帶多約束的多彈分布式自適應(yīng)協(xié)同導(dǎo)引律
2021-01-05 10:32:34孫世巖田福慶梁偉閣
系統(tǒng)工程與電子技術(shù) 2021年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
孫世巖, 姜 尚, 田福慶, 梁偉閣
(1. 海軍工程大學(xué)兵器工程學(xué)院, 湖北 武漢 430033; 2. 海軍大連艦艇學(xué)院導(dǎo)彈與艦炮系, 遼寧 大連 116000)
0 引 言
隨著科學(xué)技術(shù)的日新月異與海戰(zhàn)思想的發(fā)展進(jìn)步,艦炮武器需要具備強(qiáng)大的海上火力突防與打擊能力[1]。借助網(wǎng)絡(luò)通信平臺(tái)將多枚艦炮制導(dǎo)彈藥網(wǎng)絡(luò)化,采用更加高效靈活的武器級(jí)協(xié)同,能夠突破戰(zhàn)役級(jí)協(xié)同,通過共享重要信息來協(xié)同打擊時(shí)間,并在對(duì)近岸機(jī)動(dòng)目標(biāo)實(shí)施精確打擊時(shí)滿足一定的攻擊角約束,具有較強(qiáng)的突防與打擊能力[2]。因此,在多智能體協(xié)同控制領(lǐng)域中,多彈協(xié)同導(dǎo)引律正逐步成為競(jìng)相關(guān)注的熱點(diǎn)問題[3]。
根據(jù)單元之間是否存在共享信息,協(xié)同模式主要可以分為開環(huán)式與閉環(huán)式。其中,開環(huán)式應(yīng)用了虛擬領(lǐng)彈[4]、偏置比例導(dǎo)引[5-6]、滑模控制(sliding mode control, SMC)[7]與動(dòng)態(tài)面控制[8]等方法,但需要預(yù)先設(shè)定命中時(shí)間,單元之間并不存在信息交互[9]。閉環(huán)式的通信拓?fù)漕愋椭饕惺絒10-12]與分布式[13-21]。針對(duì)靜止目標(biāo),張春妍[11]運(yùn)用導(dǎo)彈剩余飛行時(shí)間之差來計(jì)算比例系數(shù),提出了一種協(xié)同導(dǎo)引律,能夠同時(shí)滿足落角約束與時(shí)間約束。隨后,Zhao[12]提出了一種適用于攻擊機(jī)動(dòng)目標(biāo)的比例協(xié)同導(dǎo)引律。然而,集中式的劣勢(shì)主要體現(xiàn)為協(xié)同代價(jià)較高、系統(tǒng)魯棒性較差[13],考慮到在實(shí)戰(zhàn)中難以確保通信鏈路暢通,因此多彈協(xié)同作戰(zhàn)則更加適合采用分布式的通信拓?fù)洹?/p>
分布式運(yùn)用圖論中的Laplacian矩陣來描述網(wǎng)絡(luò)化彈藥間的拓?fù)渫ㄐ?其優(yōu)勢(shì)在于各作戰(zhàn)單元只與相鄰單元進(jìn)行信息共享,降低了通信代價(jià)。為了協(xié)同打擊靜止目標(biāo),Wang[14]提出了一種偏置比例協(xié)同導(dǎo)引律,以剩余飛行時(shí)間為協(xié)調(diào)變量,能夠滿足落角約束。為了避免控制量奇異,Cho[15]結(jié)合連續(xù)非線性函數(shù)提出了一種滑模協(xié)同導(dǎo)引律,使系統(tǒng)Lyapunov函數(shù)負(fù)半定。目標(biāo)機(jī)動(dòng)的不確定性是協(xié)同導(dǎo)引系統(tǒng)中的主要干擾源,現(xiàn)有文獻(xiàn)大多將其視為未知有界干擾。為了解決多彈協(xié)同攔截問題,孫雪嬌[16]提出了一種基于分布式協(xié)同控制理論的增廣比例導(dǎo)引律,其優(yōu)勢(shì)在于擴(kuò)展性強(qiáng)、通信量小。Lyu[17]基于齊次系統(tǒng)穩(wěn)定性理論和積分滑模控制理論,提出了一種新的無徑向速度測(cè)量的多導(dǎo)彈分布式協(xié)同制導(dǎo)律,保證了多枚導(dǎo)彈在有限時(shí)間內(nèi)的一致性,但上述文獻(xiàn)并未對(duì)不確定干擾采取有效的處理措施。
Han[18]首次提出了擴(kuò)張狀態(tài)觀測(cè)器(extended state observer, ESO),無需研究對(duì)象的精確模型,就能夠?qū)ο到y(tǒng)內(nèi)部狀態(tài)與外界干擾進(jìn)行迅速準(zhǔn)確的估計(jì)。針對(duì)多導(dǎo)彈協(xié)同系統(tǒng)中的不確定干擾與攻擊角約束,呂騰[19]、宋俊紅[20]采用ESO估計(jì)目標(biāo)法向加速度,并基于SMC設(shè)計(jì)了視線法向控制量。Zhang[21]基于SMC在視線方向設(shè)計(jì)了控制量,并采用了有限時(shí)間干擾觀測(cè)器,保證所有飛行器同時(shí)到達(dá)目標(biāo),對(duì)視線方向的干擾進(jìn)行補(bǔ)償,以實(shí)現(xiàn)更精確的攔截。但由于滑模切換項(xiàng)系數(shù)取值固定,且需要滿足一定的穩(wěn)定條件,容易誘發(fā)控制量高頻抖振。Guo[22]在SMC中,引入了連續(xù)的飽和函數(shù)來替代滑模切換項(xiàng),但這樣做的代價(jià)是使系統(tǒng)失去了SMC的不變性,難以從理論上分析系統(tǒng)穩(wěn)定性。為此,Jiang[23]運(yùn)用視線角速率與彈目距離信息設(shè)計(jì)模糊自適應(yīng)系統(tǒng)(fuzzy adaptive system, FAS)用以替代滑模切換項(xiàng),有效地削弱了控制量的高頻抖振,確保了系統(tǒng)一致最終有界(uniformly ultimately bounded, UUB)。
相較于導(dǎo)彈等非旋轉(zhuǎn)類飛行器,艦炮制導(dǎo)彈藥在制導(dǎo)過程中始終是旋轉(zhuǎn)的,這限制了視線角速率的精確測(cè)量,而且控制能力較弱[24]。因此,多導(dǎo)彈協(xié)同的研究成果并不能直接照搬應(yīng)用,本文綜合考慮了上述因素,基于協(xié)同一致性理論與Lyapunov穩(wěn)定性理論,提出了一種分布式模糊自適應(yīng)協(xié)同導(dǎo)引律(distributed fuzzy adaptive cooperative guidance law, DFACGL),主要?jiǎng)?chuàng)新點(diǎn)為:① 設(shè)計(jì)ESO準(zhǔn)確迅速地觀測(cè)出視線切向、法向與側(cè)向上的干擾以及視線角速率,觀測(cè)誤差能夠迅速地收斂至零點(diǎn)附近任意小的鄰域內(nèi);② 在視線切向,采用積分滑模設(shè)計(jì)分布式協(xié)同控制量,使命中時(shí)刻在有限時(shí)間內(nèi)趨于一致,在視線法向與側(cè)向,結(jié)合彈目距離與接近速率設(shè)計(jì)非奇異終端滑模(nonsingular terminal sliding mode, NTSM)的自適應(yīng)指數(shù)趨近律,使終端視線角跟蹤誤差與視線角速率在有限時(shí)間內(nèi)收斂至零;③ 采用積分滑模與NTSM作為FAS的輸入變量,用以替代滑模切換項(xiàng),既消除了控制量的高頻抖振,又保證了系統(tǒng)UUB。
1 模型建立
1.1 彈目三維相對(duì)運(yùn)動(dòng)模型


圖1 彈目三維相對(duì)運(yùn)動(dòng)關(guān)系
為了便于分析討論,作合理假設(shè)[26]如下:
彈目相對(duì)運(yùn)動(dòng)關(guān)系為
(1)
(2)
(3)
1.2 近岸機(jī)動(dòng)目標(biāo)模型
近岸機(jī)動(dòng)目標(biāo)由一階慣性環(huán)節(jié)描述:
(4)


1.3 攻擊角模型
攻擊角θEi的定義為:在彈體命中目標(biāo)時(shí),Pi與T的速度矢量之間的夾角。在俯仰縱平面上,攻擊角模型如圖2所示。

圖2 攻擊角模型
θPfi、θQ fi和θTf分別表示θPi、θQi和θT在命中時(shí)刻的終端角度值。通過零化碰撞航線上彈目相對(duì)法向速度可得
(5)
1.4 系統(tǒng)狀態(tài)空間模型

(6)
2 分布式模糊自適應(yīng)協(xié)同導(dǎo)引律設(shè)計(jì)
2.1 擴(kuò)張狀態(tài)觀測(cè)器設(shè)計(jì)
針對(duì)式(6),在視線切向,定義觀測(cè)變量為zx1i、zx2i、zdγi,定義觀測(cè)誤差為eγ1i=zx1i-x1i、eγ2i=zx2i-x2i、eγ3i=zdγi-dγi,構(gòu)建三階ESO為
(7)
式中,0<βγ i(i=1,2,3);0<σγ i<1(i=1,2);0<ηγ i(i=1,2);非線性增益函數(shù)fal為
(8)
根據(jù)文獻(xiàn)[26]可知,無論干擾項(xiàng)dγi是否連續(xù),只需要通過選擇合適的參數(shù),尤其是令βγ3遠(yuǎn)大于βγ1和βγ2,就能夠使觀測(cè)誤差迅速地收斂至平衡點(diǎn)附近充分小的鄰域內(nèi)。
(9)
(10)
式中,各參數(shù)的定義與取值范圍,以及函數(shù)形式同理于式(7)。
2.2 視線方向控制量設(shè)計(jì)
網(wǎng)絡(luò)化彈藥的通信拓?fù)潢P(guān)系可以用無向圖G=(P,ζ,A)來描述,P為制導(dǎo)彈藥Pi的集合,ζ為Pi之間的連線,A=[aij]∈Rn×n為權(quán)重系數(shù)矩陣,若Pi與Pj之間存在著信息共享,則有aij=1,否則aij=0。由于G無向,則aij=aji。如果G中的任意兩個(gè)節(jié)點(diǎn)之間都存在著至少一條通路,那么稱G是連通的。
運(yùn)用積分滑模設(shè)計(jì)視線方向控制量uγi為
(11)
(12)
(13)
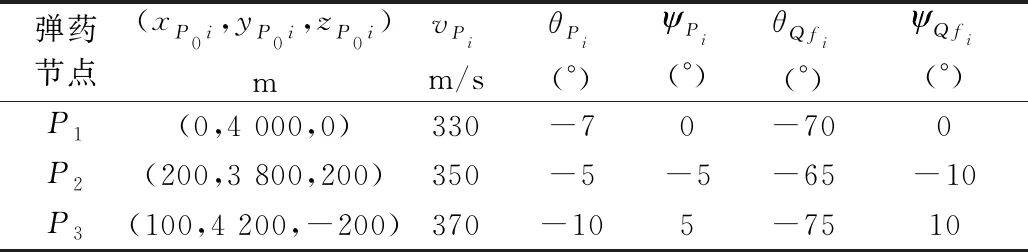
式中,0 定理 1在系統(tǒng)(6)的視線切向,G無向連通,設(shè)計(jì)式(7)、式(11)~式(13),能夠使x1i和x2i在有限時(shí)間內(nèi)各自趨于一致。 證明為了使積分滑模具備較好的動(dòng)態(tài)品質(zhì),設(shè)計(jì)指數(shù)趨近律為 (14) 對(duì)式(12)進(jìn)行微分,聯(lián)立式(6)和式(13)可得 (15) (16) 引理 1考慮如下系統(tǒng)[28]: (17) [c(1-α)]。 根據(jù)引理1,sγi能夠在有限時(shí)間內(nèi)收斂至0,在此之后,對(duì)式(12)進(jìn)行微分,聯(lián)立式(11)和式(13),經(jīng)過進(jìn)一步地推導(dǎo)可得 (18) (19) 引理 2考慮如下二階多智能體系統(tǒng)[29]: (20) 式中,qi∈R3、wi∈R3、ui∈R3分別代表了智能體i的位置、速度、加速度矢量,當(dāng)通信拓?fù)錈o向連通,并且采用具有如下形式的控制量時(shí),系統(tǒng)狀態(tài)qi、wi能夠各自在有限時(shí)間內(nèi)一致性收斂。 (21) 證畢 為避免滑模奇異,選用一種NTSM為 sθ i=x3i+ρθ|x4i|φθsign(x4i),1<φθ<2,0<ρθ (22) 對(duì)式(22)求導(dǎo)可得 (23) 選取滑模自適應(yīng)趨近律為 (24) 式中,max{|eθ3i|}≤kθ;0 (25) 定理 2在式(6)的視線法向,設(shè)計(jì)式(9)與式(25),x3i和x4i可以在有限時(shí)間內(nèi)收斂至0。 (26) 由引理1可知,NTSMsθ i能夠在有限時(shí)間內(nèi)收斂至0,在此之后經(jīng)過推導(dǎo)可得 (27) (28) 根據(jù)引理1可知,狀態(tài)變量x3i和x4i能夠在有限時(shí)間內(nèi)收斂至0。 證畢 視線側(cè)向控制量的設(shè)計(jì)思路與視線法向相同,參照式(22)~式(28),設(shè)計(jì)為 (29) (30) Ξ(w|k)=Bl1,l2,…,lh,lj=1,2,…,pi (31) (32) (33) 定義最優(yōu)逼近向量為 (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) 定理 3對(duì)于式(6),采用式(7)、式(9)、式(10),式(41)~式(42),式(43)~式(45),通過選擇合適的參數(shù),則能夠保證閉環(huán)系統(tǒng)UUB,并且使?fàn)顟B(tài)變量快速穩(wěn)定地收斂至平衡點(diǎn)附近充分小的鄰域內(nèi)。 證明選取全系統(tǒng)Lyapunov函數(shù)為 (46) (47) (48) 聯(lián)立式(47)和式(48),對(duì)式(46)進(jìn)行微分: (49) 為了保證系統(tǒng)穩(wěn)定,在選取參數(shù)時(shí)需要滿足以下條件: (50) 令φ=min{mbi}(b=1,2,…,6),式(43)化簡(jiǎn)為 (51) (52) 式中,C為任意常數(shù)。將式(51)不等號(hào)的兩端同時(shí)進(jìn)行積分運(yùn)算,可得如下不等式: (53) 進(jìn)一步推導(dǎo),可以得到: (54) 盡管式(50)給出了保證系統(tǒng)穩(wěn)定性的參數(shù)選取范圍,但由于受到多方面因素的約束,例如,在提高系統(tǒng)收斂速度的同時(shí),實(shí)際過載很容易超過可用過載。因而,給出參數(shù)的定量選擇標(biāo)準(zhǔn)比較困難,目前常采用的方法是綜合考慮設(shè)計(jì)方法與實(shí)際物理環(huán)境,再通過大量的數(shù)學(xué)仿真來進(jìn)行定量選擇。 為了驗(yàn)證DFACGL的有效性,組網(wǎng)3枚彈藥,在表1~表3中設(shè)定彈藥、目標(biāo)與制導(dǎo)律的參數(shù),圖3為通信拓?fù)?分別在目標(biāo)作圓弧機(jī)動(dòng)與蛇形機(jī)動(dòng)的工況下,進(jìn)行協(xié)同打擊仿真實(shí)驗(yàn),并以SMCGL作為對(duì)比。受篇幅所限,僅展示部分仿真結(jié)果。 為了體現(xiàn)DFACGL無需視線角速率信息,在式(44)和式(45)中使用zx4i和zx6i。設(shè)定導(dǎo)引盲區(qū)為50 m,盲區(qū)內(nèi)控制量不再變化,保持進(jìn)盲區(qū)時(shí)刻控制量,彈藥依靠慣性飛行。 表1 網(wǎng)絡(luò)化彈藥初始參數(shù) 表2 目標(biāo)初始參數(shù) 表3 導(dǎo)引律參數(shù) 圖3 通信拓?fù)?/p> (55) 式中,li=1,2,…,9;i=1,2,…,n。 圖4 工況1仿真實(shí)驗(yàn)曲線 表4 工況1的仿真實(shí)驗(yàn)結(jié)果 表5 工況2的仿真實(shí)驗(yàn)結(jié)果 圖5 工況2仿真實(shí)驗(yàn)曲線 針對(duì)網(wǎng)絡(luò)化制導(dǎo)彈藥在打擊近岸機(jī)動(dòng)目標(biāo)的末制導(dǎo)段,考慮攻擊角約束與視線角速率測(cè)量受限,基于協(xié)同一致性理論與有限時(shí)間穩(wěn)定性理論,設(shè)計(jì)了DFACGL,主要從建立模型、系統(tǒng)穩(wěn)定性分析、仿真實(shí)驗(yàn)3個(gè)方面展開了研究,現(xiàn)總結(jié)全文如下: (1) 設(shè)計(jì)ESO準(zhǔn)確迅速地估計(jì)出視線切向、法向與側(cè)向的不確定干擾以及視線角速率,為協(xié)同導(dǎo)引提供所需的必要信息; (2) 運(yùn)用積分滑模設(shè)計(jì)了視線切向分布式協(xié)同控制量,使命中時(shí)刻在有限時(shí)間內(nèi)趨于一致,運(yùn)用NTSM設(shè)計(jì)了視線法向與側(cè)向控制量,令終端視線角跟蹤誤差與視線角速率在有限時(shí)間內(nèi)收斂至0; (3) 設(shè)計(jì)模糊自適應(yīng)系統(tǒng)不僅有效削弱了控制量高頻抖振,還確保了系統(tǒng)UUB,所需信息可通過現(xiàn)有技術(shù)途徑獲取,具有一定的理論意義與應(yīng)用價(jià)值。


2.3 視線法向控制量設(shè)計(jì)


2.4 視線側(cè)向控制量設(shè)計(jì)
2.5 FAS設(shè)計(jì)




3 穩(wěn)定性分析



4 仿真實(shí)驗(yàn)



4.1 工況1:圓弧機(jī)動(dòng)目標(biāo)



4.2 工況2:蛇形機(jī)動(dòng)目標(biāo)



5 結(jié) 論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測(cè)繪(2020年12期)2020-12-29 01:33:58現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42流行色(2020年1期)2020-04-28 11:16:38裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45海峽姐妹(2017年7期)2017-07-31 19:08:17