小輪椅 大未來
2021-01-03 11:49:39樂羊羊
學苑創造·B版 2021年12期
樂羊羊




一、設計靈感
廖雋晞、黎俊良、賀惠荃三位同學相識于學校的科技社團,他們是志同道合的科創“戰友”,常常聚在一起討論和研究科創作品。一次,他們了解到中國有近一億的殘疾人,能否為他們做點什么,讓他們的生活變得更加便利呢?廖雋晞、黎俊良、賀惠荃三位同學萌生出設計一款“智能輪椅”的想法,幫助殘疾人解決行動不便的問題。
二、指導老師與設計者
姓名:孫自超,一級教師。梧州市中山小學信息技術教師兼學校科技輔導員。
姓名:廖雋晞
座右銘:為什么夢想沒有實現?因為沒有堅持,沒有努力,沒有奮斗。
姓名:黎俊良
座右銘:學而不思則罔,思而不學則殆。
姓名:賀惠荃
座右銘:超越夢想,超越自我!
三、星成就
合作作品《多吉3號:聰明的輪椅》榮獲第19屆廣西青少年機器人競賽暨東盟國家及粵港澳青少年機器人邀請賽創意比賽小學組一等獎。
四、科創過程
第1步:確定制作思路。
廖雋晞、黎俊良、賀惠荃三位同學經過多次研究,確定了作品的設計方案。該智能輪椅先用攝像頭拍攝使用者的眼球轉動方向和臉部動作,然后將圖像傳輸到自身搭載的電腦上,再通過電腦發出對應的動作指令,如原地轉動或直行等。
第2步:硬件制作。
前期硬件制作的工作包括拼接輪椅、安裝舵機和安裝電腦處理器等。為了高效完成各項任務,賀惠荃、廖雋晞、黎俊良三人進行了分工,手巧心細的賀惠荃負責裁切水管和拼裝輪椅;廖雋晞、黎俊良負責把舵機、樹莓派電腦等硬件安裝到輪椅上。
孫自超老師:他們最初選擇采用傳統雙電機驅動的方法驅動智能輪椅,因為安裝雙電機的方法較為簡單,但在測試性能時,他們發現雙電機無法為智能輪椅提供足夠的動力,于是改為使用四電機的方案。與傳統雙電機驅動相比,四電機的安裝過程較為復雜,編寫程序的難度也較大,但可以提供充足的動力。
第3步:編程環節。
擅長編程的廖雋晞和黎俊良共同負責編寫程序,他們使用神經網絡VGG16和OpenCV庫編寫程序。在編程過程中,他們遇到了程序無法運行的問題;也遇到程序運行不成功,智能輪椅不啟動或不按指令啟動的情況……遇到新問題的他們,沒有退縮,而是迎難而上,通過檢查電機是否正常運轉、運行程序代碼是否正確等手段,找到解決辦法。
孫自超老師:VGG16是一種圖像分類的VGG卷積神經網絡,由13層卷積層和3層全連接層組成,主要用來對圖像進行分類,其程序運行的速度和準確率都很高。OpenCV是一個開源的計算機視覺軟件庫,可以控制攝像頭等設備。廖雋晞和黎俊良在這次編程中使用OpenCV和VGG16這兩個程序,自己動手制作了一個臉部動作分類庫。
第4步:采集面部圖片。
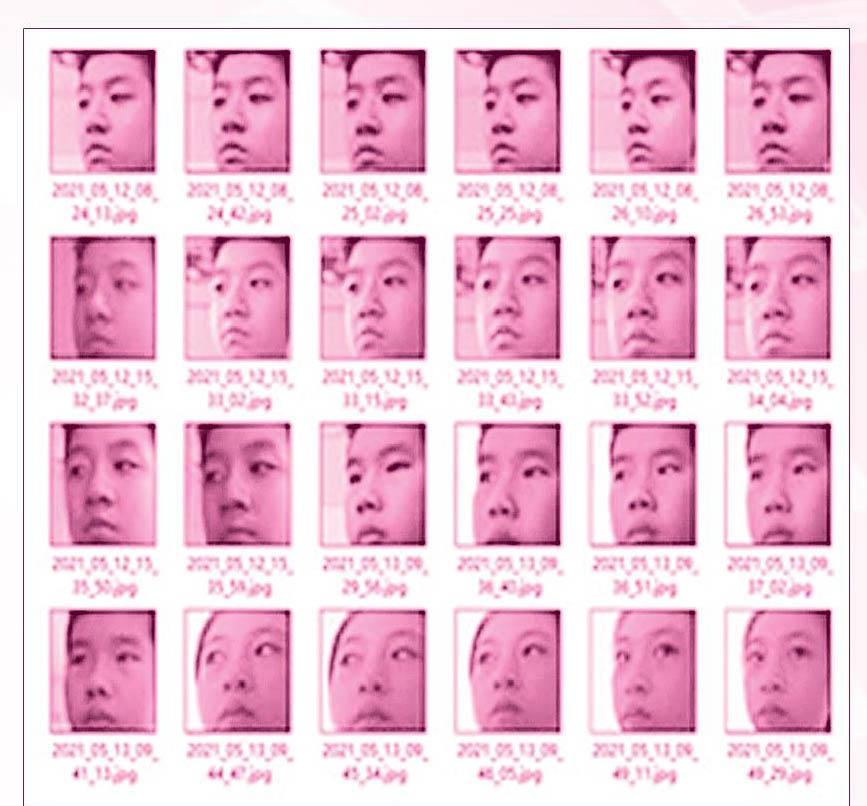
三人在調查中發現,有些殘疾人頭部以下的肢體都不能動,且只能稍微移動頭部,有些甚至只能轉動眼球。因此,他們先嘗試設計能識別眼球轉動方向的程序。當使用者持續向前看時,智能輪椅開始啟動或前行;當使用者持續向左或向右看時,智能輪椅根據所看的方向轉彎;當使用者閉上眼睛時,智能輪椅停止行動,但若使用者閉眼的時間超過3秒,就會觸發智能輪椅的報警裝置。為了完成這個設計方案,他們三人互相拍攝了1000多張臉部的照片,主要拍攝睜眼、閉眼、眼睛向左看、眼睛向右看的照片,并以此作為智能輪椅的圖像素材。
孫自超老師:智能輪椅電腦識別表情的步驟分為三步,第一步是要從圖像中框選出人臉的矩形范圍;第二步是利用識別到的人臉圖像進行訓練;第三步是生成識別模型,準確識別出圖片中的眼部動作。
第5步:測試智能輪椅的動作識別能力。
在完成智能輪椅的初步設計后,三人馬上就開始測試智能輪椅的操控性能。黎俊良擔任測試“模特”,他先睜開眼睛直視前方兩秒鐘,這時,智能輪椅開始前進;然后他眼球往左轉,并保持動作兩秒鐘,智能輪椅開始向左轉動;接著他眼球又往右轉動,并保持動作兩秒鐘,智能輪椅自動向右轉動;最后,黎俊良閉上眼睛,兩秒鐘后智能輪椅停止運動,閉眼時長超過三秒鐘時,智能輪椅啟動報警裝置,并自動撥打“120”電話。智能輪椅的性能達到了他們的預期目標,測試成功了!三人高興地將智能輪椅命名為“多吉3號”。
第6步:未來優化。
未來,三位同學希望“多吉3號”智能輪椅可連接無線網絡,擁有獨立的電池。另外,他們目前擁有的圖像素材不夠豐富,雖然現在智能輪椅捕捉眼部動作的正確率達到86%,但僅局限于三位設計者的眼部動作,所以他們要采集更多的素材,以提高智能輪椅的普適性。他們希望有一天,這款智能輪椅能真正投入使用,幫助到更多有需要的人。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49