壓電陶瓷驅動系統的設計與研究
2020-12-28 11:49:40陳姝雨王學亮
現代電子技術 2020年24期
陳姝雨 王學亮
摘 ?要: 針對光刻機投影物鏡中使用壓電陶瓷對像質補償鏡組進行精密定位控制的需求,設計一種壓電陶瓷驅動系統,并著重對其精度性能進行了分析與研究。首先對系統進行了誤差項分解,然后對各誤差項進行詳細的理論計算,最后將所有誤差項的影響按最差情況合成,所得結果滿足設計要求。進而試制了系統樣機,并對其性能進行實驗驗證,結果表明,壓電陶瓷驅動系統的誤差不超過80 mV,與理論分析的結果符合,滿足壓電陶瓷驅動系統的設計指標。
關鍵詞: 壓電陶瓷; 驅動系統; 系統設計; 誤差項分解; 精度分析; 實驗驗證
中圖分類號: TN876?34 ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)24?0034?04
Design and research of piezoelectric ceramics driving system
CHEN Shuyu1, WANG Xueliang2
(1. Northeastern University, Shenyang 110819, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
Abstract: In allusion to the requirement that the piezoelectric ceramics is used in the projection objective of lithography machine to execute precise positioning control of image quality compensating mirror group, a piezoelectric ceramics driving system is designed and its accuracy performance is analyzed emphatically. The error term is decomposed for the system, and then each error term is calculated theoretically in detail. The influence of all the error terms is synthesized according to worst case, and the obtained results meet the design requirements. A prototype of the system was trial?manufactured and its performance was verified by experiments. The results show that the error of the piezoelectric ceramics driving system is less than 80 mV, which is consistent with the theoretical analysis and meets the design indexes of the piezoelectric ceramics driving system.
Keywords: piezoelectric ceramics; driving system; system design; error term decomposition; precision analysis; experimental verification
0 ?引 ?言
光刻機作為極大規模集成電路工藝關鍵設備,為了滿足10 nm量級特征尺寸的半導體加工需求,其投影物鏡對成像質量的要求極為嚴苛,常常需實現納米量級的系統波相差。但是在光刻投影物鏡的實際加工、裝配及工作過程中不可避免地存在元件公差、裝配誤差以及外部環境引起的各種像差,因此會在投影物鏡中配置位置可調的鏡片予以補償[1?4],通常其定位執行器應具有10 nm量級的典型定位精度。
壓電陶瓷[5?6]材料以其無磁性干擾、定位分辨率高、發熱量小等特點廣泛用于光刻機投影物鏡中像差補償鏡的定位執行器[7?13]。本文針對上述應用場景分析設計一種壓電陶瓷驅動系統,并對其進行了實驗驗證。
1 ?系統設計
1.1 ?設計目標
根據光學設計和結構設計的計算結果,要求某光刻機投影物鏡的像差補償系統具有優于5 μm調節行程、優于550 N的輸出力以及10 nm量級的定位分辨率。因此選擇PI公司P?885型壓電陶瓷作為定位執行器。
P?885.11型壓電陶瓷的輸入電壓為100 V,位移6.5 μm。根據驅動P?885型壓電陶瓷實現10 nm量級精密定位的要求可知,壓電陶瓷驅動系統應滿足以下指標:
1) 驅動系統的輸出電壓為0~100 V;
2) 驅動系統的輸出精度為154 mV;
3) 驅動系統帶寬為100 Hz。
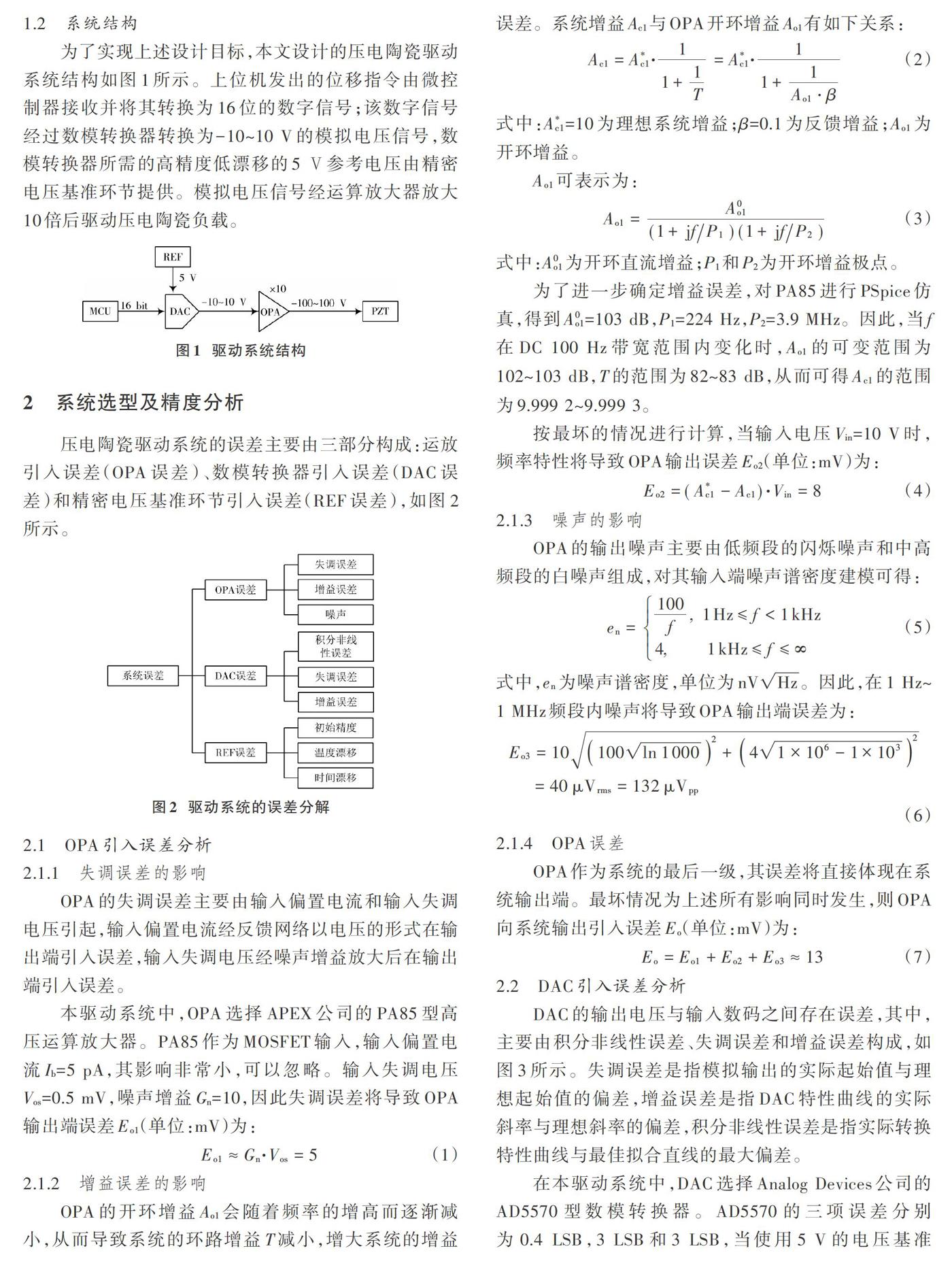
1.2 ?系統結構
為了實現上述設計目標,本文設計的壓電陶瓷驅動系統結構如圖1所示。上位機發出的位移指令由微控制器接收并將其轉換為16位的數字信號;該數字信號經過數模轉換器轉換為-10~10 V的模擬電壓信號,數模轉換器所需的高精度低漂移的5 V參考電壓由精密電壓基準環節提供。模擬電壓信號經運算放大器放大10倍后驅動壓電陶瓷負載。
2 ?系統選型及精度分析
壓電陶瓷驅動系統的誤差主要由三部分構成:運放引入誤差(OPA誤差)、數模轉換器引入誤差(DAC誤差)和精密電壓基準環節引入誤差(REF誤差),如圖2所示。
2.1 ?OPA引入誤差分析
2.1.1 ?失調誤差的影響
OPA的失調誤差主要由輸入偏置電流和輸入失調電壓引起,輸入偏置電流經反饋網絡以電壓的形式在輸出端引入誤差,輸入失調電壓經噪聲增益放大后在輸出端引入誤差。
本驅動系統中,OPA選擇APEX公司的PA85型高壓運算放大器。PA85作為MOSFET輸入,輸入偏置電流Ib=5 pA,其影響非常小,可以忽略。輸入失調電壓Vos=0.5 mV,噪聲增益Gn=10,因此失調誤差將導致OPA輸出端誤差[Eo1](單位:mV)為:
[Eo1≈Gn·Vos=5] ? ? ? ? ?(1)
2.1.2 ?增益誤差的影響
OPA的開環增益Ao1會隨著頻率的增高而逐漸減小,從而導致系統的環路增益T減小,增大系統的增益誤差。系統增益Ac1與OPA開環增益Ao1有如下關系:
[Ac1=A*c1·11+1T=A*c1·11+1Ao1?β] ? ?(2)
式中:[A*c1]=10為理想系統增益;β=0.1為反饋增益;[Ao1]為開環增益。
[Ao1]可表示為:
[Ao1=A0o1(1+jfP1)(1+jfP2)] ? ? ? ?(3)
式中:[A0o1]為開環直流增益;P1和P2為開環增益極點。
為了進一步確定增益誤差,對PA85進行PSpice仿真,得到[A0o1]=103 dB,P1=224 Hz,P2=3.9 MHz。因此,當f在DC 100 Hz帶寬范圍內變化時,[Ao1]的可變范圍為102~103 dB,T的范圍為82~83 dB,從而可得[Ac1]的范圍為9.999 2~9.999 3。
按最壞的情況進行計算,當輸入電壓Vin=10 V時,頻率特性將導致OPA輸出誤差[Eo2](單位:mV)為:
[Eo2=(A*c1-Ac1)·Vin=8] ? ? ?(4)
2.1.3 ?噪聲的影響
OPA的輸出噪聲主要由低頻段的閃爍噪聲和中高頻段的白噪聲組成,對其輸入端噪聲譜密度建模可得:
[en=100f, ?1 Hz≤f<1 kHz4, ? ? ? ? ?1 kHz≤f≤∞] ? ?(5)
式中,[en]為噪聲譜密度,單位為[nVHz]。因此,在1 Hz~1 MHz頻段內噪聲將導致OPA輸出端誤差為:
[Eo3=10100ln 1 0002+41×106-1×1032 ? ? ?=40 μVrms=132 μVpp] (6)
2.1.4 ?OPA誤差
OPA作為系統的最后一級,其誤差將直接體現在系統輸出端。最壞情況為上述所有影響同時發生,則OPA向系統輸出引入誤差[Eo](單位:mV)為:
[Eo=Eo1+Eo2+Eo3≈13] ? ? ?(7)
2.2 ?DAC引入誤差分析
DAC的輸出電壓與輸入數碼之間存在誤差,其中,主要由積分非線性誤差、失調誤差和增益誤差構成,如圖3所示。失調誤差是指模擬輸出的實際起始值與理想起始值的偏差,增益誤差是指DAC特性曲線的實際斜率與理想斜率的偏差,積分非線性誤差是指實際轉換特性曲線與最佳擬合直線的最大偏差。
在本驅動系統中,DAC選擇Analog Devices公司的AD5570型數模轉換器。AD5570的三項誤差分別為0.4 LSB,3 LSB和3 LSB,當使用5 V的電壓基準時1 LSB=0.3 V。最壞情況下,三項誤差疊加在DAC輸出端,再經OPA放大后向系統引入誤差[Ed](單位:mV):
[Ed=0.4+3+3×0.3×10≈19] ? ? (8)
2.3 ?REF引入誤差分析
2.3.1 ?初始精度的影響
REF初始精度是指器件在不受外界條件影響的條件下其自身性能導致的輸出偏差。本驅動系統中,REF選擇Linear Technology公司的LTC6655型電壓基準。LTC6655的初始精度為0.025%,其額定輸出為5 V,這將導致REF輸出端誤差[Er1](單位:mV)為:
[Er1=0.025%×5=1.25] ? ? ? (9)
2.3.2 ?溫度漂移的影響
在實際工作條件下,環境溫度很難保持恒定,這將導致REF的輸出電壓出現漂移,進而向驅動系統引入誤差。LTC6655的溫漂系數為2 ppm/℃,并假設工作環境存在50 ℃的溫度變化,這將導致REF輸出端誤差[Er2](單位:mV)為:
[Er2=2×10-6×5×50=0.5] ? ? (10)
2.3.3 ?時間漂移的影響
隨著系統工作時間的增加,REF器件的性能逐漸發生變化,這也將導致REF的輸出電壓出現漂移,進而向驅動系統引入誤差。LTC6655的時漂系數為60 [ppmkHr],因為半導體時漂系數會以指數規律減小,故取前2 000 h內時漂導致REF輸出端誤差的總和[Er3](單位:mV)作為時漂的最終影響:
[Er3=60×10-6×5×1+13=0.4] ?(11)
2.3.4 ?REF誤差
REF作為系統的第一級,其誤差將經過DAC的前端網絡和OPA的電壓放大,在最壞情況下,上述所有影響發生疊加,REF向系統輸出引入誤差[Er](單位:mV)為:
[Er=Er1+Er2+Er3×40=86] ? (12)
2.4 ?系統誤差
綜合以上的分析可以看到,本文設計的壓電陶瓷驅動系統輸出精度[E](單位:mV)約為:
[E=Eo+Ed+Er=118] ? ? ? (13)
滿足系統設計指標。同時可以看到,電壓基準經過DAC前端網絡和OPA的兩次電壓放大,對于驅動系統的精度影響最大,可以使用不帶有前端增壓網絡的DAC以進一步減小系統誤差。
3 ?系統驗證
根據上述的設計與研究,制作壓電陶瓷驅動系統的樣機,如圖4所示。
對該樣機進行性能實驗,輸出端的直流電壓使用Agilent公司3458A型8位半數字萬用表來測量。實驗過程中,使用示波器監測系統的輸出電壓,待其穩定后方可讀取萬用表的測量值。
上位機控制驅動系統以10 V為增量逐步改變系統輸出量,觀測并記錄驅動系統輸出的實測值,與預期值進行比較,結果如表1所示。
從實驗結果可以看出,在0~100 V的電壓輸出范圍內,系統實際測得的直流電壓與預期值之間的偏差均小于80 mV,該結果與理論分析及系統設計指標相符,基本滿足光刻機投影物鏡中使用壓電陶瓷進行精密定位的要求。
4 ?結 ?語
本文設計了針對光刻機投影物鏡中使用壓電陶瓷對象質補償鏡組進行精密定位控制的驅動系統。對所設計樣機進行了性能實驗,通過觀測得到驅動系統的實際輸出值滿足理論分析的設計指標,表明壓電陶瓷驅動系統符合設計要求。目前該項技術已應用到光刻機投影物鏡的研發之中,其對定位控制精度有較好的改進效果,對后續精密定位控制的研究具有指導借鑒意義。
參考文獻
[1] 張巍,于新峰,周連生,等.精密光學系統的熱像差[J].光學精密工程,2015,23(11):3033?3040.
[2] 諸波爾,李思坤,王向朝,等.基于多偏振照明的浸沒式光刻機投影物鏡高階波像差快速檢測技術[J].光學學報,2018,38(7):1?9.
[3] 范占斌,戴一帆,關朝亮,等.集成應變反饋層的橫向壓電驅動變形鏡面形預測及閉環控制[J].儀器儀表學報,2018,39(6):34?40.
[4] 劉志祥,邢廷文,蔣亞東,等.大數值孔徑物鏡的波像差測量及其特殊問題[J].光學精密工程,2016,24(3):482?490.
[5] 侯靜,吳成東,董再勵,等.基于AFM的虛擬納米手操作策略研究[J].儀器儀表學報,2013,34(5):1167?1172.
[6] 王學亮,李佩玥,鄭楠,等.運放對壓電陶瓷驅動電路系統精度影響的研究[J].電子測量技術,2014,37(10):33?36.
[7] 曹小濤,李德全,李洪文,等.非共振式壓電直線電機精密驅動及定位控制[J].光學精密工程,2017,25(8):2139?2148.
[8] 王學亮,鞏巖.光刻物鏡中壓電陶瓷驅動器的動態性能研究[J].光子學報,2012,41(9):1071?1075.
[9] 安凱.壓電驅動器電壓及其頻率對驅動速度的影響[J].現代電子技術,2014,37(13):113?115.
[10] 葛川,李朋志,章明朝,等.基于ARM的高分辨率壓電陶瓷驅動電源[J].現代電子技術,2013,36(14):166?170.
[11] 郭嘉亮,李朋志,李佩玥.壓電陶瓷定位系統電容傳感器容錯控制[J].現代電子技術,2014,37(21):152?155.
[12] 趙碧杉,尹達一,曾攀,等.高精度大功率壓電陶瓷驅動關鍵技術[J].壓電與聲光,2013,35(6):853?857.
[13] 陳俊,徐志偉,陳杰.壓電驅動器驅動電源設計[J].國外電子測量技術,2014,33(4):48?53.
[14] 李海寧,王海峰,崔宜梁,等.不同脈沖電壓對壓電噴墨液滴演化的影響分析[J].青島大學學報(工程技術版),2019(4):6?10.
[15] 張耀文.基于壓電陶瓷的橋梁伸縮縫疲勞損傷監測及波紋管密實性檢測研究 [D].長沙:長沙理工大學,2019.
作者簡介:陳姝雨(1984—),女,遼寧沈陽人,碩士研究生,主要從事電子電路方面的實驗教學與實驗室建設的研究工作。
