多臂機旋轉變速機構凸輪廓線建模與重構
2021-01-05 02:28:54肖志濤尹洪環(huán)于鴻彬2蔣秀明2邵宏宇
紡織學報 2020年5期
肖志濤, 尹洪環(huán), 于鴻彬2,, 蔣秀明2,, 邵宏宇
(1. 天津工業(yè)大學 電子與信息工程學院, 天津 300387; 2. 天津工業(yè)大學 天津市現(xiàn)代機電裝備技術重點實驗室, 天津 300387; 3. 天津工業(yè)大學 機械工程學院, 天津 300387; 4. 天津大學 機械工程學院, 天津 300072)
在紡織機械中,多臂機又稱為“多臂提綜裝置”,是無梭織機上使用比較普遍的開口裝置。多臂機必須具有良好的力學性能,以適應織機的高速生產[1]。旋轉式電子多臂機是一種積極式多臂機。近年來,制造商已經展示出運行速度達1 200 r/min的多臂機,這使得在高速噴氣織機和噴水織機上采用旋轉式多臂機成為可能。提綜機構是旋轉式多臂機核心部分,其將電動機輸入的勻速轉動轉化為提綜臂的變速擺動,進而實現(xiàn)綜框在豎直方向的變速上下運動[2]。提綜機構的核心組件是旋轉變速機構,旋轉變速機構關鍵部件共軛凸輪直接影響綜框的運動特性,影響織機的織造質量和效率,因此,對多臂機旋轉變速機構凸輪廓線進行建模與重構的研究具有重要意義。
目前,針對多臂機旋轉變速機構的研究,張遠華等[3]建立了多臂機旋轉變速機構三維模型,并進行了運動學仿真分析。沈毅等[4-5]針對GT421型旋轉式電子多臂機提綜機構進行研究,從運動學設計角度出發(fā),對共軛凸輪外輪廓線的極坐標進行理論推導;對主軸和凸輪擺臂的相對停頓時間做了理論分析和計算;從靜力學設計角度分析多臂機提綜機構的運動機制,對多臂機主傳動構件建立運動學模型,并進行了相關的運動學仿真研究。EREN等[6-7]通過討論給定多臂機主軸的特定輸出運動曲線,得出提綜機構帶動綜框的運動特性,比較了多臂機偏心機構和旋轉變速機構對綜框運動特性的影響。以上研究為多臂機旋轉變速機構的設計和分析奠定了重要基礎。
以旋轉變速機構為研究對象,基于測繪的凸輪輪廓線或者基于給定的主軸運動曲線,求解出綜框的運動特性,并進行運動學仿真分析。同時,隨著織機轉速越來越高,多臂機的開發(fā)朝著高速、高效、高可靠性方向發(fā)展[8-10]。旋轉變速機構作為旋轉式多臂機提綜機構的核心部件,深入研究其凸輪廓線數(shù)學模型的構建,根據(jù)織機工藝要求逆向求解凸輪廓線并針對凸輪廓線優(yōu)化分析具有重要意義。目前針對凸輪輪廓設計,特別是減少振動,提高穩(wěn)定性和延長使用壽命[11-12]等方面的研究主要有:STODDART等[13-14]建立了從動件振動幅度和凸輪速度之間的特征關系。MERMELSTEIN等[15]在滿足必要的約束條件下,使用分段多項式來優(yōu)化相應運動量參數(shù)。QIU等[16]使用B樣條生成優(yōu)化的運動曲線,同時依據(jù)多設計目標,包括控制殘余振動等來優(yōu)化凸輪廓線。NORTON等[17]對凸輪廓線設計和制造提供重要理論依據(jù)和指導。
為此,本文在分析提綜機構運動原理,研究旋轉變速機構凸輪廓線數(shù)學模型的構建方法基礎上,建立基于綜框運動特性的數(shù)值求解凸輪廓線方法,構建基于綜框運動特性的凸輪廓線逆向求解系統(tǒng),解決測繪凸輪廓線導致綜框運動特性曲線不連續(xù)和不光滑的問題。在此基礎上,對獲得的非中心對稱凸輪廓線運用粒子群算法[18-20]進行優(yōu)化和重構,為旋轉式多臂機整體性能的改善提供理論方法。
1 提綜機構運動原理
提綜機構包括多臂機旋轉變速機構、多臂機偏心機構、運動傳遞機構和綜框。旋轉變速機構工作原理如圖1所示。其中共軛凸輪(5和10)固定在多臂機箱體靜止不動,凸輪擺臂(2和8)鉸接在齒輪(1)上,并且可以繞其鉸接點轉動,從而將電機輸入的勻速圓周運動通過齒輪(1)傳遞給凸輪滾子(3、6、9和12),凸輪滾子沿著共軛凸輪(5和10)廓線運動,通過主軸連桿(4和7)將織機的勻速轉動轉換成主軸(11)的旋轉變速運動。

圖1 旋轉變速機構工作原理Fig.1 Working principle of modulator
偏心機構、運動傳遞機構和綜框的工作原理如圖2所示。
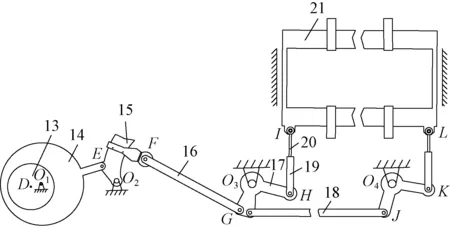
13—偏心盤凸輪;14—環(huán)形連桿;15—提綜臂;16—提綜臂連桿; 17—轉臂;18—轉臂連桿;19—綜框連桿; 20—支撐連桿;21—綜框。圖2 偏心機構、運動傳遞機構和綜框工作原理Fig.2 Working principle of eccentric mechanism, motion transmission mechanism and heald frame
偏心機構由偏心盤凸輪、環(huán)形連桿、提綜臂組成。偏心盤凸輪,因其旋轉中心與其幾何中心不同,故偏心機構等效機構為曲柄搖桿機構(O1DEO2)。當旋轉變速機構的齒輪轉動時,主軸的旋轉變速運動傳遞到提綜臂,實現(xiàn)提綜臂的上下擺動。運動傳遞機構包括提綜臂連桿、轉臂、轉臂連桿、綜框連桿、支撐連桿,其等效機構是四連桿機構(O2FGO3)和曲柄滑塊機構(O3HI),提綜臂的擺動通過運動傳遞機構傳遞給綜框,實現(xiàn)綜框的上下變速運動。
2 旋轉變速機構凸輪廓線建模
在織機織造過程中,綜框帶動經紗,決定了經紗的運動特性。為保證平穩(wěn)的經紗織造過程,綜框在運動中,要求速度平穩(wěn)無突變,綜框從靜止到運動和從運動到靜止的過渡要緩慢,同時要求盡量降低加速度以減小對經紗的沖擊。目前常用的測繪方式得到的凸輪廓線,會導致綜框在速度、加速度和躍度上存在明顯的波動及跳躍現(xiàn)象。
為解決凸輪廓線產生的上述問題,采用指定綜框運動特性逆向求解凸輪廓線方法。由于11次多項式[21]滿足位移、速度、加速度和躍度連續(xù),并且加速度較低,較接近綜框的運動特性,因此,初步確立該11次多項式作為綜框運動位移函數(shù),進而基于綜框運動特性的數(shù)學表達,建立逆向求解凸輪廓線的數(shù)學模型。
2.1 偏心機構、運動傳遞機構和綜框建模
圖3示出多臂機偏心機構、運動傳遞機構和綜框簡圖,連桿O3G與曲柄O3H剛性連接,其夾角φ9繞O3旋轉,曲柄O3H與X軸正向夾角為φ10。

圖3 偏心機構、運動傳遞機構和綜框簡圖Fig.3 Schematic diagram of eccentric mechanism, motion transmission mechanism and heald frame
L(u)為綜框以多臂機齒輪轉角θ為變量的位移函數(shù),定義為L(u)=S(u)+S0,其中,u=θ/β,0°≤θ≤180°,β=180°;S0為綜框重心I到X軸的距離;S(u)為該11次多項式,方程表達式如下:
S(u)=h(336u5-1 890u6+4 740u7-
6 615u8+5 320u9-2 310u10+420u11)
(1)
式中,h為綜框的升程。
在圖3中設笛卡爾直角坐標系(X,Y),以中心點O1作為坐標原點,
設:
F1(e,lHI,lO3H,L(u),φ10)=0
(2)
有:
(3)
則:
(4)
式中,偏心距e、lO3H和lHI為曲柄滑塊機構(O3HI)中的已知參數(shù)。
在運動傳遞機構的四連桿機構(O2FGO3)中,由幾何關系可知:
(5)
設:
F2(lO2O3,lO3G,lFG,lO2F,φ8,φ6)=0
(6)
則:
(7)
式中:lO2O3,lO3G,lFG,lO2F,φ9為已知參數(shù),φ10可由式(4)求得,φ8=φ9+φ10。
由式(7)解得:
(8)
(9)

根據(jù)運動原理知輸出角φ2可由角φ4求得。
由幾何關系可知:
(10)
設:
F3(lO1O2,lO2E,lDE,lO1D,φ4,φ2)=0
(11)
則:
(12)
式中:lO1O2,lO2E,lDE,lO1D,φ5為已知參數(shù);φ6可由公式(9)求得,且滿足φ4=φ5+φ6。
由公式(12)解得:
(14)

2.2 旋轉變速機構凸輪廓線建模
圖4示出旋轉變速機構簡圖。齒輪的旋轉角為θ,ω為齒輪的角速度,φ1為旋轉變速機構主軸旋轉角度,φ2是偏心盤凸輪的旋轉角度,φ2可從式(14)獲得。結合φ1運動規(guī)律,建立旋轉變速機構凸輪廓線求解模型。
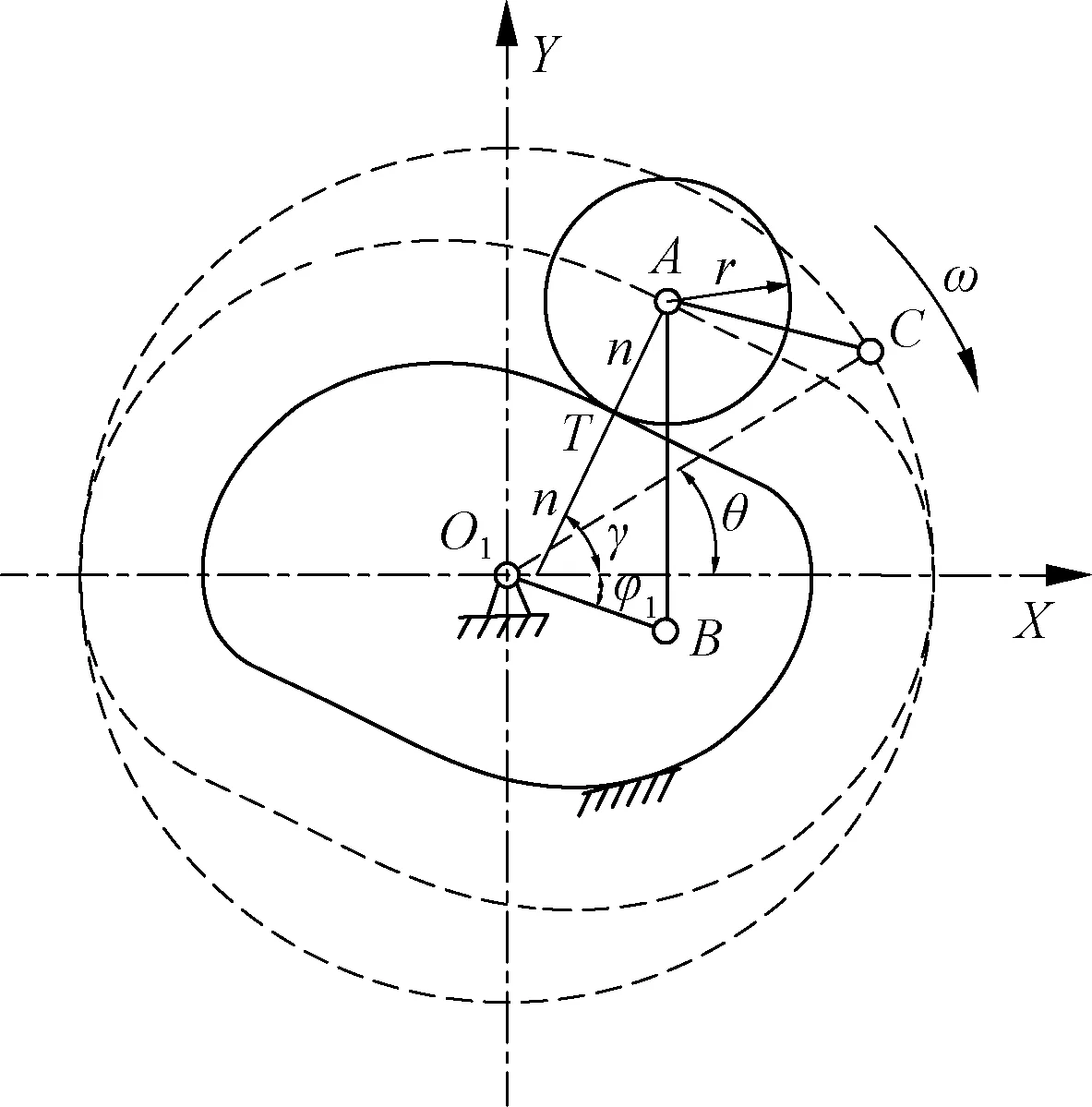
圖4 旋轉變速機構簡圖Fig.4 Schematic diagram of modulator
根據(jù)幾何關系有:
(15)
求得凸輪理論廓線上任意點A的坐標:
(16)
yA=(C-Ax)/B
(17)

A1=A2+B2
B1=2AByB-2AC-2B2xB
xB=lO1Bcosφ1
yB=lO1Bsinφ1
xC=lO1Ccosθ
yC=lO1Csinθ
對于多臂機旋轉變速機構,凸輪實際廓線與理論廓線法線方向的距離等于滾子半徑r,沿凸輪理論廓線任意點A的法線方向取距離r,可獲得凸輪實際廓線上相應點坐標T(xT,yT),過凸輪理論廓線上A點處法線n-n的斜率為:
(18)
式中,γ為法線n-n與x軸夾角。
根據(jù)公式(18)可得:
(19)
根據(jù)公式(15)~(19)可以求出凸輪實際廓線上相應點T坐標:
(20)
至此,根據(jù)綜框的多項式運動特性,完成了多臂機旋轉變速機構凸輪廓線建模,同時獲得了多臂機提綜機構各桿件的運動特性與齒輪旋轉角度之間的關系。
3 旋轉變速機構凸輪廓線求解
設定多臂機提綜機構的物理參數(shù)和幾何尺寸如表1所示。
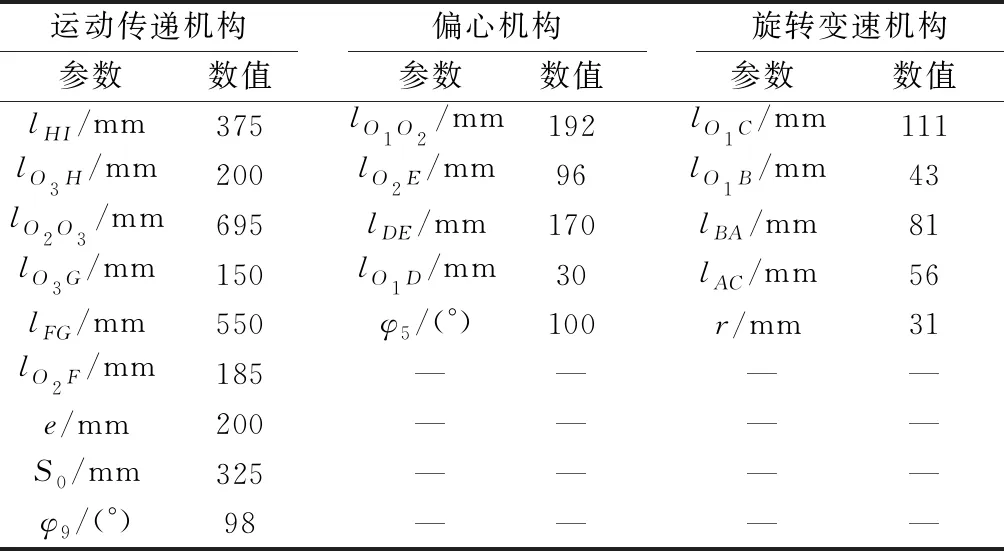
表1 提綜機構的物理參數(shù)和幾何尺寸Tab.1 Physical parameters and geometric dimensions of shedding mechanism
利用公式(1)~(20),采用Microsoft Visual Studio VB.NET編程進行數(shù)值計算,逆向求解獲得凸輪廓線如圖5所示。由于多臂機偏心機構是無急回特性的曲柄搖桿機構,去程和回程的運動特性不同,因而獲得對應于去程和回程的凸輪廓線也不同。其中曲線S1為偏心機構(見圖3)連桿O1D從D0點逆時針運動到D1點形成的半段凸輪廓線,曲線S2為連桿O1D從D0點順時針運動到D1點形成的另半段凸輪廓線,由曲線S1和S2形成的完整凸輪廓線并非中心對稱。為了直觀獲得非中心對稱程度,將曲線S1沿O1點順時針旋轉180°形成曲線S1′,與曲線S2比較可知非中心對稱程度。
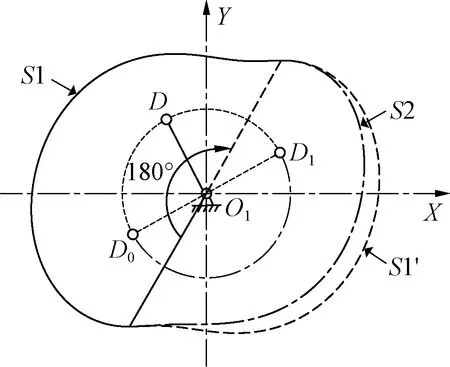
圖5 逆向求解獲得凸輪廓線Fig.5 Conversely obtained cam profiles.
根據(jù)曲線S1和S2形成的非中心對稱凸輪廓線及表1中各構件參數(shù),運用SolidWorks軟件建立提綜機構數(shù)字樣機,通過SolidWorks Motion進行運動仿真分析,獲得齒輪旋轉1個周期內綜框的無量綱運動特性。圖6示出綜框歸一化的位移、無量綱速度、無量綱加速度和無量綱躍度曲線,其中歸一化幅值為106.8 mm,同時示出11次多項式曲線。

圖6 非中心對稱凸輪產生的綜框 運動特性與11次曲線比較Fig.6 Comparison of heald frame motion characteristics generated by noncentral symmetrical cam and 11th curves.(a) Normalized displacement and dimensionless velocity;(b) Dimensionless acceleration and jerk
將圖6中黑色曲線(11次多項式曲線)與灰色曲線(逆向求解獲得凸輪產生的綜框運動特性)對比結果表明,在齒輪旋轉半個周期內求解的綜框運動特性與11次多項式曲線完全相同,驗證了所建立的逆向求解凸輪廓線模型的正確性。通過對圖6分析可知,綜框在上升段和下降段產生的綜框運動特性相同,并且齒輪正轉和反轉產生的綜框運動特性也相同。但是,由于多臂機旋轉變速機構中的凸輪是共軛凸輪,上述獲得凸輪廓線并非中心對稱,因此擬采用粒子群算法重構凸輪廓線,使得凸輪廓線基本中心對稱,同時符合綜框的運動特性。
4 旋轉變速機構凸輪廓線重構
4.1 粒子群優(yōu)化算法
針對凸輪廓線優(yōu)化問題,粒子群算法[22-23]數(shù)學描述為:在由N個粒子組成的三維搜索空間中,第i個粒子的位置可表示為:xi=(xia,xib,xic),運動搜索到的最優(yōu)位置是Pi=(pia,pib,pic),xi(t)為第i個粒子在t時刻的位置,粒子速度vi=(via,vib,vic),vi(t)為第i個粒子在t時刻的速度,群體中全部粒子迄今搜索到的最優(yōu)位置為pg=(pga,pgb,pgc),對于每一次迭代,其第d維按以下方程進化:
vid(t+1)=vid(t)+cp×r1×[pi(t)-xi(t)]+
cg×r2×[pg(t)-xi(t)]
(21)
式中:t為當前時刻;cp,cg為學習因子,為非負常數(shù),用來調節(jié)粒子飛行的步長;r1和r2為屬于[0,1]的隨機數(shù)。
粒子群算法的流程如下:
1)設定學習因子cp和cg,最大迭代次數(shù)MaxDT,將當前進化時刻設置為t=1,在定義空間Rn中隨機獲得N個粒子,組成初始粒子群,并設定粒子的初始位置與速度;
2)分別對每個粒子計算目標函數(shù)值來評價其適應值;
3)比較每個粒子當前適應值與迄今搜索到的個體歷史最優(yōu)值pi,如果優(yōu)于pi,則將其作為pi;
4)比較每個粒子當前適應值與群體歷史最優(yōu)值pg,如果優(yōu)于pg,則更新當前全局最優(yōu)值;
5)根據(jù)公式更新每個粒子的飛行速度和位置;
6)若滿足終止條件,則終止迭代,否則返回步驟2)。
終止條件為:
1)達到最大迭代次數(shù);
2)已獲得足夠好的適應值;
3)最優(yōu)解停滯不再變化。
4.2 基于粒子群算法的凸輪廓線重構
在圖5中,取t時刻凸輪廓線S2(t)上1 000個均布點坐標定義為(xti,yti),取t時刻凸輪廓線S1′(t)上1 000個均布點坐標定義為(mti,nti),對應點的歐式距離之和設為ρ(t),用以表征2個凸輪廓線的非對稱度。則有:
(22)
式中,i=1,2,…,1 000。
目標函數(shù):
Minρ(t)
(23)
邊界條件:
a+b+c=1
(24)
修正函數(shù):
(25)
利用粒子群算法對凸輪廓線進行重構求解,并用編程工具對以上數(shù)學模型編程計算,取粒子群的規(guī)模為100[24],設定最大迭代次數(shù)為5 000,依據(jù)經驗值范圍[18-20]和粒子收斂速度試算后,確定學習因子cp=0.05和cg=0.1。當?shù)螖?shù)超過1 800次后,最優(yōu)解停滯不動,獲得粒子收斂的群體行為在圖7中示出。
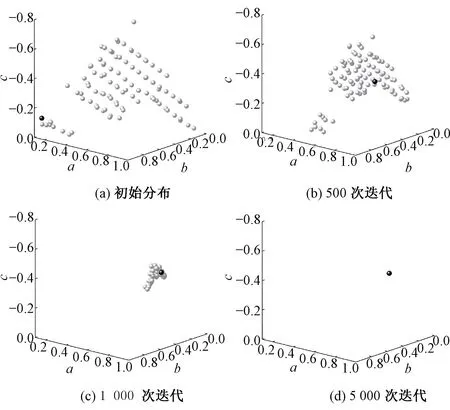
圖7 粒子收斂的群體行為Fig.7 Swam behavior of convergence. (a) Initial state;(b)500 iterations; (c) 1 000 iterations; (d) 5 000 iterations
圖7中黑色粒子為最優(yōu)粒子,示出了粒子初始分布情況、粒子經500次、1 000次和5 000次迭代后收斂情況。可以看到粒子收斂情況較好,同時得出修正系數(shù)與目標函數(shù)結果如表2所示。
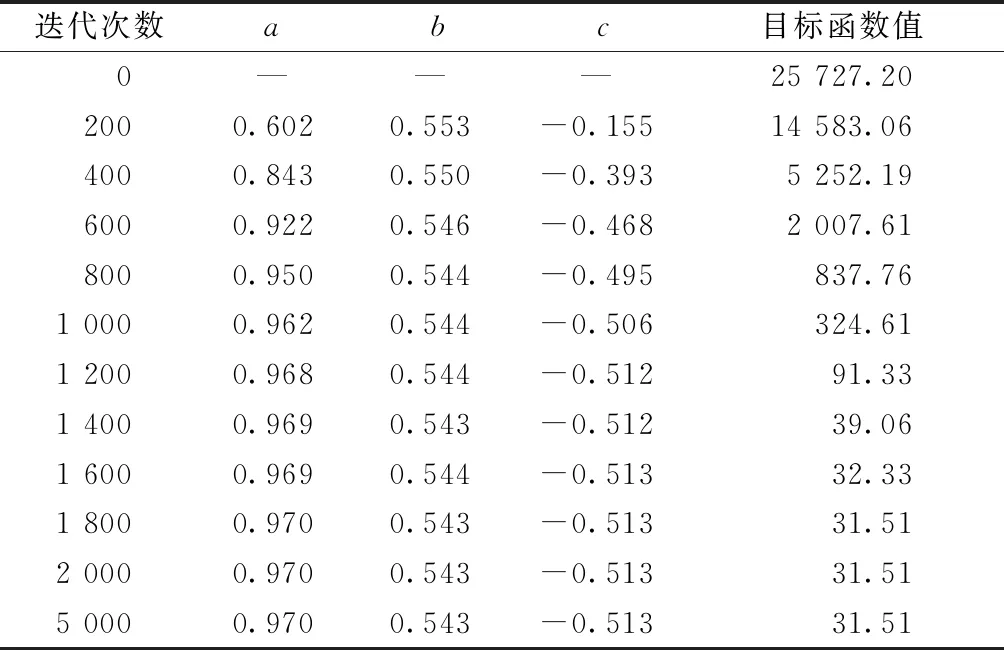
表2 修正系數(shù)與目標函數(shù)結果Tab.2 Correction factor and objective function result
結果表明,經優(yōu)化后獲得修正系數(shù):a=0.970,b=0.543,c=-0.513,目標函數(shù)值為31.51,得出重構后凸輪廓線。圖8示出重構前后凸輪廓線比較。廓線S1和S2是重構前獲得的凸輪廓線,廓線S3和S4為經過粒子群算法優(yōu)化重構后獲得的凸輪廓線。為了將重構前后的凸輪廓線進行對比,將廓線S1和S3沿O1點順時針旋轉180°形成廓線S1′與S3′,與廓線S2和S4比較,可以看到重構后的2個半段凸輪廓線S3和S4基本中心對稱,結果表明,經粒子群算法優(yōu)化重構后目標函數(shù)值由優(yōu)化前的25 727.20下降到31.51,使得凸輪廓線中心對稱度提高了99.878%。
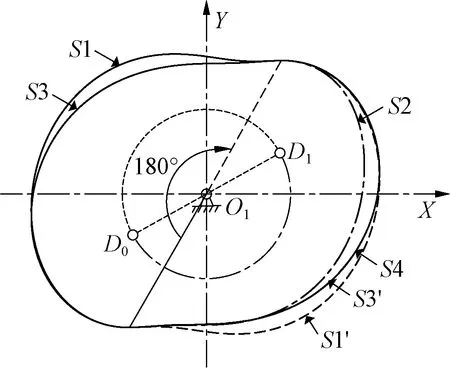
圖8 重構前后凸輪廓線比較Fig.8 Comparison of cam profiles before and after reconstruction
根據(jù)由廓線S3和S4形成的重構后廓線構建凸輪三維模型,將其安裝到提綜機構數(shù)字樣機中,運用仿真軟件進行運動仿真分析,獲得齒輪旋轉1個周期內綜框的運動特性。圖9示出綜框運動特性歸一化結果,同時示出測繪與重構凸輪產生的綜框運動特性比較。
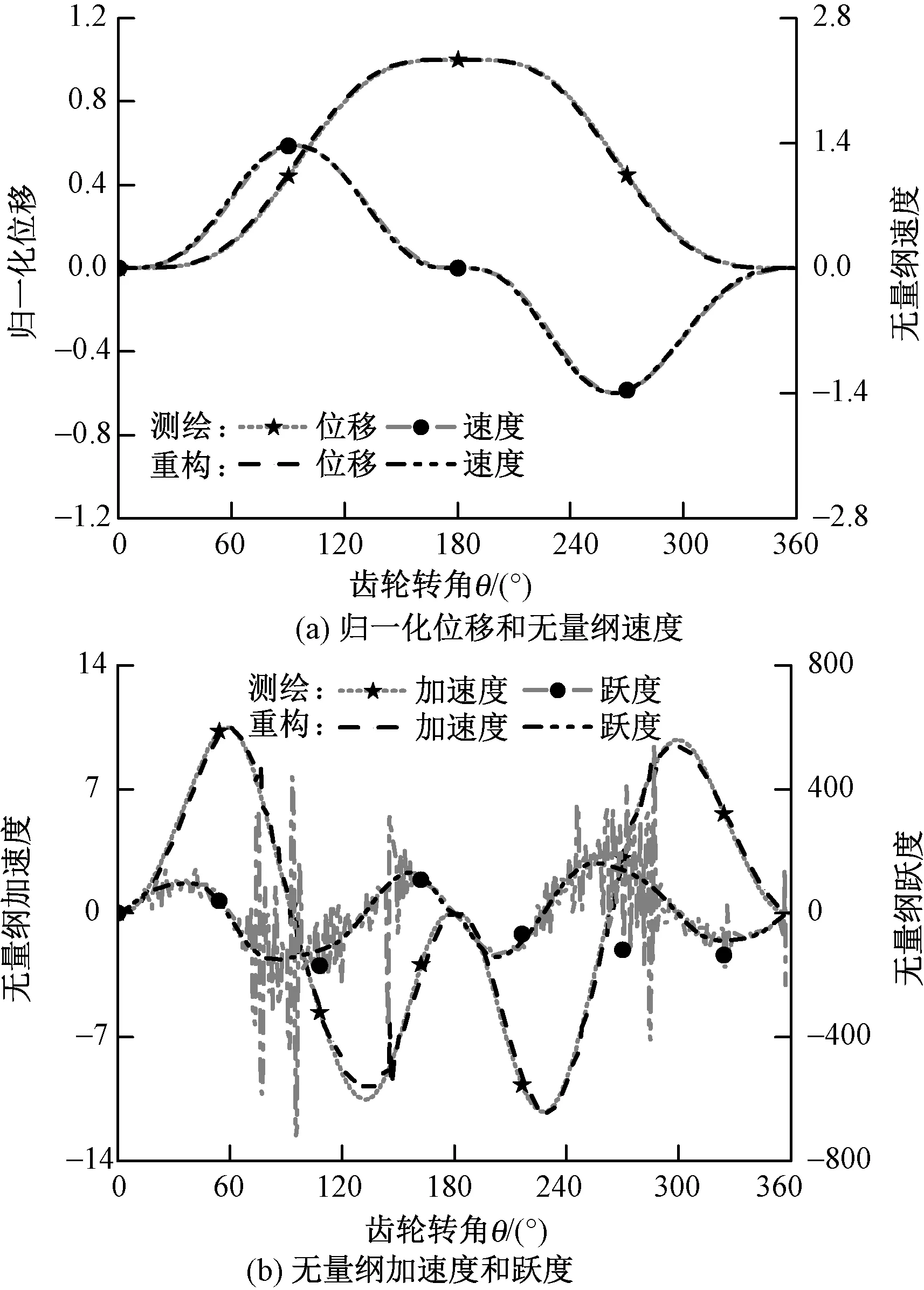
圖9 重構與測繪凸輪產生的綜框運動特性比較Fig.9 Comparison of heald frame motion characteristics generated by reconstruction and mapping cam. (a) Normalized displacement and dimensionless velocity; (b) Dimensionless acceleration and jerk
將優(yōu)化重構后凸輪產生的綜框運動特性與測繪凸輪產生的綜框運動特性比較分析,可看出:經過粒子群算法優(yōu)化重構后的凸輪產生的綜框運動特性在上升段和下降段相同,并且齒輪正反轉產生的綜框運動特性也相同。同時發(fā)現(xiàn)獲得的綜框運動特性平滑無波動,改善了測繪得到的凸輪廓線導致綜框運動特性在速度、加速度和躍度上存在的波動及跳躍現(xiàn)象。表明基于粒子群算法進行凸輪廓線重構,獲得的凸輪提高了多臂機整體運動學性能。
5 結 論
1)根據(jù)綜框運動特性的多項式數(shù)學表達,構建了求解多臂機旋轉變速機構凸輪廓線數(shù)學模型,列出了凸輪廓線求解方程,并用Microsoft Visual Studio VB.NET編程計算,獲得了求解后的凸輪廓線,建立了凸輪廓線逆向分析系統(tǒng)。運用SolidWorks仿真軟件建立了提綜機構的數(shù)字樣機模型,并將數(shù)值計算得到的凸輪廓線進行仿真分析,求解了綜框運動特性,分析了綜框運動特性的可靠性,驗證了所建逆向求解凸輪廓線數(shù)學模型的正確性。
2)由于偏心機構是曲柄搖桿機構,導致求解的凸輪廓線并非中心對稱。將求解獲得的非中心對稱凸輪廓線運用粒子群算法進行重構,獲得優(yōu)化重構后的凸輪廓線,使得凸輪廓線中心對稱度提高了99.878%,同時獲得修正后的綜框運動特性數(shù)學表達。
3)重構后的凸輪廓線滿足齒輪正反轉旋轉,綜框運動特性完全相同的要求,同時,使得綜框的位移、速度、加速度和躍度平滑無波動,改善了測繪得到的凸輪廓線導致綜框在速度、加速度和躍度上存在的明顯波動及跳躍現(xiàn)象,有效提升了多臂機的運動學性能。
