PLC模糊控制在帶式輸送機控制系統中的應用
2020-12-28 11:20:39聶勇
中國化工貿易·中旬刊 2020年7期
聶勇

摘 要:帶式輸送機作為煤礦井下的主要生產運輸工具,由于其運輸距離長、運量大,長期高負荷運轉下易發生機械故障。特別是采用傳統的控制方式會造成帶速頻繁改變,導致輸送機電機頻繁啟停,損害電機縮減使用壽命。本文結合帶式輸送機的運行特點與工作原理,基于PLC和模糊控制的基本原理設計了帶式輸送機智能調速控制系統,試驗取得良好效果,提高了帶式輸送機運行的可靠性。
關鍵詞:帶式輸送機;智能控制系統;PLC模糊控制;非線性控制
帶式輸送機具有運輸距離長、運量大和運行效率高等特點得到廣泛應用,是煤礦井下的主要生產運輸工具。在實際生產運輸過程中由于運輸量不穩定,運行速度固定不變,在運輸量小時易導致帶式輸送機空載,電機的頻繁啟停還會損害電機[1]。為提高帶式輸送機的運行穩定性,采用PLC和模糊控制算法來提升對電動機的精確控制,系統節能顯著,運行安全穩定性高,達到節能減排目標。
1 智能控制系統的組成
帶式輸送機因其運輸距離長、負載大在煤礦井下得到廣泛應用。煤礦井下的帶式輸送機是由雙滾筒多電機進行驅動,進而滿足長距離、高負載的要求。但煤礦井下復雜環境導致電動機控制方案老舊,對控制設備要求高,常采用傳統防爆設備進行簡單控制,從控制效率上并不能配合電動機進行高效工作。以帶式輸送機為研究對象,重點研究其在該領域的應用,為帶式輸送機的研究與發展提供一些參考與借鑒[2]。
智能控制系統的設計。帶式輸送機的控制核心在于PLC可編程邏輯控制器。由主站上位機通過Profibus-DP總線進行與從站通信,通過RS485與變頻器進行通信,由變頻器控制帶式輸送機的電動機運行。
2 模糊控制理論
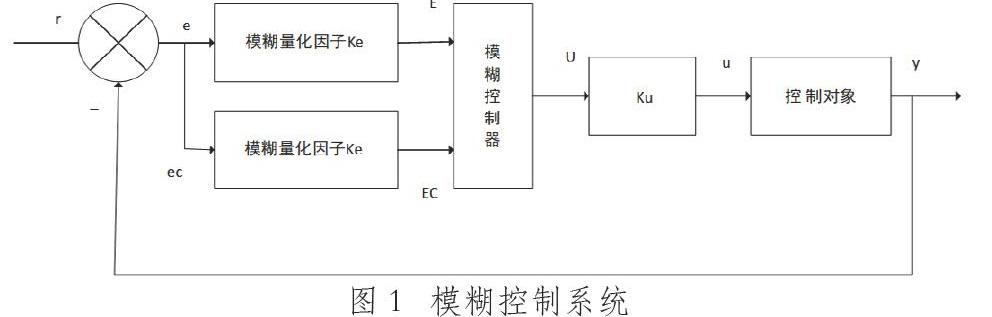
模糊控制器基本結構如圖1所示。模糊控制器包括輸入量模糊化、模糊推理和解模糊的3個部分。E和EC分別為e和ec模糊后的模糊量;U為模糊控制量;u為U解模糊化后的精確量。Ke、Kec、Ku分別為e、ec和u的模糊化因子。模糊控制系統設計主要有下面幾步完成。
2.1 建立模糊控制規則庫
模糊控制系統包括硬件和軟件兩部分組成。模糊控制算法在實際工程中硬件主要包括處理器的參數、系統通訊等;軟件則主要包括算法的邏輯及實際編程語言的實現。模糊控制規則:If E is A and E is B,Then U is C.其中,A、B、C均為模糊集中的元素。
2.2 輸入模糊化
本設計將帶速偏差e與帶速偏差變化率ec作為模糊控制算法的輸入量,由以下公式計算:
通過對模糊子集的匹配,本文假設把模糊變量E,Ec以及U分為5擋,即正大(PB)、正小(PS)、零(ZO)、負小(NS)、負大(NB)。基于對模糊算法的調試經驗,選取三角形隸屬函數,本文將U、E、Eec分為{-3,-2,-1,0,+1,+2,+3}7檔,則共有49條模糊控制規則。
2.3 輸出反模糊化
根據模糊規則表,由模糊推理合成規則,可得到如下關系:U=(E×Ec)×R,以此得到模糊控制量如表所示。得到模糊控制量U以后,再將U乘以Ke于是得到精確控控制量,u再經過D/A(數字量/模擬量)轉換模塊輸出對執行機構精確控制。
3 模糊算法的實現
3.1 西門子S7-300可編程邏輯控制器
帶式輸送機的電動機控制多采用西門子PLC S7-300型號,以下討論模糊控制算法在PLC中的應用。可編程邏輯控制器PLC是應用于工業現場的專用型微型計算機,其硬件結構與邏輯跟計算機基本相同。通過其官方的博途V3進行程序的編寫和上傳,通過結構化程序編寫進行實現設計的功能。PLC的編程語言有梯形圖(LD)、指令表(IL)、功能模塊圖(FBD)、順序功能流程圖(SFC)等。PLC也可以通過通信電纜進行和上位機或者下位機進行通訊,從而實現遠程可視化控制。
3.2 程序設計流程圖
模糊控制算法可以通過梯形圖程序實現。在模糊控制系統中,采用西門子公司的S7-300型PLC,PLC通過輸入端子采集信號經過A/D轉換,由中央處理器進行處理,再經過D/A轉換將信號送至輸出端子控制執行機構。模糊控制設計流程圖如圖2所示。
3.3 PLC程序實現
首先,將量化因子寫入PLC的數據寄存器中,然后利用A/D模塊將輸入量采集到PLC的DM區,經過限幅量化處理后,根據它們所對應的輸入模糊論域中的相應元素,查模糊控制查詢表,在乘以輸出量化因子即可得到實際值,由D/A模塊輸出。
在模糊控制算法中,模糊控制量表的查詢是程序設計的關鍵。本文將模糊論域的元素{-3,-2,-1,0,+1,+2,+3}轉換為{0,1,2,3,4,5,6},采用基址+變址的尋址方式將模糊控制量表中的U的控制結果按由上到下、由左到右的順序依次填入PLC的數據寄存DB區中。控制量的基址為100,其偏移地址為ec5+e,所以根據ec和e最終得到的控制量地址為100+ec5+e。
4 防真效果分析
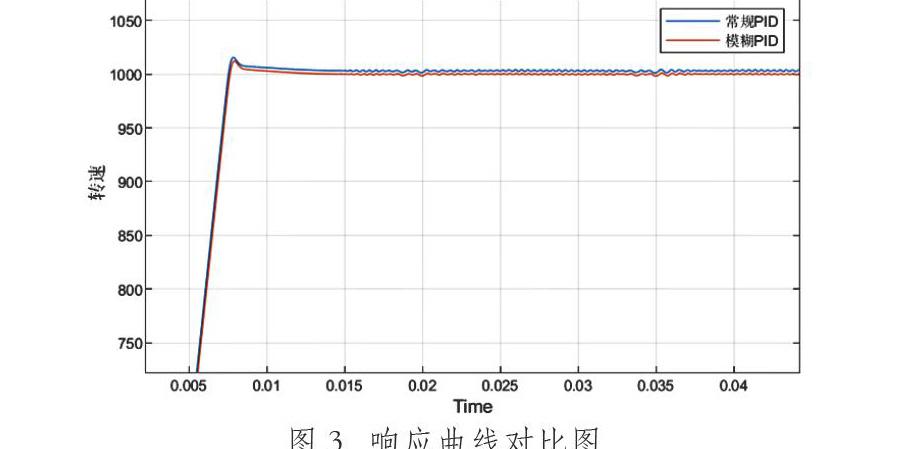
使用MATLAB集成的模糊邏輯工具箱針對井下輸送機的不同負載情況應用本設計的模糊PID算法和傳統經驗PID算法進行系統仿真比較,得到相應曲線如圖3所示。通過仿真結果可以看出,本文設計的模糊PID控制算法系統超調小,響應迅速、穩定性高,各方面均優于常規PID控制,達到了針對井下輸送機負載條件的控制要求,能夠更加智能地控制輸送機電動機的運轉,進而也達到了節能減排的目標。
5 結論
針對井下帶式輸送機智能控制的運行工作特點,運行控制采用恒速運行,效率低下問題。PLC和模糊控制的基本原理,設計了由可編程邏輯控制器(PLC)為主要核心控制中心的模糊PID智能控制系統。對PLC系統的硬件組成、模糊算法的基本原理、以及針對常規PID規則優化的模糊算法規則、系統的實現進行了詳細的闡述。通過MATLAB工具進行了本設計的模糊PID算法和常規PID算法應用在輸送機調速上的對比,驗證了本設計系統效能良好,能夠實現井下多級帶式輸送機根據不同負載智能調節帶速,提高帶式輸送機的運輸效率,傳輸效率的提高,響應節能減排的目標。
參考文獻:
[1]陳慧,陸榮.基于PLC和模糊控制的帶式輸送機聯動控制研究[J].煤礦機械,2013(02):207-209.
[2]楊光輝,安琪.多機驅動帶式輸送機功率平衡模糊控制方法[J].工礦自動化,2014(03):69-73.