方便輪椅通行的液壓臺(tái)階的設(shè)計(jì)
2021-01-06 02:27:26德州學(xué)院機(jī)電工程學(xué)院胡財(cái)榮王志坤
河北農(nóng)機(jī) 2020年12期
關(guān)鍵詞:智能設(shè)計(jì)
德州學(xué)院機(jī)電工程學(xué)院 胡財(cái)榮 王志坤
1 引言
1.1 選題的背景
隨著社會(huì)發(fā)展,我國社會(huì)開始步入老齡化階段,許多老年人無法自主地外出活動(dòng),并且由于科技的發(fā)展和交通的進(jìn)步,各種意外事故也頻頻發(fā)生,這也造成下肢殘障人士的數(shù)量也急劇增加。這些老年人和殘障人士必須借助輪椅才可以進(jìn)行日常出行,但是實(shí)際生活中的很多公共場(chǎng)所及建筑由于自身設(shè)計(jì)的要求會(huì)有許多臺(tái)階的存在,這些臺(tái)階對(duì)于乘坐輪椅出行的老年人及殘障人士是很大障礙,在沒有外力的幫助下很難通過,嚴(yán)重降低了乘坐輪椅人士的出行體驗(yàn)。
1.2 選題的目的和意義
現(xiàn)在國內(nèi)外很多高校都投入很多資金研究智能爬樓輪椅,其基本功能已經(jīng)實(shí)現(xiàn)但技術(shù)并沒有很成熟,實(shí)際爬樓過程具有很多不確定因素甚至導(dǎo)致危險(xiǎn),且價(jià)格昂貴普通家庭無法承受,在日常的生活中并沒有普及。當(dāng)然許多有臺(tái)階的公共場(chǎng)所也都設(shè)有斜坡式的無障礙通道,許多老年人因身體因素,上坡也是極為消耗體力的事情,并且對(duì)于體弱或者患有心臟疾病的老年人有可能引發(fā)意外事故。本設(shè)計(jì)就是設(shè)計(jì)出一種針對(duì)公共場(chǎng)所不太高的臺(tái)階,通過簡(jiǎn)易的控制操作來實(shí)現(xiàn)輪椅無障礙通行的智能液壓臺(tái)階,此智能液壓臺(tái)階的設(shè)計(jì)可以解決乘坐輪椅出行人士遇到臺(tái)階無法通過的問題,極大地便利了乘坐輪椅出行的人士。
2 液壓臺(tái)階的工作原理及功能
本智能液壓臺(tái)階由整體框架、液壓推桿、PLC 控制系統(tǒng)、距離傳感器、壓力傳感器以及控制面板組成。其特點(diǎn)在于可以方便輪椅通過臺(tái)階。該智能液壓臺(tái)階工作時(shí),當(dāng)有人乘輪椅需要上臺(tái)階,按下設(shè)立于臺(tái)階底部控制柱上控制面板的上行按鍵后,智能液壓臺(tái)階進(jìn)入工作模式,PLC 控制器接收到控制面板發(fā)出的上行信息。PLC 控制器經(jīng)過信息處理后,對(duì)液壓推桿發(fā)出指令信號(hào),在距離感應(yīng)系統(tǒng)的反饋下,臺(tái)階下所有的液壓推桿進(jìn)行收回,臺(tái)階平面降至與地面平齊以達(dá)到輪椅駛?cè)氲臈l件,然后輪椅駛?cè)搿]喴务側(cè)牒笈_(tái)階下壓力傳感器產(chǎn)生壓力信號(hào)證明輪椅已經(jīng)駛?cè)耄瑪?shù)據(jù)傳輸?shù)絇LC 控制器進(jìn)行處理,待數(shù)據(jù)值穩(wěn)定之后PLC 控制器向液壓推桿發(fā)出上行指令,液壓推桿接收指令后同時(shí)推出,由距離感應(yīng)系統(tǒng)感應(yīng)行程并由PLC 控制器進(jìn)行數(shù)據(jù)處理以達(dá)到所有臺(tái)階面同步上升的效果,到達(dá)臺(tái)階頂部后輪椅駛出,壓力傳感器數(shù)據(jù)信號(hào)值恢復(fù)正常,經(jīng)PLC 控制器數(shù)據(jù)處理后,給液壓推桿發(fā)出收回指令,在距離感應(yīng)系統(tǒng)的輔助下,液壓臺(tái)階恢復(fù)臺(tái)階狀,進(jìn)入休眠模式從而不影響正常行人通行。若需要下行,則過程與之相反。
3 硬件結(jié)構(gòu)設(shè)計(jì)及工作過程
3.1 硬件結(jié)構(gòu)設(shè)計(jì)
以三臺(tái)階式智能液壓臺(tái)階為例,整體內(nèi)部設(shè)計(jì)如圖1 所示。智能液壓臺(tái)階由多個(gè)升降模組以及一個(gè)PLC 控制器組成,圖1固定板上包括六個(gè)升降模組以及一個(gè)PLC 控制器。每個(gè)升降模組又包括液壓推桿、距離感應(yīng)器及壓力傳感器;液壓推桿用于升降臺(tái)階的動(dòng)作,距離傳感器用來反饋升降的位置數(shù)據(jù),壓力傳感器用來感應(yīng)臺(tái)階上是否有輪椅存在,其中左右兩個(gè)升降模組為一組,控制一個(gè)液壓臺(tái)階的上下運(yùn)動(dòng),左右雙升降模組的設(shè)計(jì)可以提高其推力并保障其運(yùn)行的穩(wěn)定性。
距離傳感器是通過發(fā)射能量波束并被被測(cè)物體反射,通過計(jì)算波束發(fā)射到被物體反射回來的時(shí)間來計(jì)算與物體之間的距離。常用的能量波束有超聲波、激光、紅外光等。本設(shè)計(jì)采用紅外測(cè)距傳感器,該傳感器有同步輸入端,外形小便于安裝,易于操作,且可以多傳感器同步測(cè)量能實(shí)現(xiàn)每個(gè)臺(tái)階升降位置的準(zhǔn)確。
壓力傳感器位于液壓推桿的頂部,采用壓電式壓力傳感器,該傳感器體積小、動(dòng)態(tài)特性比較好。
推桿采用電動(dòng)液壓推桿,該推桿不需要任何附屬設(shè)施便可以帶負(fù)荷啟動(dòng),適用于推拉直線運(yùn)動(dòng)且具有負(fù)荷保護(hù)能力相同推力速度情況下,消耗電能僅有電動(dòng)推桿的一半。其帶負(fù)荷啟動(dòng)且節(jié)能的特性可有效適用于本設(shè)計(jì)工作環(huán)境。選型安裝完畢后,我們將傳感器與電動(dòng)液壓推桿與PLC 控制器建立連接從而成為一個(gè)完整的系統(tǒng)。
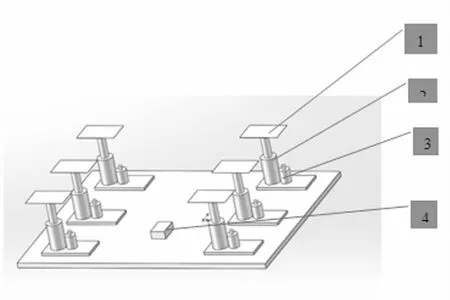
圖1
3.2 工作過程示意圖
以有人需要上行為例,其工作過程示意圖如圖2 所示。在休眠狀態(tài)下,為臺(tái)階的模式,行人正常通行,當(dāng)有人按下控制柱的上行按鍵后,進(jìn)入工作模式,臺(tái)階所有的液壓推桿收回,在距離感應(yīng)器的數(shù)據(jù)反饋下,臺(tái)階平面降至與地面平齊,然后輪椅駛?cè)耄笏幸簤和茥U同時(shí)工作推出,由距離感應(yīng)系統(tǒng)感應(yīng)行程,到達(dá)頂部后輪椅駛出,壓力傳感器數(shù)值恢復(fù)正常,控制器給出指令液壓臺(tái)階恢復(fù)臺(tái)階狀。
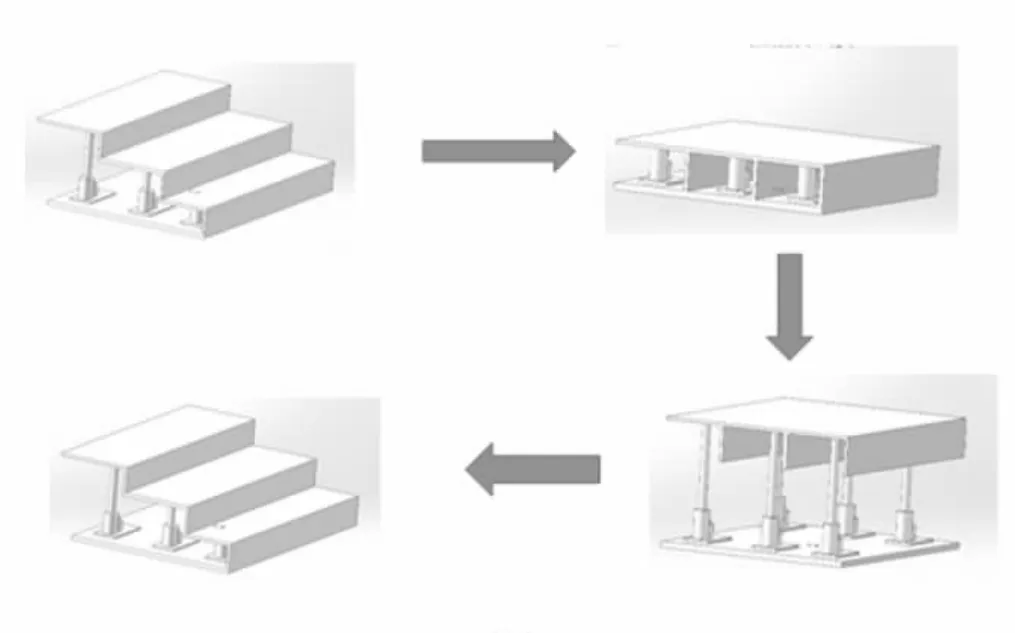
圖2
4 結(jié)語
該智能液壓升降臺(tái)階有效解決了老年人及殘障人士乘坐輪椅出行,遇到臺(tái)階不方便通過的問題,為乘坐輪椅出行的人士提供了便利,未來可以在公共場(chǎng)所進(jìn)行廣泛推廣,有廣闊的市場(chǎng)前景。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
