一種新型水下網箱清洗機器人的設計探索
2021-01-05 06:08:14房熊
機電設備 2020年6期
關鍵詞:設計
房 熊
(1.中國水產科學研究院 漁業機械儀器研究所,上海 200092;2.農業農村部遠洋漁船與裝備重點實驗室,上海200092;3.海洋國家實驗室深藍漁業工程裝備技術聯合實驗室,山東青島266237)
0 引言
中國是漁業消費大國同時也是世界水產養殖大國,截至2016 年,我國水產養殖總產量已達5 200萬噸。與2015年相比,總量增長約4.87%,并且我國水產養殖總量占世界水產養殖產量的46.89%。據統計,中國人均水產品占有量為38.41 kg,其數值超過世界人均占有量的1倍[1]。豐富水產品資源為中國人民提供了約1/3的動物蛋白來源,并且在各地方形成了不少優良傳統以及多姿多彩的民俗民風。以水產養殖為主體的水產業在確保我國食物安全、豐富居民“菜籃子”、改善居民食品質量等方面都作出了突出貢獻[2-3]。
網箱養殖是水產養殖生態學的最重要的組成部分,同時網箱養殖也是生態學、微生物學、環境科學等多學科交叉領域的應用研究對象。網箱養殖是一個自循環的封閉生態鏈,其中最主要的關系是網箱養殖的魚類、養殖活動與養殖水體環境等相互影響,共生共存的緊密關系[4-5]。一個成功的網箱養殖必須根據當地環境狀況特征為養殖戶提供因地適宜的養殖海域以及完善的網箱養殖配套裝備和服務。現代的網箱養殖包含多種項目,主要包括網箱養殖水體環境管理、養殖容量評估和深遠海養殖等。其目標是為網箱養殖活動的健康、可持續發展(即保護養殖區生態環境、合理利用資源和提高經濟效益)奠定基礎[6]。
1 現有網箱養殖存在的問題分析
1.1 網箱養殖的清理問題
網箱養殖時網片上常受到海洋浮游動植物的攀附及滋生,微生附著物不但影響網箱內外水體交換而且增加了網箱外部水流對網箱的壓力從而導致網箱結構受損,更嚴重的是如果被牡蠣等硬殼貝類附著的話將導致網衣增重急劇增加從而根本上破壞了網箱的網片,可能產生魚類出逃的重大事故[9]。因此網箱養殖的重點在于必須保證養殖網箱網衣的清潔以確保網箱內養殖區域海水與外界海水的自然流動性,從而保證使得養殖區域內的魚類處于最佳的生活環境。目前在我國內常用的大型網箱類型主要為重力式全浮網箱和浮繩式網箱等,但這兩大類的網箱都是屬于靜態式網箱他們都有一些共同的缺點,比如:抗赤潮能力差、對近海污染較為嚴重、無法規模化和集中管理、清洗難度大等[10-12]。
近年來,國內的各大企業和科研院所針對網箱存在的問題做了一些科研攻關,特別是針對最為突出的網箱日常防污做了大量的工作,但到目前為止現階段我們采取的主要方法分別是:
1)采用定期更換清洗網衣,該方法是通過潛水員到水下采用人工手動的操作方式進行網衣更換和清潔,但清理效果不佳,并且極易導致養殖魚類產生應激反應使得其相互撞擊從而導致魚體外表損傷,其他微生物病蟲害侵入魚體等。
2)在網衣表面上涂一層防生物附著涂料,這種防生物涂層材料具有極低的黏度并且擁有較強表面張力等物理特性可以快速的滲透網衣包裹網絲,此外涂層還具有固含量低的物理特點,加入成型塑化劑后可以使網衣表面成膜物的厚度非常薄,這樣涂層對網衣的載荷壓力就很小且在海水中有著較高的減阻性,通過使用新型的防生物附著涂層可以大幅提高網衣的防污能力,明顯減少網衣上貝殼類和藻類等海生物的附著。在早期的防生物附著技術中曾經采用過將有機金屬編制成型添加到網衣中的方法但其具有一個非常嚴重的后果就是隨著時間的推移重金屬離子會擴散到海水中對養殖區域和整個海洋環境造成嚴重污染。但新型防生物附著涂層主要還是要依靠進口,目前相關的技術在國內還處于試驗研制階段并不成熟,并且進口的防生物涂層價格極其昂貴,普通的大多數養殖戶根本沒有能力接受[13-14]。
3)目前大多數養殖戶采用最為廣泛的方式是依靠潛水員攜帶高壓水槍定期潛入水中在水下對網衣進行清污,但這種方式養殖戶必須找經過相關培訓的專業人員進行操作,目前這樣的專業人員國內屈指可數,對于養殖戶來講時間和金錢的投入成本過大[15]。
因此近年來網衣的清洗成了網箱養殖行業的突出行業性焦點問題,除了加快研究網衣的防生物涂層技術攻關外以及網衣自身材料的防污技術外,現階段找出一種有效可行的水下網箱清洗機械設備不失為一種解決問題的重要渠道。
2 新型水下網箱清洗機器人的設計
2.1 系統組成及設計特征
新型水下機器人的主要分為2 個系統,一個是水下機器人本體,該部分主要負責水下網箱的清洗;還有一個是岸上控制及動力源系統,該系統負責操控水下機器人的人各項動作功能以及為機器人提供動力源。其工作原理是將高壓水泵搭載在水下移動平臺上,通過驅動機器人的四個輪子進行方向上的移動,從而使得清洗機器人到達所需清理的位置,通過岸上輸入的高壓水流并經過機器人底部的清理轉盤從而將網衣上附著的浮游生物、藻類等清理干凈。在控制方面,新型水下機器人采用模塊化設計理念,各種控制器單元集成在一塊水下PLC控制面板中并加以密封保護,并且通過優化設計和處理最大限度的保證了控制系統的可靠性和穩定性,為機器人在水下進行清理操作提供保證。此新型水下網箱清洗機器人具有結構可靠、操作方便、控制到位等特點,能夠很好地解決目前養殖行業網箱清理的行業難題。水下機器人外形結構如圖1所示。

圖1 水下機器人外形結構
2.2 動力計算設定
新型水下網箱清洗機器人在水下要完成清理的工作需要能夠做出各種機械動作,都是基于整個清洗機器人在水下是一個平衡的狀態,為了滿足該平衡狀態就需要主螺旋槳提供穩定且均衡的下壓力使得機器人能夠緊緊貼合在網衣上,因此主螺旋槳的動力設計是非常關鍵的,作為漁業水下機器人非常重要的核心部件為整個水下機器人提供下壓力。根據漁業水下機器人的作業需求、運動性能要求和低成本、民用化的經濟型目標,采用單體單發方案,即垂直面內單螺旋槳布置。根據水下機器人的預計總質量可計算主螺旋槳的預計功率,再根據布置方式確定螺旋槳選型[16-17]。

式中:Rt機器人的阻力,N;Ct為機器人總阻力系數,一般取3.5×103~4.9×103;ρ為流體質量密度,kg/m3;v為運動速度,m/s,S為機器人本體的濕表面面積,m2。
影響水下總阻力的主要因素有機器人的形體、表面粗糙度以及外接設備的形狀等。其中,機器人的本體阻力是水下機器人所受阻力的最主要部分,包括摩擦阻力Rf

當水下機器人在水中深度大于機器人本體長度1/3時,則可以不計興波阻力。本文中由于水下機器人需完全在水下進行清理工作,其在水下的深度遠超機器人本身的長度,因此在阻力計算中興波阻力完全不需要考慮[18-19]。閱相關資料并綜合考慮后,采用相關系數。根據水下機器人的大小尺寸,其本體全面積約為1.68 m2,預設對抗海水水流速度約為v=0.6 m/s,為了使得水下機器人能夠有足夠的下壓力停留在網衣表面上,設計中預留來了安全系數。安全系數取值為1.4,得到克服阻力所需的力為Rt=4 500 N,主螺旋槳所需最小功率P=211 W。
2.3 RO V 運動方程
水下機器人在水下運動時可以看做為一個整體的剛體,在剛體運動學理論中,每個運動的剛體在空間上都有6個自由度,其對應的有6個運動方程式,具體如式(4)[20]
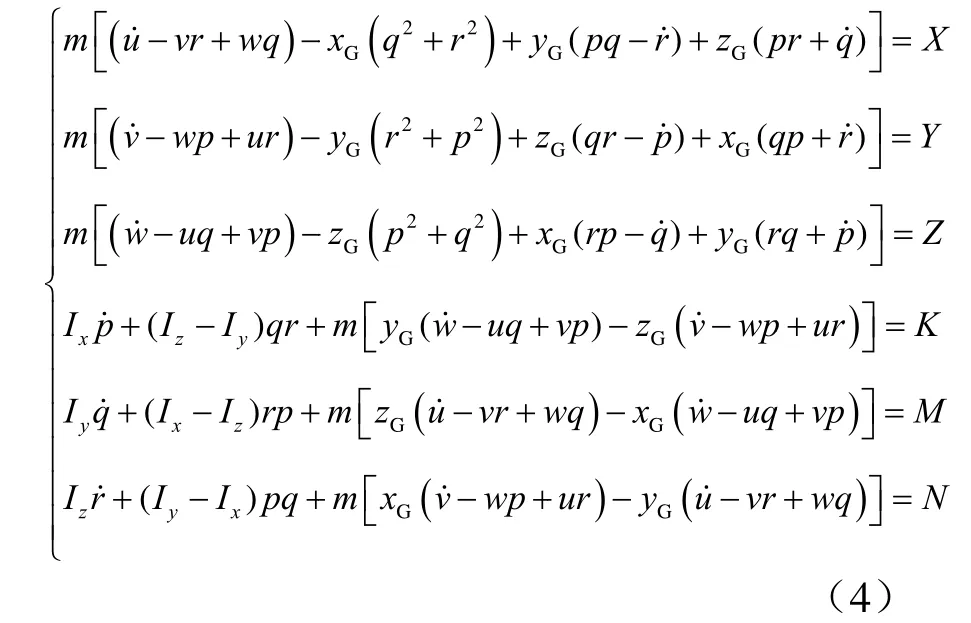
式中:為了簡化設計,把運動坐標系的原點0與水下機器人的重心重合,于是線性運動方程和旋轉運動方程可以大大簡化為

2.4 水下平衡分析
作為水下清洗機器人,其最重要的一個設計關鍵點即如何使得機器人在水下清理網箱的時候能夠保持平衡,不但在水平狀態下能保持平衡而且在豎直狀態下也能保持平衡,且使得清洗機器人緊貼住網箱的網衣。為此專門進行了清洗機器人的水下力學分析并且優化力學設計。通過創新性的設計,利用螺旋槳產生的推力去克服水流噴射反力的水平分力即F5>F3,螺旋槳產生的旋轉力去平衡清洗圓盤的旋轉力即F2=F4,這樣清洗機器人在水下工作時,水平方向和垂直方向2 個坐標系都處于平衡狀態,則清洗機器人達到一種相對平衡靜止狀態,因此無論是網箱的底部還是網箱側壁位置,清洗機器人均能夠牢牢貼附網衣進行工作,如圖2所示[21]。

圖2 水下力學平衡分析
3 結論
本文針對近年來網箱養殖行業中突出的網箱網衣清洗問題進行研究并創新地設計了一種新型水下網箱清洗機器人,并依托網箱養殖行業現有條件,利用模塊化集成化理念思路進行設計和優化,通過創新性的設計將機器人在水下的力進行平衡和約束使得清洗機器人能夠很好的貼合網衣,且無論是水平狀態還是豎直狀態下均可近距離對網衣進行清理。引入高壓水流對通過機器人底部的旋轉盤向四周流射并將網衣上的附著物進行清理,不但能將網衣清理干凈,還不損傷網衣。
通過創新性的設計,水下清洗機器人采用4個獨立驅動的輪子作為驅動方式,可在水下很好地進行各個方向上的移動,此外該水下清洗機器人的前置高清攝像裝備可以觀察和記錄整個過程,大大方便了岸上工作人員進行操作,極大地節省了人工成本,提高了工作效率。直觀可視的操作界面滿足了各種網箱養殖戶的需求,且該新型水下網箱清洗機器人的研制為大規模網箱養殖行業以及深遠海網箱養殖行業的發展提供了可靠的技術支撐。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
