電子羅盤動態航向誤差校正研究
2020-12-28 11:49:40李翔劉曉琴
現代電子技術 2020年24期
李翔 劉曉琴

摘 ?要: 電子羅盤通過三軸磁強計測量地磁場矢量獲取航向信息,其精度易受傳感器自身非理想特性及外界干擾磁場影響。傳統校正方法未考慮傳感器的動態特性,僅能保證羅盤在靜態下的航向精度。為改善電子羅盤的動態精度,對三軸磁強計的動態響應進行建模,采用動靜結合的數據采集方式完成校正,并分別對羅盤的靜態和動態航向精度進行檢驗。實驗結果表明,采用動態響應模型校正后,可使航向角動態誤差減小50%以上,且靜態誤差均方根小于0.5°,提升了電子羅盤的動態精度。
關鍵詞: 電子羅盤; 航向角; 誤差校正; 動態響應; 航向精度檢驗; 實驗驗證
中圖分類號: TN304.7?34; TP212 ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)24?0052?03
Research on dynamic heading error calibration of electronic compass
LI Xiang, LIU Xiaoqin
(School of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin 541004, China)
Abstract: The electronic compass can obtain the heading information by measuring geomagnetic field vector by the three?axis magnetometer, and its accuracy is easy to be affected by the non?ideal characteristics of the sensor and the external disturbing magnetic field. The traditional calibration method does not consider the dynamic characteristics of sensor and can only ensure the heading accuracy of the compass in static state. In order to enhance the dynamic accuracy of electronic compass, the dynamic response of three?axis magnetometer is modeled, the data acquisition method of dynamic and static combination is adopted to implement the calibration, and the static and dynamic heading accuracy of the compass is tested, respectively. The experimental results show that the calibration using dynamic response model can decrease the dynamic error of heading angle by more than 50%, while static root?mean?square error is less than 0.5°, which improves the dynamic accuracy of electronic compass.
Keywords: electronic compass; heading angle; error calibration; dynamic response; heading accuracy check; experimental verification
0 ?引 ?言
電子羅盤是一種利用地磁場獲取航向(方位)角信息的導航定位裝置。得益于傳感器和半導體技術的發展,電子羅盤已實現微型化、微功耗,并可通過采用適當的信號調理電路和數據處理算法實現對傳感器誤差和外界磁干擾的補償[1]。
為改善電子羅盤的航向精度,其誤差校正和補償方法近年來得到了充分研究。但常用的多位置法和橢球擬合法等校正方法均沒有考慮傳感器的動態響應特性。針對這一不足,本文對電子羅盤中的三軸磁強計進行了動態特性建模,以實現對其動態誤差的補償。通過實驗將所提出的模型和校正算法與常用校正方法進行了對比,結果表明本文方法在靜態和動態精度上均具有優勢。
1 ?電子羅盤原理概述
1.1 ?航姿測量
電子羅盤通常采用加速度計和磁強計分別測量重力加速度和地磁場矢量,進而根據重力和地磁場矢量計算航向角ψ、俯仰角θ和橫滾角φ等三個歐拉角,用于描述其載體的姿態。
設載體坐標系的x軸、y軸和z軸依次指向載體的前、右、下,而參考坐標系的三軸依次指向北、東、地。將參考系依次繞其x軸旋轉φ、繞y軸旋轉θ、繞z軸旋轉ψ,則與載體系相重合。另一方面,由于重力矢量[g]豎直向下,地磁場矢量[h]的水平分量指向磁北,故可由這兩矢量在載體系中的測量值依次計算出橫滾角φ、俯仰角θ和磁航向角[2?4]ψ。
1.2 ?誤差校正
電子羅盤中的三軸磁強計通常采用線性誤差模型[v=Kh+b+ε]。其中:[h]為地磁矢量,[v]為傳感器輸出,二者均為三維矢量;[K]為3×3矩陣,[b]為三維常矢量,二者共有12個誤差系數;[ε]為高階誤差項和噪聲項,通常略去不計[5?7]。
常用校正方法中,多位置法是將羅盤分別置于若干個精確已知的方向和姿態,根據本地磁傾角和磁偏角等信息計算出磁強計感受到的地磁矢量[h],并結合磁強計輸出數據確定誤差模型[8]中的[K]與[b]。
另一種常用校正方法為橢球擬合法。由于同一地點的地磁場強度短期內可認為是常數,因而磁強計處于任意姿態時,[h]的軌跡是以坐標原點為球心的球面。而在[K]與[b]的作用下,磁強計輸出矢量[v]的軌跡為橢球面,因而校正問題轉化為擬合橢球面并將其還原為球面[9?11]。
上述兩種方法均是以磁強計的線性靜態誤差模型為基礎,并未考慮磁強計的動態特性,因而無法對電子羅盤的動態誤差進行補償。
2 ?動態特性建模與校正
2.1 ?動態響應模型
傳感器的動態特性多采用傳遞函數來描述。傳遞函數通常在復頻域即s域中定義,且與時間常數、固有頻率、阻尼比等指標密切相關[12]。然而在電子羅盤中,磁強計的輸出信號是先經過模數轉換后再進行處理,因而在離散域即z域進行動態建模更為方便。此外,傳統的系統辨識方法是先擬合傳感器的傳遞函數[Hs=YsXs],其中,[Xs]和[Ys]分別為輸入、輸出信號的拉氏變換,再根據[Hs]采取相應的補償措施。為簡化校正和補償過程,本文直接對傳遞函數的逆函數進行擬合,即擬合式(1)中的[Dz=hzvz],其中,[hz]和[vz]分別為磁場真值和磁強計輸出序列的z變換。
[hz=m=0pamz-m1-n=1qbnz-nvz=Dzvz] ?(1)
記采樣時刻k對應的磁場真值與磁強計輸出分別為[hk]與[vk],則式(1)可改寫為:
[hk=m=0pamvk-m+n=1qbnhk-n] (2)
利用式(2)進行磁強計動態建模和誤差補償,需注意以下幾點:
1) 由于[hk]與[vk]均為三維矢量,故系數[am]與[bn]均應為3×3矩陣形式;
2) 為保證數值穩定性并降低計算復雜度,階次p,q不宜過高,此處取p=2,q=1;
3) 為補償磁強計常值誤差(包括零位誤差及硬磁干擾),應在式(2)中增加常數項[c]。
考慮以上因素,式(2)可進一步改寫為:
[hk=a0vk+a1vk-1+a2vk-2+b1hk-1+c] ?(3)
式(3)即為磁強計動態誤差補償模型,其中,[a0]~[a2]和[b1]均為3×3矩陣,[c]為三維常矢量,共計39個參數。
2.2 ?數據采集與校正
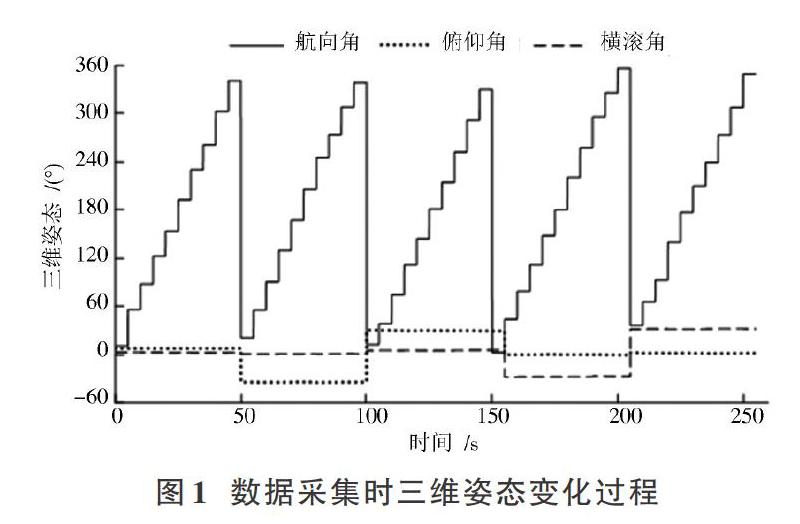
為準確擬合式(3)中的各參數,保證電子羅盤校正后的靜態和動態精度,數據采集過程應采用動靜結合的方式,即在靜態和動態下均應分別采集足夠充分的數據。考慮橢球擬合法中一種簡單常用的數據采集方式:將羅盤分別置于水平和向前、后、左、右傾斜等五種狀態,并在這五種狀態下分別繞豎直軸旋轉1周。在此基礎上,在旋轉過程中選取若干個方位作為靜止點,即可構成動靜結合的數據采集流程。圖1所示曲線即為按上述流程采集數據時航向角ψ、俯仰角θ和橫滾角φ的變化過程。
假設已得到磁場真值數據序列[h1 ?h2 ?… ?hr]以及相應的磁強計輸出序列[v1 ?v2 ?… ?vr],為求解式(3)中各個參數,先將式(3)改寫為線性方程組[AX=B]的形式,其中待求參數矩陣:
[X=a0 ?a1 ?b0 ?cT] (4)
按式(4)中寫法,[X]為13行×3列,與之對應的矩陣[A]和[B]分別為:
[A=v3v2v1h211×3v4v3v2h311×3?????vrvr-1vr-2hr-111×3] ?(5)
[B=h2h3…hrT] ?(6)
式中,[11×3=1 ?1 ?1]。至此,即可采用最小二乘法求解[AX=B]得到式(3)中的各個參數。
在對磁強計進行校正后,仍根據圖1所示姿態變化流程,對電子羅盤的靜態和動態航向精度進行檢驗。
3 ?實驗驗證
3.1 ?實驗方法
本文采用基于Honeywell? HMC1021和HMC1022磁強計的三軸電子羅盤進行校正實驗,并采用Xsens? MTi?300航姿模塊提供準確的航向角、俯仰角和橫滾角數據作為參考。
實驗步驟如下:
1) 原始數據采集,具體過程已在第2.2節說明;
2) 分別采用多位置法、橢球擬合法和本文提出的基于動態模型的補償方法,對電子羅盤進行誤差校正和補償;
3) 分別采用上述三種方法進行補償后,檢驗電子羅盤的航向角靜態精度和動態精度。
3.2 ?實驗結果
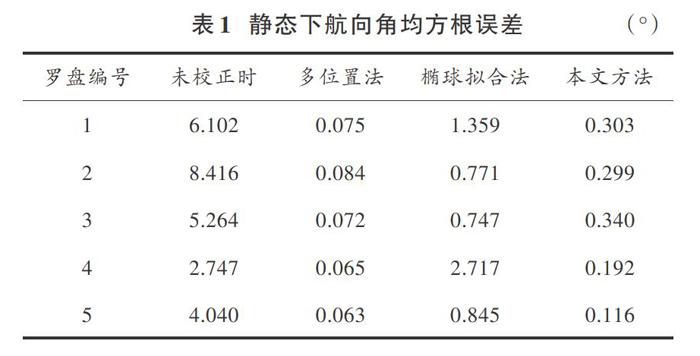
實驗中,共對5個電子羅盤分別按上述步驟進行誤差補償和精度檢驗。靜態和動態下航向角的均方根誤差(Root Mean Square Error,RMSE)分別列于表1和表2。
3.3 ? 討 ?論
由表1和表2可見,實驗所用三種校正方法的結果均具有較好的可重復性。此外,對比未校正時及各方法校正后的測量結果,可得如下結論。
首先,不論采用何種方法校正(包括未校正時),實驗所用各電子羅盤的動態誤差都要大于靜態誤差,說明磁強計動態響應特性對航向角精度有不可忽視的影響。
其次,采用多位置法或橢球擬合法校正后,靜態下航向精度較好(且多位置法效果好于橢球擬合法),但動態下航向角誤差仍很大。換言之,這兩種方法僅能保證羅盤的靜態精度。
相比之下,本文所述方法對于羅盤的靜態精度和動態精度均有明顯提升,靜態航向誤差(RMSE)可減小至0.5°以內,動態航向誤差則減至2.5°以內。相對于多位置法和橢球擬合法而言,本文方法使動態精度改善了50%以上。圖2所示為實驗中1#電子羅盤航向角動態響應曲線,可見本文方法確實使羅盤的動態響應得到了明顯改善。
4 ?結 ?論
針對傳統校正方法不能補償電子羅盤動態誤差的缺陷,本文對三軸磁強計的動態特性進行建模,并利用該模型對電子羅盤進行了誤差校正和補償實驗,證明了本文方法的可行性。經本文方法校正后,動態下航向角誤差可減小至2.5°(RMS)以內,并可保證靜態誤差小于0.5°(RMS),顯著提升了電子羅盤的動態精度。
參考文獻
[1] 曹平軍,呂冰.基于誤差補償的電子羅盤抗干擾設計[J].儀表技術與傳感器,2013(3):22?24.
[2] 徐德昌,蔡成林,李思民,等.一種手持式電子磁羅盤航向誤差校正方法[J].電子器件,2018,41(5):1275?1279.
[3] 程瑋瑋,宋延華,王偉.多旋翼無人機磁羅盤校準方法[J].計算機測量與控制,2019,27(5):236?239.
[4] 樊依林.LSM303DLH在鉆孔軌跡測量中的應用[J].電子測量技術,2019,42(12):129?132.
[5] 石崗,李希勝,李雪峰,等.航向測量系統中三軸磁傳感器標定的等效兩步法[J].儀器儀表學報,2017,38(2):402?407.
[6] 龍禮,黃家才.基于遞推最小二乘法的地磁測量誤差校正方法[J].儀器儀表學報,2017,38(6):1440?1446.
[7] 劉建敬,陳麗,汪冬瑾,等.三軸磁傳感器的校正方法[J].現代電子技術,2018,41(9):179?181.
[8] S?RKK? O, NIEMINEN T, SUURINIEMI S, et al. A multi?position calibration method for consumer?grade accelerometers, gyroscopes, and magnetometers to field conditions [J]. IEEE sensors journal, 2017, 17(11): 3470?3481.
[9] OUSALOO H S, SHARIFI G, MAHDIAN J, et al. Complete calibration of three?axis strapdown magnetometer in mounting frame [J]. IEEE sensors journal, 2017, 17(23): 7886?7893.
[10] 夏琳琳,耿靖童,肖建磊,等.一種正交三軸磁羅盤的橢球擬合分步優化補償方法[J].中國慣性技術學報,2018,26(4):478?483.
[11] 秦賡,管雪元,李文勝.基于橢球補償的三維載體磁場誤差補償方法[J].電子測量技術,2018,41(2):37?40.
[12] 賴正喜,張曉明,楊國歡,等.基于帶電直導線周圍磁場的磁傳感器動靜態特性標定方法[J].傳感技術學報,2014,27(10):1343?1348.
作者簡介:李 ?翔(1984—),博士,講師,主要研究方向為智能傳感器與智能儀器系統。
劉曉琴(1993—),女,甘肅白銀人,碩士研究生,主要研究方向為傳感器誤差補償與數據融合。
