新能源汽車實(shí)時(shí)監(jiān)控終端設(shè)計(jì)要點(diǎn)
2021-01-05 08:21:40胡舟宇李媛媛NaikaiDu
汽車實(shí)用技術(shù) 2020年24期
胡舟宇,李媛媛,Naikai Du
新能源汽車實(shí)時(shí)監(jiān)控終端設(shè)計(jì)要點(diǎn)
胡舟宇,李媛媛,Naikai Du
(保時(shí)捷工程技術(shù)研發(fā)(上海)有限公司,上海 210000)
對(duì)新能源汽車進(jìn)行車輛實(shí)時(shí)數(shù)據(jù)的實(shí)時(shí)監(jiān)控(Real-Time Monitoring,RTM)不僅是國(guó)家標(biāo)準(zhǔn)(GB/T32960- 2016)的要求,也是不斷提高新能源汽車安全運(yùn)行水平,推進(jìn)新能源汽車普及的最要手段。為了準(zhǔn)確完整地實(shí)現(xiàn)國(guó)標(biāo)相關(guān)要求,文章提出了新能源汽車實(shí)時(shí)監(jiān)控系統(tǒng)車載終端的設(shè)計(jì)基本要素及要求。在某品牌的RTM車載終端系統(tǒng)設(shè)計(jì)應(yīng)用的實(shí)例表明所提出的設(shè)計(jì)要求可以確保RTM數(shù)據(jù)上報(bào)的完全符合國(guó)標(biāo)要求。
RTM;新能源汽車;實(shí)時(shí)監(jiān)控;數(shù)據(jù)采集;GB/T32960
前言
近年來,由于我國(guó)政府相關(guān)政策的刺激,消費(fèi)者對(duì)新能源汽車NEV(New Energy Vehicle)的需求和使用呈明顯的上升趨勢(shì)。為提高新能源汽車的運(yùn)營(yíng)安全性,新能源汽車實(shí)時(shí)監(jiān)控系統(tǒng)RTM(Real Time Monitoring)應(yīng)運(yùn)而生,經(jīng)過幾年的發(fā)展,目前RTM已經(jīng)發(fā)展成為了基于國(guó)標(biāo)GB/T32960- 2016的新能源汽車數(shù)據(jù)實(shí)時(shí)監(jiān)控服務(wù)。
國(guó)標(biāo)GB/T32960-2016主要分為三個(gè)部分,如表1所示。第1部分[1]為總則,闡明對(duì)車載終端及企業(yè)后臺(tái)的總體要求,第2部分[2]為對(duì)車載終端的硬件設(shè)計(jì)要求,包括終端上報(bào)頻率,數(shù)據(jù)存儲(chǔ),工作電壓等要求。其中第3部分[3]規(guī)定車載終端與后臺(tái)的通訊協(xié)議及數(shù)據(jù)格式。
車企的所使用的車載終端及后臺(tái)需要經(jīng)過相關(guān)檢測(cè)部門的認(rèn)證才可以投入量產(chǎn),企業(yè)后臺(tái)收到數(shù)據(jù)后需轉(zhuǎn)發(fā)至政府平臺(tái),同時(shí)政府平臺(tái)會(huì)對(duì)企業(yè)平臺(tái)進(jìn)行定期監(jiān)管,如圖1所示。
根據(jù)規(guī)定RTM在國(guó)產(chǎn)新能源汽車上為強(qiáng)制安裝,在進(jìn)口新能源汽車上為選裝。由于安裝RTM是車企享受國(guó)家和地方新能源汽車補(bǔ)貼,及購(gòu)置稅減免的前提條件,RTM普遍受到國(guó)內(nèi)及國(guó)際各大整車廠的重視并投入大量的開發(fā)資源。由于國(guó)標(biāo)的描述粒度較粗,部分?jǐn)?shù)據(jù)項(xiàng)目沒有較為明確的定義,本文根據(jù)國(guó)標(biāo)過檢[4]及地方數(shù)據(jù)平臺(tái)數(shù)據(jù)質(zhì)量檢測(cè)[5]的要求,給出了系統(tǒng)設(shè)計(jì)的相關(guān)具體要求。

圖1 RTM數(shù)據(jù)上報(bào)過程
1 車輛RTM終端網(wǎng)絡(luò)拓?fù)湓O(shè)計(jì)
目前RTM的車載終端解決方案主要分為獨(dú)立式和集合式兩種,獨(dú)立式是指RTM車載最終成為一個(gè)獨(dú)立的控制器,甚至自帶GPS天線和數(shù)據(jù)天線;集合式是指RTM作為一項(xiàng)控制器服務(wù)或功能集成在整車原有車聯(lián)網(wǎng)控制器中,這兩種方案各有優(yōu)缺點(diǎn),如表1所示。
表1 RTM車載終端方案對(duì)比
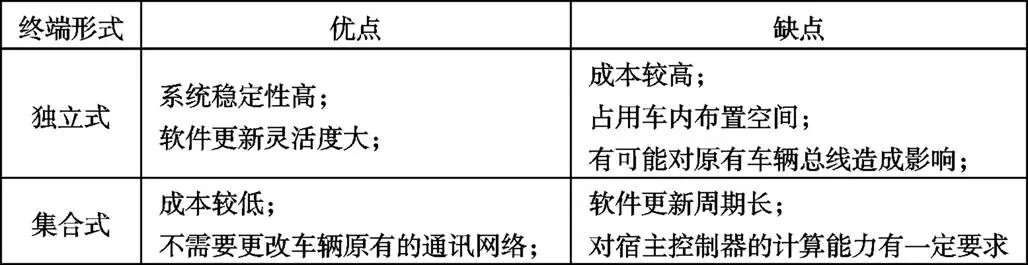
在詳細(xì)設(shè)計(jì)過程中應(yīng)針對(duì)車企的不同特點(diǎn),綜合評(píng)估后確定車載終端網(wǎng)絡(luò)拓?fù)洹@纾称放频目刂破鏖_發(fā)設(shè)計(jì)及更新周期較長(zhǎng),軟件開發(fā)釋放需要較長(zhǎng)時(shí)間,在引入RTM初期,使用獨(dú)立式終端設(shè)計(jì)是較為理想的方案,一旦產(chǎn)品不能滿足國(guó)標(biāo)要求可以進(jìn)行快速迭代而不影響到整車的開發(fā)進(jìn)度。
在RTM方案較為完善后,可以逐漸過渡到集合式方案以優(yōu)化成本。在過渡到集合式方案前,需仔細(xì)確認(rèn)宿主控制器的計(jì)算能力,存儲(chǔ)能力和控制器硬件規(guī)格是否可以符合國(guó)標(biāo)GB/T32960.2的要求。
2 RTM車輛總線報(bào)文設(shè)計(jì)
國(guó)標(biāo)中對(duì)RTM終端采集數(shù)據(jù)的分辨率要求為1Hz。為生產(chǎn)RTM數(shù)據(jù),RTM終端需要從車輛總線上獲得相關(guān)RTM數(shù)據(jù)項(xiàng)的原始報(bào)文,在系統(tǒng)設(shè)計(jì)之初需要確保所有RTM相關(guān)報(bào)文在總線通訊矩陣上已經(jīng)路由到RTM終端設(shè)備所在的總線,相關(guān)車輛實(shí)時(shí)數(shù)據(jù)要求及控制器名稱如表2所示。
除了保證RTM終端可以收到所有必需的原始信號(hào)外,還應(yīng)充分考慮到在一個(gè)采集周期內(nèi),信號(hào)之間的一致性與同步性。如圖2所示,在一個(gè)RTM信號(hào)采集周期內(nèi),電池單體電壓是不斷變化的。若RTM終端在t+300ms時(shí)刻采集到所有單體電壓測(cè)量值,在t+700ms時(shí)刻采集極值數(shù)據(jù)中的最大單體電壓值,則會(huì)造成上報(bào)數(shù)據(jù)的不一致性,即在0x06極值數(shù)據(jù)中顯示的最大單體電壓為單體n,在0x08可充電儲(chǔ)能裝置電壓數(shù)據(jù)中上報(bào)極值數(shù)據(jù)中上報(bào)最大單體電壓為單體m。
表2 RTM實(shí)時(shí)數(shù)據(jù)對(duì)應(yīng)信號(hào)源控制器

在設(shè)計(jì)RTM相關(guān)總線報(bào)文過程中,可以從以下幾個(gè)方面提高RTM數(shù)據(jù)的一致性:
(1)提高報(bào)文發(fā)送頻率,但是需要注意對(duì)報(bào)文優(yōu)先級(jí)和發(fā)送周期的合理設(shè)置,不能干擾正常的總線通訊;
(2)引入RTM數(shù)據(jù)校驗(yàn)檢查機(jī)制,在發(fā)送RTM數(shù)據(jù)前對(duì)數(shù)據(jù)一致性進(jìn)行檢查,并使用相應(yīng)判斷邏輯修正;
(3)相同控制器的相關(guān)RTM信號(hào),盡量在同一幀總線報(bào)文內(nèi)發(fā)送。
3 RTM報(bào)文生成邏輯設(shè)計(jì)
由于國(guó)標(biāo)要求車輛上報(bào)行駛和充電過程中的所有數(shù)據(jù),因此車輛RTM終端必須為一個(gè)KL30供電的控制器,在系統(tǒng)設(shè)計(jì)過程中需要設(shè)置合理的喚醒和休眠條件,以免對(duì)整車低壓電池造車不需要的消耗。同時(shí),準(zhǔn)確的時(shí)鐘輸入是RTM準(zhǔn)確工作的前提,時(shí)鐘源可以為GPS,4G網(wǎng)絡(luò)授時(shí)或NTP授時(shí)的組合方案,考慮到車輛在地下室等場(chǎng)既沒有GPS后沒有網(wǎng)絡(luò)的情況下,建議為車載終端安裝硬件時(shí)鐘。另一方面由于車身網(wǎng)絡(luò)(CAN網(wǎng)絡(luò))固有的非實(shí)時(shí)性[6],報(bào)文需要在仲裁機(jī)制下發(fā)送和接收,以對(duì)總線信號(hào)進(jìn)行緩存。典型的RTM報(bào)文生成邏輯如圖3所示。
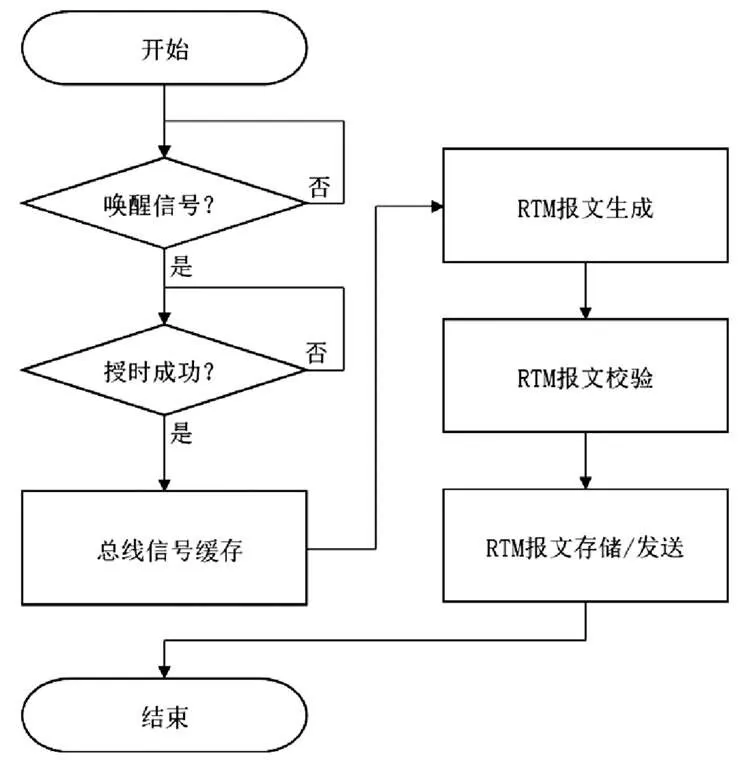
圖3 RTM報(bào)文生成邏輯
其中,“RTM報(bào)文生成”是指通過相關(guān)算法,將車輛總線上的特定信號(hào)轉(zhuǎn)換為符合國(guó)標(biāo)要求的數(shù)據(jù)格式,需注意上報(bào)數(shù)據(jù)需要在國(guó)標(biāo)要求的值域內(nèi);“RTM報(bào)文校驗(yàn)”是指檢查RTM報(bào)文的內(nèi)部一致性,相關(guān)的重點(diǎn)檢查項(xiàng)目有:
(1)電池包總電壓等于一個(gè)單體電壓之和;
(2)0x08電池單體電壓值需要與0x06極值數(shù)據(jù)及0x07報(bào)警數(shù)據(jù)報(bào)文相一致;
(3)0x09電池溫度測(cè)量值需要與0x06極值數(shù)據(jù)及0x07報(bào)警數(shù)據(jù)報(bào)文相一致;
(4)在純電模式下行駛,電機(jī)總輸入功率應(yīng)小于等于動(dòng)力電池輸出功率;
(5)電機(jī)電流需要與電機(jī)狀態(tài)保持一致;
(6)發(fā)動(dòng)機(jī)狀態(tài)需要與發(fā)動(dòng)機(jī)轉(zhuǎn)速和燃油消耗保持一致;
(7)車輛位置數(shù)據(jù)應(yīng)在合理的變化范圍內(nèi)(前后兩次定位點(diǎn)直線距離在車速積分的2倍距離范圍內(nèi));
(8)SOC不應(yīng)發(fā)生大于2%的跳變;
(9)累計(jì)里程應(yīng)遞增;
(10)檔位數(shù)據(jù)塊中的驅(qū)動(dòng)力狀態(tài)需要和電機(jī)轉(zhuǎn)矩,發(fā)動(dòng)機(jī)轉(zhuǎn)速,加速踏板位置等保持一致;檔位數(shù)據(jù)塊中的制動(dòng)力狀態(tài)需要和制動(dòng)狀態(tài)保持一致。
4 車載終端計(jì)算及存儲(chǔ)能力設(shè)計(jì)
國(guó)標(biāo)規(guī)定車載RTM終端每秒進(jìn)行一次數(shù)據(jù)的采集和存儲(chǔ),并以不超過30秒一次的頻率向后臺(tái)上報(bào)。因此車輛終端的最小存儲(chǔ)能力為:

式中:M為車載終端最少需要的存儲(chǔ)空間; L為單條實(shí)時(shí)報(bào)文長(zhǎng)度;s為保險(xiǎn)系數(shù)。
平臺(tái)同時(shí)對(duì)RTM數(shù)據(jù)上報(bào)有延時(shí)率要求,即對(duì)于實(shí)時(shí)報(bào)文,若后臺(tái)收到RTM報(bào)文的時(shí)間明顯大于RTM報(bào)文自帶的時(shí)間戳(>30s),則后臺(tái)會(huì)判定此報(bào)文延時(shí)。一段時(shí)間內(nèi)產(chǎn)生的延時(shí)報(bào)文越多,總體報(bào)文延時(shí)率越高,延時(shí)率也是國(guó)標(biāo)過檢的重點(diǎn)檢測(cè)項(xiàng)目。
產(chǎn)生延時(shí)的原因除了受網(wǎng)絡(luò)影響外,RTM車載終端的計(jì)算能力也十分重要。RTM車載終端需要保證在t時(shí)刻的報(bào)文產(chǎn)生后可以立即將報(bào)文發(fā)送出去。需要對(duì)RTM車載終端的操作系統(tǒng)和中斷優(yōu)先級(jí)進(jìn)行設(shè)計(jì)合理。
5 結(jié)論
為提高新能源汽車運(yùn)行的安全性,不斷推廣新能源汽車在我國(guó)的普及率,國(guó)家有關(guān)部分制定了車輛數(shù)據(jù)實(shí)時(shí)監(jiān)控的國(guó)家標(biāo)準(zhǔn)(GB/T32960-2016)。整車企業(yè)需要根據(jù)此標(biāo)準(zhǔn)設(shè)計(jì)RTM車載終端,在設(shè)計(jì)過程中需要對(duì)車載網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),總線報(bào)文,RTM報(bào)文生成邏輯,車載終端計(jì)算及存儲(chǔ)能力進(jìn)行具體設(shè)計(jì),以完全實(shí)現(xiàn)國(guó)標(biāo)的要求,同時(shí)保證車輛上報(bào)數(shù)據(jù)的真實(shí)性和可靠性,為后續(xù)的數(shù)據(jù)處理和數(shù)據(jù)分析提供有力支撐。
應(yīng)用上述設(shè)計(jì)要求的車載終端已順利通過了國(guó)標(biāo)對(duì)于車載終端性能和數(shù)據(jù)傳輸協(xié)議的檢測(cè)并獲得準(zhǔn)入。
[1] GB/T 32960.1-2016,電動(dòng)汽車遠(yuǎn)程服務(wù)與管理系統(tǒng)技術(shù)規(guī)范--第1部分:總則[S].北京:中國(guó)標(biāo)準(zhǔn)出版社,2016.
[2] GB/T 32960.2-2016,電動(dòng)汽車遠(yuǎn)程服務(wù)與管理系統(tǒng)技術(shù)規(guī)范--第2部分:車載終端[S].北京:中國(guó)標(biāo)準(zhǔn)出版社,2016.
[3] GB/T 32960.3-2016,電動(dòng)汽車遠(yuǎn)程服務(wù)與管理系統(tǒng)技術(shù)規(guī)范--第3部分:通訊協(xié)議及數(shù)據(jù)格式[S].北京:中國(guó)標(biāo)準(zhǔn)出版社,2016.
[4] 中國(guó)汽車技術(shù)研究中心,新能源汽車監(jiān)測(cè)平臺(tái)及車輛符合性檢測(cè)系統(tǒng)企業(yè)使用說明書[EB],2017.
[5] 李婷,上海市新能源汽車數(shù)據(jù)質(zhì)量檢測(cè)標(biāo)準(zhǔn)[EB],2020.
[6] 鄔寬明.CAN總線原理和應(yīng)用系統(tǒng)設(shè)計(jì)[M].北京航空航天大學(xué)出版社,1996.
Real-Time Monitoring Terminal Design for New Energy Vehicle
Hu Zhouyu, Li Yuanyuan, Naikai Du
( Porsche Engineering (Shanghai) Co. Ltd., Shanghai 210000 )
Real-time monitoring (RTM) for new energy vehicles (NEV) is not only a requirement of Chinese national standard (GB/T32960-2016), but also the most important means to continuously improve the safe operation and promote the popularization of NEV. In order to fulfill the relevant requirements of the national standard, key requirements of RTM vehicle terminal are proposed. An implementation of a RTM vehicle terminal design and development indicates that the proposed design requirements could ensure the RTM terminal works stably under complex working conditions and RTM data report fully meets the national standard.
RTM; New energy vehicle; Real time monitoring; Data collecting; GB/T32960
A
1671-7988(2020)24-01-03
U469.7
A
1671-7988(2020)24-01-03
胡舟宇,碩士研究生,工程師,就職于保時(shí)捷工程技術(shù)研發(fā)(上海)有限公司,研究方向:車聯(lián)網(wǎng)、智能汽車。
CLC NO.: U469.7
10.16638/j.cnki.1671-7988.2020.24.001
猜你喜歡
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
風(fēng)能(2015年4期)2015-02-27 10:14:36
風(fēng)能(2015年4期)2015-02-27 10:14:34
決策探索(2014年21期)2014-11-25 12:29:50
舒適廣告(2008年9期)2008-09-22 10:02:48
