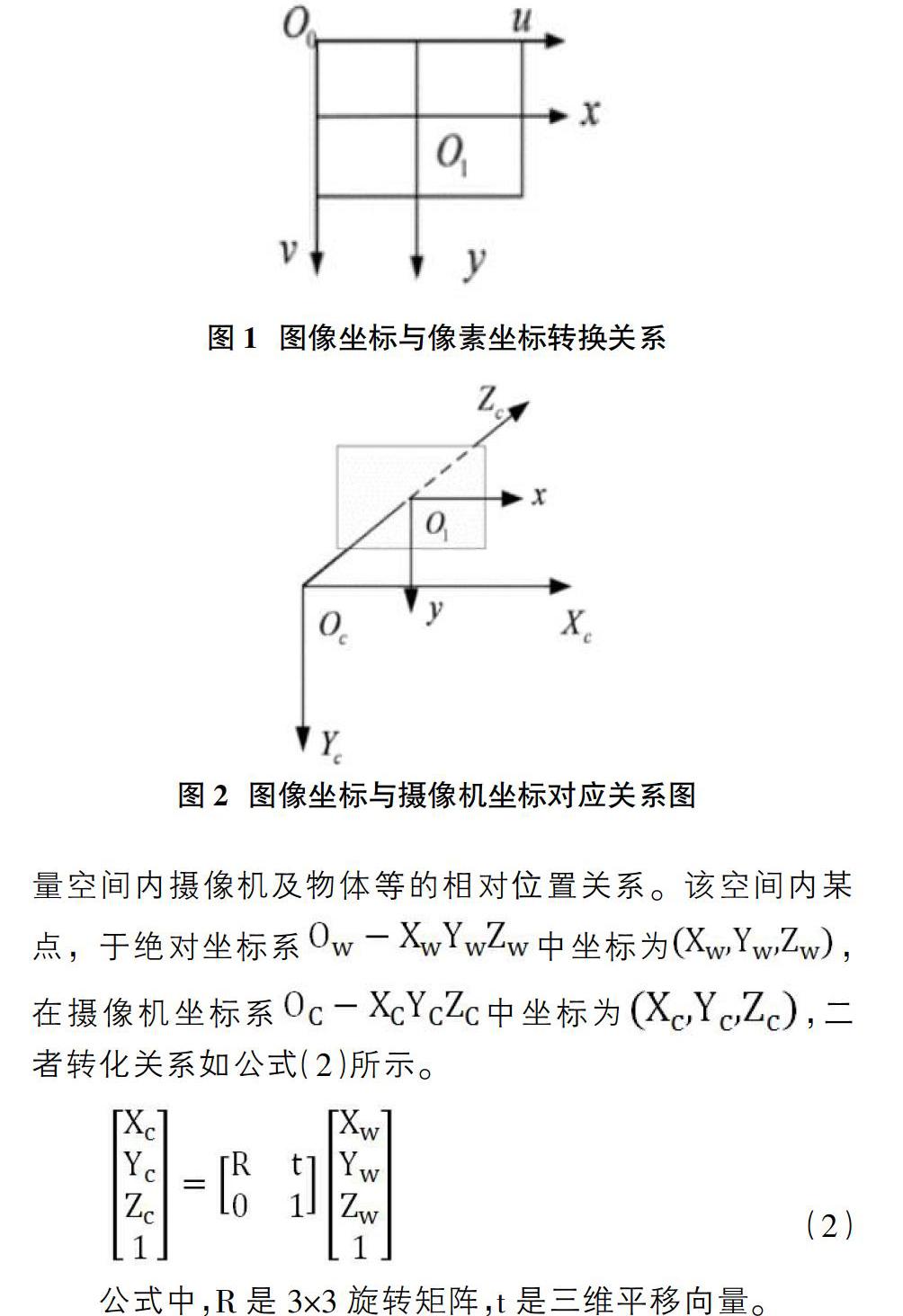
2.2 三目定位系統參數
三目定位系統測量目標在于,通過攝像機采樣圖片中物像相對空間位置,采用變換矩陣原理來定位物體在空間的具體位置。該變換矩陣集成于攝像機的成像模型內,并表征了攝像機在空間區域內的相對位置和攝像機性能參數。
攝像機成像實現原理包括線性、非線性兩類。其中小孔成像技術作為理想狀態下的線性模型在現實中幾乎無法實現,由于實際的攝像機制造過程中攝像機內部構造與鏡頭會形成不可控畸變,因此在實際應用層面,一般運用非線性成像模型。
2.2.1 大視場標定算法
本文采用非線性成像模型作為攝像機的運算模型,依據實際測量場景需考慮攝像機的徑向、切向畸變問題。在攝像機非線性成像模型中,內參矩陣一般考慮像素坐標u值、非正交v值,非正交性值在一般情況下很小。但處于實際測量場景時,物距達到焦距的數千倍,導致測量數據中的非正交值成數千倍的增加,而使成像標定數據同真實數據的差距較大。所以在運算攝像機內部參數時忽略u、v軸非正交參數,即設定內參矩陣內的非正交參數為0。
攝像機中內參矩陣描述為:
2.2.2 定位方法探究
綜上所述,定位過程如下所示:
①選取數個棋盤形狀的小平面標定板,分別布置于被測量物項中心區域、四周不同區域。將中心區域的標定板設定為主標定板,將該點坐標系設定為“絕對坐標系”。同時將四周區域的標定板設定為區域標定板,該坐標系設定為“區域坐標系”。
②運行三目定位系統對全部標定板進行采樣。
③運用外離式大視場標定運算模型對主標定板進行采樣標定,運算得到內參參數。
④運用分離式大視場標定運算模型對區域標定板進行采樣標定,運算得到外參參數,同時得到各區域標定坐標點。
⑤運用羅德里格矩陣來運算“絕對坐標系”同“區域坐標系”間的轉換矩陣。
⑥重復第5步,利用轉換矩陣將區域標定的坐標點轉變至絕對坐標系內,運算得到外參。
3? 結構參數模型優化
3.1 結構參數分析
攝像機視覺系統內置的結構參數,對物項、各組攝像機相對位置的測量精度存在較大的影響約束。三目定位系統技術主要通過坐標矩陣轉換,對物項在空間點坐標、圖像點坐標進行運算,得到物項在空間中的具體布置。當攝像機相對位置改變時,該系統內的物項、各組攝像機間的位置記憶物體成像點在絕對坐標系中值也同時變化,所以可以得出三目定位系統結構參數影響著測量的精度。而建立三目立體定位系統結構參數則需要分析數學模型,將結構參數與測量精度數學模型內分析。
3.2 結構參數數學模型
采用三角法建立本系統結構參數的數學模型可分析出系統內結構參數對系統實際測量精度的影響,并將其成功應用于室內大空間消防的定位系統之中如圖3所示。圖4中,C1,C2,C3對應攝像機-1、攝像機-2、攝像機-3在空間中的區域位置,依C1為原點生成坐標系o-xyz,將C1點同C2點方向作為x軸正方向,將B1視作攝像機-1、攝像機-2初始基線,將B2視作攝像機-1、攝像機-3初始基線,C″3為C3在xoz平面的投影,d1,d2分別為m′到B′1與B′2的空間距離。設定M點為被驗證物項,M″視作M至xoz面的投影,wl作為攝像機-1同x軸夾角,w2作為攝像機-2同x軸夾角,分別代表物項M于xoz面上投影M″同攝影機1、攝影機2連接線與x軸之間的角度,?琢1,?琢2為M與C1,C″3之間夾角,θ為B′2與z軸的夾角,γ為基線B2與B′2之間的夾角。間夾角,θ為B′2與z軸的夾角,γ為基線B2與B′之間的夾角。
4? 結論
本文從實際出發,提出基于本系統的大視場標定方法,在此方法的基礎上給出優化方法。該優化方法提出了最佳結構參數模型同時對定位偏差進行分析,討論了攝像機成像定位過程中偏差檢測原理,給出結構參數最優取值范圍。綜上所述,為解決實際問題,首先提出定位方法,再將此方法優化。給出最優結構參數和取值范圍的同時亦給出結構參數的最佳取值范圍且分析了定位偏差,并成功應用到室內大空間定位的消防系統之中。
參考文獻:
[1]胡漢平.雙目立體測距關鍵技術研究[D].長春:中國科學院研究生院(長春光學精密機械與物理研究所),2014.
[2]李明金.基于計算機視覺的空間坐標測量系統研制[D].桂林:桂林電子科技大學,2010.
[3]陳春.料堆測量系統三維重建算法研究[D].沈陽:東北大學,2011.
[4]趙昕揚.用于手術導航的高精度三目視覺定位方法研究[D].南京:南京理工大學,2017.
