亞軌道飛行器返場技術(shù)研究
2021-01-04 14:08:36汪保旭孫歌蘋
機械制造與自動化 2020年6期
關(guān)鍵詞:指令
汪保旭,孫歌蘋
(南京航空航天大學 飛行控制研究所,江蘇 南京 210016)
0 引言
亞軌道飛行器(SRLV)是一種在亞軌道空間飛行、可重復使用的多用途飛行器。相比于軌道飛行器,亞軌道飛行器具有系統(tǒng)結(jié)構(gòu)、發(fā)射條件簡單、飛行成本低等特點,因而在軍事和民營領(lǐng)域,亞軌道飛行器已經(jīng)成為研究的熱點。
根據(jù)不同的飛行任務(wù),亞軌道飛行器在上升段與結(jié)束時狀態(tài)差異巨大,高度的變化范圍為30 km~70 km ,速度的變化范圍為0.76 m/s~1.27 m/s。不同的初始返回狀態(tài)對應(yīng)不同的航程,制導系統(tǒng)需根據(jù)初始返回點的狀態(tài)判斷飛行器能否返回著陸場。
亞軌道飛行器返回階段通常分為3個階段:初期返回段、能量管理段和著陸段。X-34應(yīng)急返場方案[1]可推算飛行器在能量管理段入口飛行狀態(tài),比較該狀態(tài)下可飛行的航程以及到各個著陸場的待飛距離,選擇合適的著陸場并返回。航天飛機的GRTLS(glide return to launch site)即滑翔返回發(fā)射場制導[2-3]是在上升飛行的前4 min內(nèi)因發(fā)動機故障無法正常入軌,實施應(yīng)急策略,使航天飛機進入能量管理段窗口,并最終返回預先設(shè)計的發(fā)射場。
由于亞軌道飛行器的初期返回段高度較高,空氣稀薄,氣壓低,雖然待飛距離可以由橫側(cè)向制導算法計算出,但縱向無法規(guī)劃高度和動壓剖面,因而無法根據(jù)初期返回點的能量狀態(tài)判斷飛行器的航程能力,進而判斷能否返場。
本文將初期返回段當作能量管理段的延伸,參考能量管理段的判斷方法[4],設(shè)計制導參數(shù)迭代算法,分別通過調(diào)整初期返回段的迎角指令、航向校準圓柱(heading align column, HAC)位置和切換進場方式來判斷飛行器能否從最高點返回著陸場,最后進行實例仿真驗證。
1 質(zhì)點動力學方程
亞軌道飛行器初期返回段主要考慮縱向運動,忽略橫側(cè)向的影響。由于地球自轉(zhuǎn)引起的哥氏力、重力加速度變化較小,假定重力加速度為常數(shù),忽略地球曲率,忽略自轉(zhuǎn)的影響,簡化后的質(zhì)點動力學方程為:
(1)

2 制導問題描述
根據(jù)不同的飛行任務(wù),亞軌道飛行器從最高點返回時的狀態(tài)不同。高度越高,速度越大,飛行器的能量越大,可飛行的航程越遠,反之航程越近。因此,當初始返回點的位置、速度和高度確定時,制導系統(tǒng)就能夠判斷當前狀態(tài)能否返回著陸場。
參考能量管理段的判斷方法,速度一定時,由初始返回點到著陸場的待飛距離計算出高度指令。若當前高度小于高度指令,則飛行器到不了著陸場;若當前高度大于高度指令,則飛過著陸場。由上文知,無法單獨根據(jù)初期返回點的能量狀態(tài)判斷飛行器的航程能力,進而判斷能否返場。
初期返回段縱向制導采用的是跟蹤開環(huán)迎角指令,調(diào)整迎角指令可以改變初期返回段結(jié)束時的高度。另一方面,由于初期返回段的航程受迎角指令變化影響較小,因而調(diào)整返回段的待飛距離主要影響能量管理段后面的飛行階段。制導系統(tǒng)通過調(diào)整初期返回段的迎角指令和返回段的待飛距離來驗證給定狀態(tài)的飛行器能否返回著陸場。
3 迎角指令對高度的影響
在初期返回段,亞軌道飛行器的軌跡角為負,升力和阻力在縱向的分力豎直向上,平衡重力,從而降低垂直加速度,抑制下沉率[5]。下沉率的公式為:
(2)
式中V為空速。
(3)
式中:L為升力;D為阻力。
由于CL、CD是迎角α、馬赫數(shù)Ma和氣動舵面的函數(shù),當馬赫數(shù)和氣動舵面一定時,迎角越大,CL、CD越大;升力越大,阻力越大,兩者豎直向上的合力越大。從而垂直加速度越小,下沉率變化越小,初期返回段結(jié)束時高度越高;反之,迎角越小,初期返回段結(jié)束時高度越低。
同一初始返回狀態(tài),不同初始迎角條件下,圖1是初期返回段的航程變化曲線,圖2是下沉率變化曲線,圖3是高度變化曲線。可知,初期返回段航程受迎角指令變化的影響較小,下沉率和高度影響較大。
圖1 初期返回段航程變化曲線
圖2 初期返回段下沉率變化曲線
圖3 初期返回段高度變化曲線
4 調(diào)整待飛距離的影響
當初期返回段的迎角指令調(diào)整到邊界值時,再通過調(diào)整HAC位置和切換進場方式來改變整個返回段的待飛距離。
由第3節(jié)可知,初期返回段不同的迎角指令對航程影響不大,因而調(diào)整HAC的位置主要影響能量管理段后面的待飛距離。當初期返回段結(jié)束時,實際高度低于高度指令,將HAC調(diào)整到最小位置,減少待飛距離;反之,實際高度大于高度指令時,將進場方式由直接進場改為間接進場,增大待飛距離。由表1可知,HAC距離跑道越近,返回段的待飛距離越小,剩余的待飛距離越短,計算出的高度指令越低。圖4是進場方式示意圖,由圖可知,間接進廠的待飛距離遠,剩余飛行的距離多,計算出的高度指令高。
表1 初始返回點狀態(tài) 單位:km
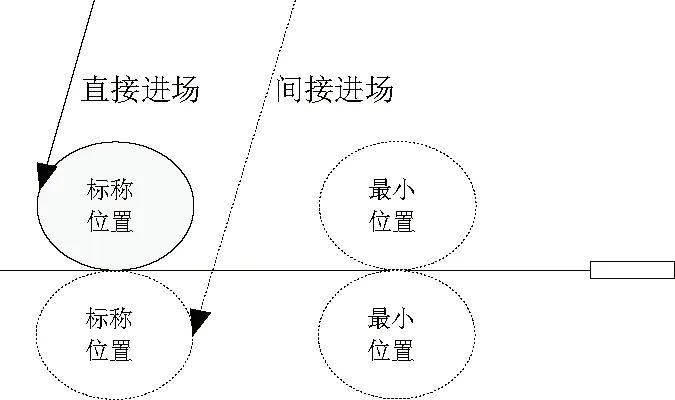
圖4 進場方式以及HAC位置示意圖
5 設(shè)計制導參數(shù)迭代算法
上文分別分析了RLV返回過程中,迎角指令對再入段結(jié)束時高度的影響以及調(diào)整HAC位置、切換進場方式對返回段待飛距離的影響。基于此,設(shè)計了制導參數(shù)迭代算法。
具體算法如下:任意給定一個初始返回狀態(tài),首先初始化HAC和著陸機場,制導系統(tǒng)計算出到著陸場的待飛距離,并根據(jù)初始速度計算出迎角指令,接著進行時間迭代。當初期返回段結(jié)束時,可以得到初期返回段的航程,用總的待飛距離減去初期返回段的航程得到剩余的待飛距離。再由剩余的待飛距離插值出標稱高度指令,比較實際的高度和標稱高度,判斷能否返回著陸場。
當實際高度高于標稱高度時,能量過大,飛過著陸場,將初始迎角指令減少1°,進行時間迭代。再次判斷兩者的關(guān)系,若實際高度已經(jīng)小于標稱高度,或者實際高度比標稱高度僅高不到500 m,則該迎角指令可以滿足返場條件,飛行器可以返回著陸場;若實際高度還遠大于標稱高度,重復上步驟進行迎角迭代,直到迎角指令<16°時跳出迎角迭代(迎角指令下邊界取16°,上邊界取29°)。同樣,當實際高度小于標稱高度時,迎角反向迭代。
當迎角迭代到達邊界值時,進入調(diào)整待飛距離階段。當迎角指令迭代到16°時,實際高度依然遠大于標稱高度,切換進場方式為間接進場;當迎角指令迭代到29°時,實際高度依然小于標稱高度,調(diào)整HAC位置到最小位置。若實際高度與標稱高度之差依然>500 m,則飛行器無法返回著陸場,算法結(jié)束。軌跡迭代算法流程圖如圖5所示。
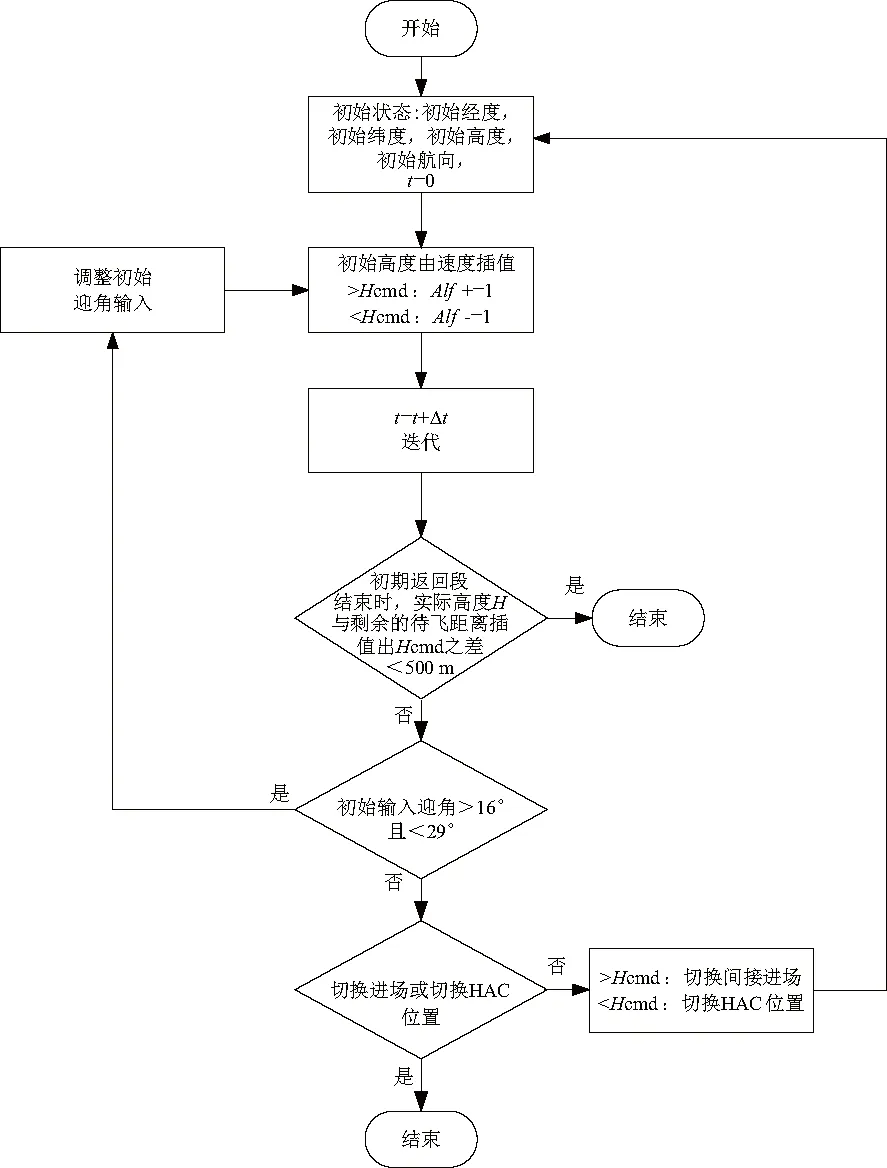
圖5 軌跡迭代算法流程圖
6 仿真實例驗證
給定3個初始返回狀態(tài)A、B、C,如表2所示,通過上述軌跡迭代算法判斷這3個不同的狀態(tài)能否返回著陸場。
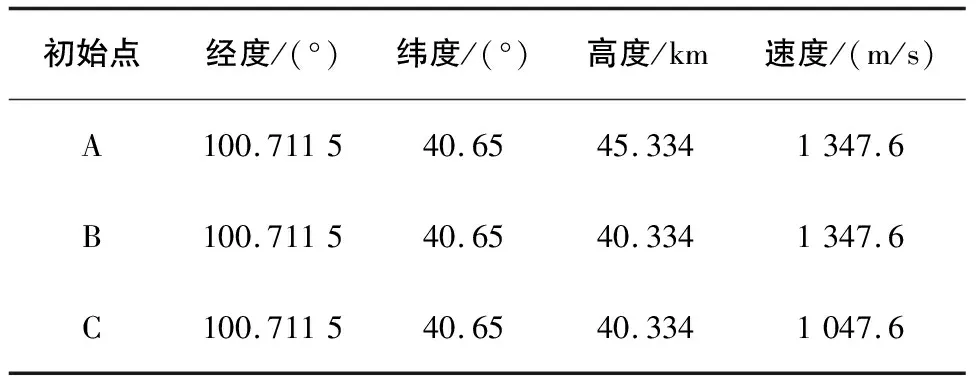
表2 初始返回點狀態(tài)
圖6是A點的返場狀況、圖7是B點的返場狀況、圖8是C點的返場狀況。藍色線是調(diào)整迎角指令時的狀態(tài)變化,綠色線是初期迎角指令一定,調(diào)整HAC位置的狀態(tài)變化,紅色線是最后一次軌跡迭代的結(jié)果。從圖6中可以看出,調(diào)整迎角和HAC位置可以顯著改變返場能力,但因為初始返回點高度、速度過大,初期返回段結(jié)束時,高度遠遠大于指令高度,因而在迎角指令和HAC位置的可調(diào)范圍內(nèi),飛行器不能返回著陸場;相比較狀態(tài)A、狀態(tài)B初始高度降低,初期返回段結(jié)束時高度更低,由最后一條紅線所示,經(jīng)過迭代,飛行器正好可以返回著陸場(本刊為黑白印刷,如有疑問請咨詢作者)。
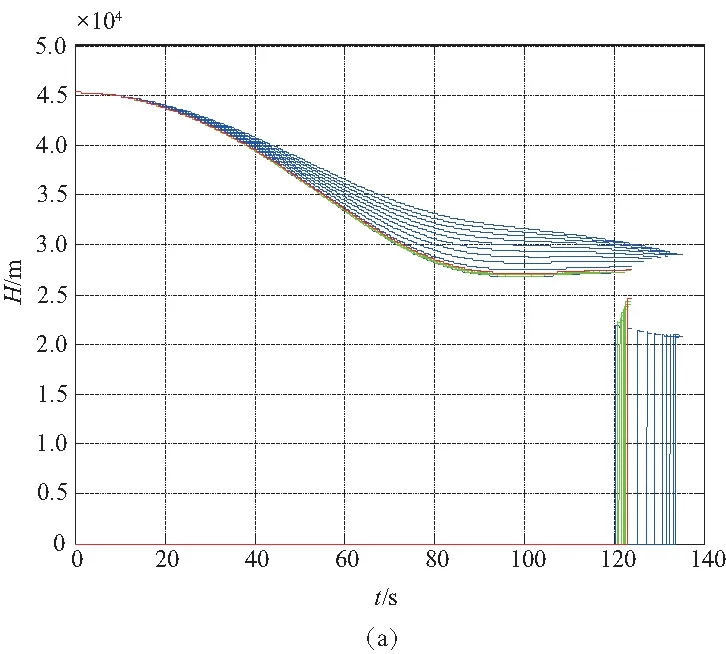
圖6 A點返場曲線
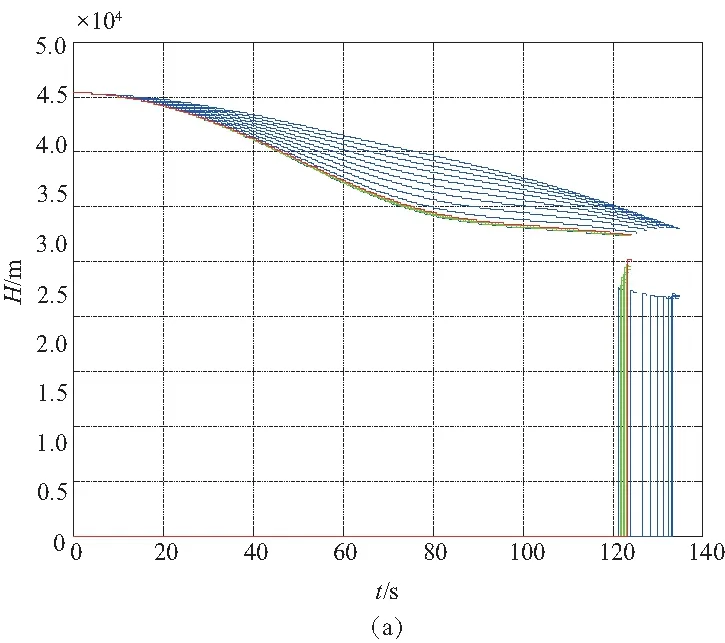
圖7 B點返場曲線

圖8 C點返場曲線
相比較狀態(tài)A和狀態(tài)B,狀態(tài)C的初始高度和速度均低,初期返回段結(jié)束時的高度明顯低于指令高度。由上文知,增大初期返回段的迎角指令,調(diào)近HAC的位置更低,經(jīng)過迭代,發(fā)現(xiàn)飛行器依舊不能返回著陸場。
7 結(jié)語
本文設(shè)計一種制導參數(shù)迭代算法,用來判斷亞軌道飛行器能否返回著陸場。由于初期返回段高度較高,空氣稀薄,氣壓低,制導系統(tǒng)縱向無法規(guī)劃高度和動壓剖面,無法根據(jù)初期返回點的能量狀態(tài)判斷飛行器的航程能力,進而判斷能否返場。通過調(diào)整初期返回段的迎角指令,調(diào)整HAC位置和切換進場方式改變待飛距離,在制導算法的迭代次數(shù)內(nèi)找到一組參數(shù)滿足高度的判斷條件,則當前狀態(tài)的飛行器能返回著陸場,否則算法結(jié)束迭代,不能返場。最后通過具體的實例驗證制導參數(shù)迭代算法的準確性。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農(nóng)機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
