基于RecurDyn的2K-V型減速機回差仿真研究
2021-01-05 08:22:06韓林山魏征溫泉王大兵
汽車實用技術 2020年24期
韓林山,魏征,溫泉,王大兵
基于RecurDyn的2K-V型減速機回差仿真研究
韓林山,魏征,溫泉,王大兵
(華北水利水電大學 機械學院,河南 鄭州 450045)
通過SolidWorks軟件對2K-V型減速機進行三維實體建模,利用RecurDyn軟件進行多體動力學的回差分析。以2K-V110E型減速機為例,基于高精度測量儀對其進行實體數據的測繪,建立含有偏差上下限的針齒半徑、曲柄軸偏心距、軸承游隙等誤差的虛擬樣機與依據圖紙繪制的虛擬樣機進行對比分析,驗證了所建立的回差虛擬樣機模型的正確性。
2K-V型減速機;回差;高精度測量儀;虛擬樣機
前言
2K-V型減速機是一種新型傳動機構,它采用了漸開線齒輪和擺線針輪復合傳動的行星傳動形式,具有傳動比大、結構緊湊、傳動平穩、傳動精度高、使用壽命長等優點,因此被廣泛應用于工業機器人中。回差是指輸入軸反轉時,輸出軸在運動時滯后于輸入軸的滯后量。對于2K-V型減速機來說,回差體現減速機設計精度以及傳動誤差的關鍵性因素,它主要分為三方面:因加工及裝配引起的幾何回差,因扭轉剛度及彈性變形引起的剛度誤差、因減速機轉速導致溫升而引起的溫度回差。本文主要針對2K-V型減速機的幾何回差進行仿真研究,通過對實際測得的幾何數據進行三維實體建模,利用RecurDyn軟件完成虛擬樣機回差仿真分析,驗證了所建立的回差虛擬樣機模型的正確性,為后續2K-V型減速機誤差的研究奠定了基礎。
1 2K-V型減速機傳動原理
2K-V型減速機整體結構較復雜,為了更加直觀的表述其傳動原理,可將其簡化為如圖1所示,主要零部件有行星輪、擺線輪、行星架、太陽輪、曲柄軸、針齒殼,該減速機是二級行星減速機構,其中標準直齒輪嚙合機構為第一級減速機構,少齒差擺線針輪嚙合機構為第二級減速機構。

圖1 2K-V型減速機機構簡圖
2 回差仿真流程及方案確定
本文采用RecurDyn多體動力學仿真軟件進行2K-V型減速機回差仿真計算,并制定回差仿真方案。首先將2K-V型減速機零件各項誤差等效處理,利用SolidWorks三維建模軟件建立含有誤差項虛擬樣機1與虛擬樣機2模型,設置零件質量屬性,添加約束、電機、接觸及扭矩,最后導入RecurDyn軟件進行2K-V型減速機回差仿真,仿真流程圖如圖2所示。

圖2 基于RecurDyn回差仿真的流程圖
根據回差的定義,在仿真過程中設置RecurDyn模型實現不斷正反轉,為了實現輸入軸不斷正反轉且正轉角度大于反轉角度,同時考慮換向平穩,在輸入軸添加轉速為=sin()+形式的正弦函數,其計算公式如公式(1)所示,對輸出軸進行n次回差進行測試。

式中:
φ——第次測試的回差值(′);
t——輸入軸第次換向的時間(s);
t——輸出軸第次換向的時間(s);
θt——輸入軸t時刻的轉角(°);
θt——輸出軸t時刻的轉角(°)。
3 仿真模型的建立
以2K-V110E型減速機為例,根據高精度測量儀測繪數據進行三維實體建模,通過分析靈敏度,取其主要誤差項的偏差上限及偏差下限,如表(1)樣機誤差參數,設置誤差參數,從而建立有誤差項的虛擬樣機1和虛擬樣機2。
在對2K-V110E型減速機進行三維實體的建模過程中需要特別注意擺線輪模型的建立,由于擺線輪漸開線的形成比較復雜,一般采用方程驅動方式來建立齒廓曲線,如公式(2)所示,該方法能夠方便調節擺線輪各個誤差的參數。
表1 虛擬樣機誤差參數


式中:
r——針齒分布圓半徑(mm);
r——針齒半徑(mm);
i——擺線輪針齒間的相對傳動比;
1——短幅系數;
——嚙合相位角(°);
——偏心距(mm)。
其余零件按照測繪數據依次進行三維實體建模,在建模過程中省去倒角、螺栓、軸承、孔等不會對整體運動造成影響的細節,根據零件配合關系完成裝配體配合。完成后的裝配體模型如圖(3)所示。在導入RecurDyn進行回差仿真之前需要對其進行干涉檢驗,保證后續仿真計算的準確性。

圖3 裝配體模型
4 基于RecurDyn回差仿真計算
4.1 RecurDyn的模型導入
(1)RecurDyn初始條件的設置
設置模型名稱、單位以及重力方向,采用國際單位制MMKS(毫米、千克、牛頓、秒),將建立的2K-V110E型減速機裝配體保存為Parasolid(*.x_t)格式導入RecurDyn中,修改該模型的質量及材料屬性。
(2)建立約束
將裝配體導入RecurDyn后,根據 2K-V型減速機裝配體結構特點添加約束,約束的添加類型如表2所示。
表2 設置約束副表

4.2 驅動設置
輸入軸驅動轉速采用=1100d*sin(45*time)+600d正弦函數,而負載轉矩按照額定轉矩的3%設置,設置大小為33N·m,仿真時間設置為1s,進行多體動力學仿真。
4.3 仿真結果
利用RecurDyn對2K-V110E型減速機裝配體模型幾何回差進行多體動力學仿真,得到輸入軸、輸出軸轉速及轉角仿真結果,后處理得到輸入軸(太陽輪)轉角和轉速曲線,輸出軸(法蘭盤)轉角和轉速曲線,如圖4~圖7所示。

圖4 輸入軸轉角

圖5 輸入軸轉速

圖6 輸出軸轉角

圖7 輸出軸轉速
通過RecurDyn對樣機1和樣機2進行多體動力學回差仿真分析得到回差分析數據,觀測輸入輸出25次換向時間和對應時刻輸入軸轉角值,利用公式(1)計算其回差值大小,對計算結果進行數據擬合得到圖8所示仿真曲線。
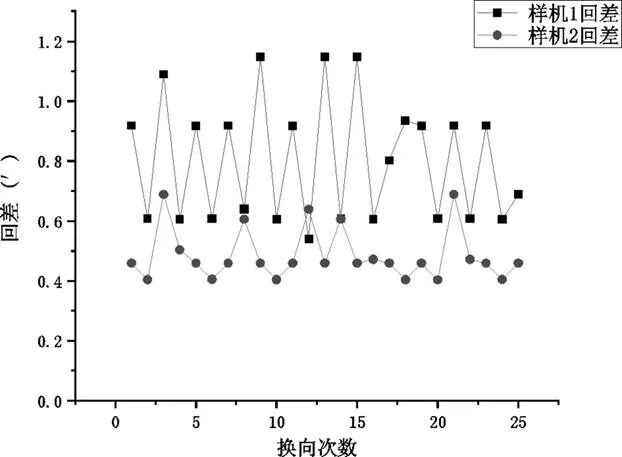
圖8 回差仿真結果擬合曲線
由圖8可知,樣機1和樣機2回差成周期上下波動,這是由于擺線輪齒圈徑向圓跳動引起的,仿真得出的減速器回差為0.4044′~1.1478′,理論計算回差設計值為0.3764′~ 1.4370′,通過對比仿真分析結果與設計結果可知仿真結果在設計結果誤差允許范圍之內,驗證了多體動力學仿真模型的正確性。
5 結論
利用SolidWorks與RecurDyn兩款軟件的聯合仿真,建立了2K-V110E型減速機系統動力學模型,實現了二級行星齒輪系統的動力學回差仿真,得到了輸入軸和輸出軸的轉角速度以及轉速,通過計算得到回差仿真擬合曲線,將仿真所得數據與理論計算結果進行對比,在設計范圍之內,說明仿真模型的幾何回差技術研究的可行性,為后續動力學以及誤差仿真研究奠定了基礎。
[1] 何衛東,李欣,李力行.機器人用高精度RV傳動中擺線輪修形對回差影響的研究[J].機械傳動.1999.23(1):24-25.
[2] 張東生,關天民.針擺傳動齒形優化與動態回程誤差分析[J].機械傳動.2007,31(2):69-71.
[3] 段欽華.2K-V型行星傳動的原理分析[J].煤礦機械,2006(12):68- 70.
[4] 常安全,張迎輝,何衛東,王曉雨.基于多體動力學仿真的RV減速器角傳動誤差虛擬樣機的建立[J].機械傳動,2018,42(09):168-172.
[5] 張春亮,李充寧,戚厚軍.基于Pro/E和ADAMS的2K-V型減速機的運動學仿真[J].機械傳動,2008,32(3):43-45.
Simulation study of 2K-V reducer reversal rased on RecurDyn
Han Linshan, Wei Zheng, Wen Quan, Wang Dabing
(College of Mechanical,North China University of Water Resources and Electric Power, Henan Zhengzhou 450045)
The 3D solid modeling of the 2K-V reducer is carried out by SolidWorks software, and the backlash analysis of multi-body dynamics is carried out by RecurDyn software. Taking the 2K-V110E reducer as an example, based on the high-precision measuring instrument, the physical data is surveyed and mapped, and the virtual prototype of the pin tooth radius with the upper and lower limits of the deviation, the crankshaft eccentricity, the bearing clearance and other errors is established. According to the drawings, the contrastive analysis between these two virtual prototypes has verified the correctness of the established virtual prototype model.
2K-V reducer; Backlash; High precision measuring instrument; Virtual prototype
A
1671-7988(2020)24-117-03
U467
A
1671-7988(2020)24-117-03
韓林山(1964-),教授,博士,就職于華北水利水電大學機械學院,研究方向:機械設計及理論。
10.16638/j.cnki.1671-7988.2020.24.039
CLC NO.: U467
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2021年4期)2021-07-23 01:46:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
光學精密工程(2016年6期)2016-11-07 09:07:19
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
核科學與工程(2015年4期)2015-09-26 11:59:03
中國艦船研究(2014年5期)2014-05-14 06:43:09
