無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)評(píng)價(jià)技術(shù)綜述
2021-01-06 12:48:25杜梓冰陳銀娣
航空兵器 2021年6期
關(guān)鍵詞:無(wú)人機(jī)人工智能
杜梓冰 陳銀娣



摘 要:為有效開(kāi)展智能無(wú)人機(jī)自主作戰(zhàn)能力的試驗(yàn)與評(píng)估, 本文對(duì)自主能力進(jìn)行試驗(yàn)及評(píng)價(jià)的緊迫性和所屬技術(shù)范疇進(jìn)行了研究, 探討美國(guó)在政策、 計(jì)劃、 技術(shù)等方面的做法, 同時(shí)深入剖析當(dāng)前典型自主等級(jí)評(píng)價(jià)模型在飛行試驗(yàn)中的適用性, 并分析了重塑試驗(yàn)評(píng)估模式、 建設(shè)高智能對(duì)抗試驗(yàn)環(huán)境、 建立試驗(yàn)評(píng)估技術(shù)體系、 形成自主性等級(jí)標(biāo)準(zhǔn)、 建設(shè)通用模型和工具、 試驗(yàn)評(píng)估中應(yīng)用人工智能等主要方向的研究?jī)?nèi)容, 提出了頂層重視規(guī)劃試驗(yàn)評(píng)估、 加大人工智能技術(shù)應(yīng)用、 加大通用模型構(gòu)建和發(fā)展虛實(shí)一體試驗(yàn)等建議, 以期提升自主性技術(shù)落地應(yīng)用速度, 擴(kuò)大智能無(wú)人機(jī)作戰(zhàn)使用范圍。
關(guān)鍵詞:???? 軍事智能; 人工智能; 無(wú)人機(jī); 自主作戰(zhàn)能力; 試驗(yàn)與評(píng)價(jià); 自主等級(jí); 虛實(shí)一體試驗(yàn)
中圖分類(lèi)號(hào):???? TJ760; V217; V279 文獻(xiàn)標(biāo)識(shí)碼:??? A 文章編號(hào):???? 1673-5048(2021)06-0058-08
0 引? 言
隨著人工智能技術(shù)在軍事領(lǐng)域的快速發(fā)展和應(yīng)用, 軍事領(lǐng)域?qū)⒂瓉?lái)一場(chǎng)變革, 從機(jī)械化、 信息化走向智能化, 未來(lái)戰(zhàn)爭(zhēng)將是智能化的戰(zhàn)爭(zhēng), 而無(wú)人化是其基本形態(tài), 人工智能與相關(guān)技術(shù)的融合發(fā)展將逐步把這種形態(tài)推向高級(jí)階段, 航空裝備領(lǐng)域的無(wú)人機(jī)系統(tǒng)自主水平將大大提高[1-9], 甚至是五代機(jī)的一種可能形式[2]。 美軍認(rèn)為, 人工智能與無(wú)人系統(tǒng)融合為無(wú)人自主系統(tǒng), 是改變戰(zhàn)場(chǎng)規(guī)則的顛覆性技術(shù), 基于此, 美軍近年來(lái)提出了“忠誠(chéng)僚機(jī)”“分布式作戰(zhàn)”“全域作戰(zhàn)”“蜂群”“馬賽克戰(zhàn)”等顛覆性作戰(zhàn)概念, 將自主性無(wú)人機(jī)作為其關(guān)鍵部分, 進(jìn)行了大量演示驗(yàn)證試飛, 驗(yàn)證了其技術(shù)的先進(jìn)和戰(zhàn)略?xún)?yōu)勢(shì)的維持[8]。 自主性是人工智能技術(shù)在軍事領(lǐng)域深度應(yīng)用的結(jié)晶, 可解釋性、 自主性能力、 信任度、 魯棒性、 人機(jī)權(quán)限、 人機(jī)編組效能、 集群效能等是影響無(wú)人機(jī)系統(tǒng)投入使用的主要問(wèn)題。 科學(xué)、 全面、 先進(jìn)的試驗(yàn)、 評(píng)估、 驗(yàn)證和確認(rèn)(TEVV)技術(shù)是解決這些問(wèn)題的關(guān)鍵[10-11], 但自主感知、 自主規(guī)劃、 自主學(xué)習(xí)、 自主協(xié)同、 自主決策、 自主攻擊等行為的試驗(yàn)評(píng)估超出了現(xiàn)有試驗(yàn)技術(shù)的范疇和模式, 其多學(xué)科交叉性、 不可理解性、 不可預(yù)測(cè)性等特征對(duì)現(xiàn)有試驗(yàn)與評(píng)估方法帶來(lái)了巨大的挑戰(zhàn), 亟需開(kāi)展新的試驗(yàn)與評(píng)估方法研究[11-12]。
美國(guó)自21世紀(jì)初開(kāi)始出臺(tái)大量政策文件支持自主能力的試驗(yàn)項(xiàng)目[11-17], 形成了多種自主能力評(píng)價(jià)模型[1,2,18-28], 國(guó)內(nèi)楊偉[1]、 盧新來(lái)等[6]、 劉樹(shù)光等[26]、 Wang等[27]也對(duì)相關(guān)理論進(jìn)行了研究, 但未形成統(tǒng)一的標(biāo)準(zhǔn), 而且也不完全適用于外場(chǎng)試驗(yàn)評(píng)估。
為確保軍事智能技術(shù)落地應(yīng)用, 擴(kuò)大自主性無(wú)人機(jī)的應(yīng)用場(chǎng)景, 需要超前研究相關(guān)的試驗(yàn)評(píng)估技術(shù)體系, 為此, 研究美國(guó)在自主能力試驗(yàn)方面的做法和相關(guān)評(píng)價(jià)模型在試驗(yàn)中的適用性, 分析自主作戰(zhàn)能力對(duì)試驗(yàn)與評(píng)估的挑戰(zhàn), 并給出自主作戰(zhàn)試驗(yàn)與評(píng)估發(fā)展建議, 以期促進(jìn)國(guó)內(nèi)相關(guān)技術(shù)的發(fā)展。
1 無(wú)人機(jī)系統(tǒng)自主作戰(zhàn)能力試驗(yàn)評(píng)價(jià)的基本問(wèn)題
1.1 無(wú)人機(jī)自主性的內(nèi)涵
關(guān)于自主性的定義有多種, 對(duì)于無(wú)人機(jī)而言, 美國(guó)空軍2015年發(fā)布的《自主地平線》[3]的定義比較恰當(dāng): 自主性是融合智能系統(tǒng)功能, 使用更多的傳感器和復(fù)雜軟件,? 在廣泛的作戰(zhàn)挑戰(zhàn)下、 復(fù)雜環(huán)境因素和多樣的任務(wù)中, 能夠響應(yīng)設(shè)計(jì)中未編程或未預(yù)期的情況(即基于決策的響應(yīng)), 具有一定程度的自治和自我指導(dǎo)的行為。 自主性被認(rèn)為是自動(dòng)化的重要擴(kuò)展, 可在未完全預(yù)期的情況下成功執(zhí)行非常高級(jí)的任務(wù)指令。 其特征在于, 能夠在極其不確定的情況下, 獨(dú)立實(shí)現(xiàn)任務(wù)目標(biāo), 且在很長(zhǎng)時(shí)間內(nèi)表現(xiàn)良好, 還能在通信受限或無(wú)通信情況下彌補(bǔ)系統(tǒng)故障帶來(lái)的影響[3]。
1.2 無(wú)人機(jī)自主性能力發(fā)展的需求
美國(guó)國(guó)防科學(xué)委員會(huì)2012年發(fā)布的《自主性在國(guó)防部無(wú)人系統(tǒng)中的地位》指出, 自主能力是美國(guó)無(wú)人系統(tǒng)的核心能力。 美國(guó)《無(wú)人系統(tǒng)綜合路線圖(2017-2042)》提出,“互操作性、 自主性、 網(wǎng)絡(luò)安全以及人機(jī)協(xié)同”是未來(lái)無(wú)人系統(tǒng)發(fā)展的四個(gè)關(guān)鍵技術(shù)和驅(qū)動(dòng)。 作戰(zhàn)需求是技術(shù)發(fā)展的牽引力, 在自主性方面, 通過(guò)提高操作速度、 降低認(rèn)知負(fù)荷以及提高逆境中性能的方式提高自主性能力。
“人在環(huán)路”受制于人的固有限制, 需要提高機(jī)器的自主性以解放人力。 由于軍事、 政治和倫理的限制, 當(dāng)前“捕食者”等無(wú)人機(jī)仍然是“人在環(huán)路”, 在目標(biāo)偵察確認(rèn)、 武器打擊等環(huán)節(jié)仍然需要人的介入, 而操控員固有的生理限制影響作戰(zhàn)效果, 人員處理容量和速度有限, 影響作戰(zhàn)效能, 有限空間多人協(xié)同操作高壓下易出錯(cuò), 合格人員成長(zhǎng)速度落后于裝備發(fā)展速度, 通過(guò)自主性的提升, 減少人員干預(yù)環(huán)節(jié)、 減少人員操作負(fù)荷, 可以一定程度上避免人的因素影響作戰(zhàn)效能。
戰(zhàn)場(chǎng)的博弈對(duì)抗需要提升無(wú)人平臺(tái)的自主性。 隨著人工智能技術(shù)在軍事領(lǐng)域的快速應(yīng)用, 未來(lái)戰(zhàn)場(chǎng)的復(fù)雜性、 博弈動(dòng)態(tài)性和不確定性都給有人和無(wú)人系統(tǒng)執(zhí)行OODA作戰(zhàn)環(huán)路帶來(lái)了極大的挑戰(zhàn), 必須提高無(wú)人系統(tǒng)的自主性, 以擴(kuò)大系統(tǒng)的處理能力。 集群作戰(zhàn)必須提高無(wú)人系統(tǒng)的自主性。 “蜂群”“狼群”“魚(yú)群”等集群模式下, 作戰(zhàn)的無(wú)人系統(tǒng)數(shù)量眾多, 但是受制于人的因素, 一個(gè)人能操作控制的無(wú)人機(jī)有限, 鏈路資源和地面站資源難以支撐, 勢(shì)必要求提高無(wú)人系統(tǒng)自主性。
1.3 無(wú)人機(jī)自主作戰(zhàn)的特征與影響
智能化作戰(zhàn)不再是能量的逐步釋放和作戰(zhàn)效果的線性疊加, 而是非線性、 涌現(xiàn)性、 自生長(zhǎng)等多種效應(yīng)的急劇放大和結(jié)果的快速收斂, 逐步具備自適應(yīng)、 自學(xué)習(xí)、 自對(duì)抗、 自修復(fù)、 自演進(jìn)、 博弈對(duì)抗等特征。 基于人工智能技術(shù)的新一代無(wú)人機(jī)自主作戰(zhàn)系統(tǒng), 無(wú)人機(jī)平臺(tái)、 探測(cè)、 識(shí)別、 決策、 跟蹤、 打擊等環(huán)節(jié)自主作戰(zhàn), 能夠模擬人的思維和行為, 促進(jìn)制勝機(jī)理從“制信息權(quán)”變?yōu)椤爸浦菣?quán)”。
1.4 試驗(yàn)與評(píng)估的必要性和迫切性
正如美國(guó)海軍分析中心2017年在《人工智能、 機(jī)器人和蜂群》所言[13], 自主性武器帶來(lái)了一系列倫理與道德問(wèn)題, 如“能否區(qū)分軍事目標(biāo)與平民?”“如何將主觀道德變?yōu)榇a”。 牛津大學(xué)等機(jī)構(gòu)研究認(rèn)為, 人工智能的使用將加劇實(shí)體及數(shù)字安全系統(tǒng)面臨的威脅, 并產(chǎn)生全新的威脅[14], 因此, 國(guó)際上一直呼吁禁止開(kāi)發(fā)具有攻擊性的自主武器。 如美國(guó)2005年的電影《絕密飛行》中, 智能無(wú)人機(jī)能拒絕人工指令、 自行選擇別國(guó)目標(biāo)進(jìn)行攻擊等, 這在現(xiàn)實(shí)中將帶來(lái)巨大的政治風(fēng)險(xiǎn), 其他諸多科幻小說(shuō)、 電影中也展示出無(wú)人機(jī)自主化將帶來(lái)一系列的倫理、 道德、 文化、 人權(quán)和軍事風(fēng)險(xiǎn), 因此世界各國(guó)都對(duì)自主無(wú)人機(jī)的作戰(zhàn)使用持懷疑態(tài)度。 這也帶來(lái)一個(gè)矛盾, 一方面沒(méi)有人會(huì)拒絕人工智能技術(shù)在軍用無(wú)人機(jī)領(lǐng)域的應(yīng)用, 但同時(shí)又帶來(lái)各方面巨大的風(fēng)險(xiǎn), 科學(xué)、 充分、 有效的試驗(yàn)與評(píng)估是緩解這個(gè)問(wèn)題的有效途徑, 智能無(wú)人機(jī)系統(tǒng)比以往任何航空裝備都更需要充足的試驗(yàn)與評(píng)估。
1.5 智能無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)與評(píng)估范疇
智能無(wú)人系統(tǒng)的自主性試驗(yàn)與評(píng)估屬于軍事智能試驗(yàn)評(píng)估的范疇, 《美軍軍事智能試驗(yàn)評(píng)估技術(shù)發(fā)展態(tài)勢(shì)研究》中將軍事智能試驗(yàn)技術(shù)分為智能化試驗(yàn)對(duì)象技術(shù)和試驗(yàn)手段智能化技術(shù), 如圖1所示[11]。
《智能裝備試驗(yàn)與評(píng)價(jià)的挑戰(zhàn)與對(duì)策思考》認(rèn)為, “智能裝備的試驗(yàn)與評(píng)估是確保智能裝備可靠、 可信和可用的重要基礎(chǔ), 是檢驗(yàn)智能裝備能否在實(shí)際環(huán)境中應(yīng)用的基本前提, 也是加快智能裝備研制進(jìn)度的重要保障”[10]。 在智能無(wú)人機(jī)自主能力試驗(yàn)與評(píng)估過(guò)程中, 需要構(gòu)建相匹配的智能化試驗(yàn)技術(shù)。
2 美國(guó)無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)與評(píng)估方面的做法
2.1 各方政策重視智能化帶來(lái)的自主性試驗(yàn)挑戰(zhàn), 強(qiáng)調(diào)試驗(yàn)與設(shè)計(jì)同步發(fā)展
美國(guó)很早就認(rèn)識(shí)到缺少與自主化、 智能化裝備匹配的試驗(yàn)評(píng)估方法, 迫切需要新的試驗(yàn)評(píng)估技術(shù)應(yīng)對(duì)該挑戰(zhàn), 因此, 在《維持美國(guó)在人工智能領(lǐng)域的領(lǐng)導(dǎo)地位》《人工智能倡議法》《2019年國(guó)家人工智能研究發(fā)展計(jì)劃》《人工智能原則支持文件》等政策文件中[12, 17], 都提出要對(duì)軍事領(lǐng)域的人工智能技術(shù)進(jìn)行持續(xù)的試驗(yàn)與評(píng)估, 必要時(shí)改變現(xiàn)有試驗(yàn)、 評(píng)估、 驗(yàn)證和確認(rèn)程序, 創(chuàng)建新的試驗(yàn)評(píng)估基礎(chǔ)架構(gòu), 旨在從政策、 標(biāo)準(zhǔn)、 技術(shù)手段等方面提升軍事智能的試驗(yàn)與評(píng)估能力, 促進(jìn)人工智能的技術(shù)優(yōu)勢(shì)向作戰(zhàn)優(yōu)勢(shì)轉(zhuǎn)變, 尋求與設(shè)計(jì)技術(shù)同步開(kāi)展研究, 確保試驗(yàn)?zāi)芰Σ粶笥谘b備的發(fā)展, 避免因試驗(yàn)?zāi)芰Φ牟蛔阊舆t裝備研發(fā)進(jìn)程, 從而延緩先進(jìn)戰(zhàn)斗力的生成速度。
2.2 美國(guó)多部門(mén)關(guān)注, 并持續(xù)投資自主領(lǐng)域的試驗(yàn)與評(píng)估項(xiàng)目
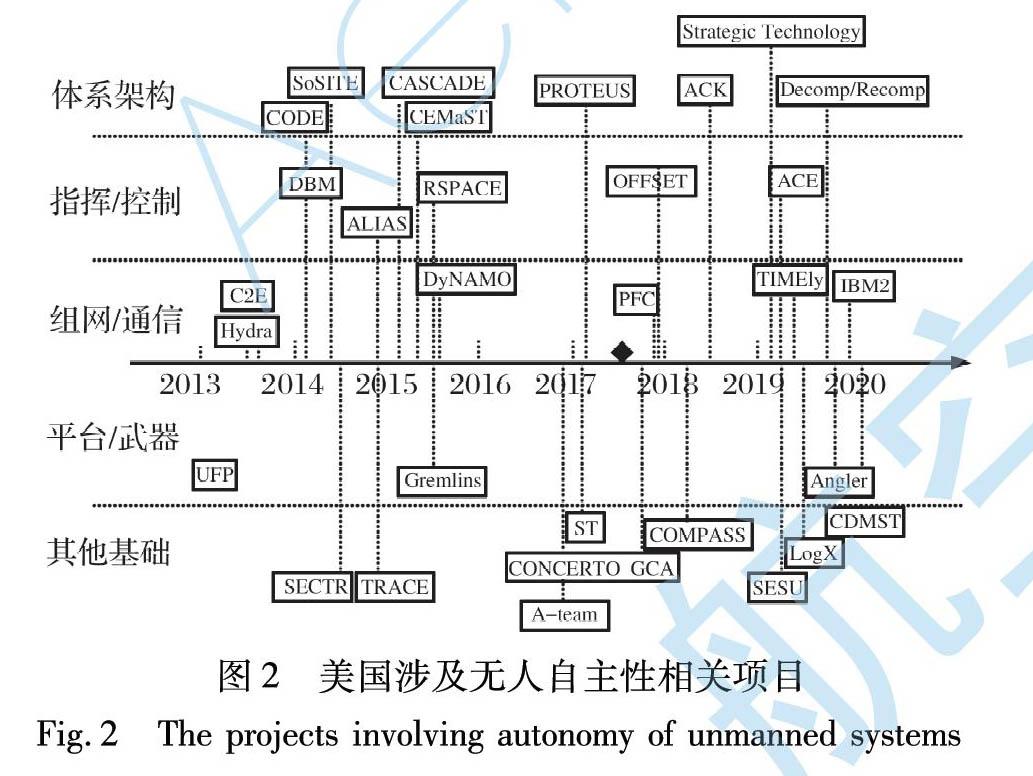
美國(guó)國(guó)防部自2006年開(kāi)始就緊盯自主性試驗(yàn)與評(píng)估面臨的特殊挑戰(zhàn), 一直將無(wú)人自主系統(tǒng)的試驗(yàn)與評(píng)估作為重點(diǎn)投資領(lǐng)域。 在《國(guó)防部試驗(yàn)評(píng)估資源戰(zhàn)略規(guī)劃》中, 將“自主與人工智能”列為試驗(yàn)與評(píng)估科技計(jì)劃的投資方向之一 [12,16], “無(wú)人與自主系統(tǒng)試驗(yàn)”于2007年首次成為該計(jì)劃的7個(gè)領(lǐng)域之一[16]。 自2020財(cái)年開(kāi)始, 無(wú)人與自主系統(tǒng)試驗(yàn)更名為自主性與人工智能試驗(yàn)[11-12,16], 是重點(diǎn)投資的8個(gè)試驗(yàn)技術(shù)領(lǐng)域之一, 具體的重點(diǎn)項(xiàng)目包括增強(qiáng)自主試驗(yàn)與評(píng)估的安全性、 自主性部件的試驗(yàn)與評(píng)估、 自主系統(tǒng)可靠性的測(cè)試等[16], 相應(yīng)的試驗(yàn)技術(shù)已轉(zhuǎn)化應(yīng)用, 如圖2所示。 2011年備忘錄中, 美國(guó)國(guó)防部將自主性和人機(jī)界面交互系統(tǒng)作為7項(xiàng)科技投入中的2個(gè)優(yōu)先事項(xiàng), 并成立自主性興趣小組[13]。 在2014年公開(kāi)的《依托21工作準(zhǔn)則》中, “自主”是其17個(gè)技術(shù)領(lǐng)域之一[16]。 鑒于測(cè)試、 評(píng)估、 驗(yàn)證和確認(rèn)(TEVV)是自主性系統(tǒng)保障的關(guān)鍵要素, 美國(guó)建立了利益共同體(COI)小組來(lái)解決該問(wèn)題, 早在2015年便發(fā)布了一份技術(shù)投資戰(zhàn)略, 其目標(biāo)包括協(xié)助需求開(kāi)發(fā)和分析的方法和工具、 基于證據(jù)的設(shè)計(jì)和實(shí)現(xiàn)、 通過(guò)研究開(kāi)發(fā)累積、 執(zhí)行行為預(yù)測(cè)和恢復(fù)、 自主系統(tǒng)的保證論據(jù)。 《自主性試驗(yàn)、 評(píng)估、 檢驗(yàn)和確認(rèn)技術(shù)投資策略2015-2018》中, 明確了自主能力試驗(yàn)和評(píng)估的研究范圍和能力發(fā)展方向[12]。 美國(guó)國(guó)防高級(jí)研究計(jì)劃局(DARPA)也在不斷增加無(wú)人自主系統(tǒng)及其試驗(yàn)評(píng)估的項(xiàng)目投資, 如進(jìn)攻性集群使能戰(zhàn)術(shù)項(xiàng)目的重要目標(biāo)就是發(fā)展無(wú)人自主集群集成試驗(yàn)環(huán)境, 其他涉及無(wú)人機(jī)系統(tǒng)自主能力的項(xiàng)目也統(tǒng)籌考慮了試驗(yàn)評(píng)估的發(fā)展。
2.3 建立頂層技術(shù)體系框架, 指引自主性發(fā)展方向
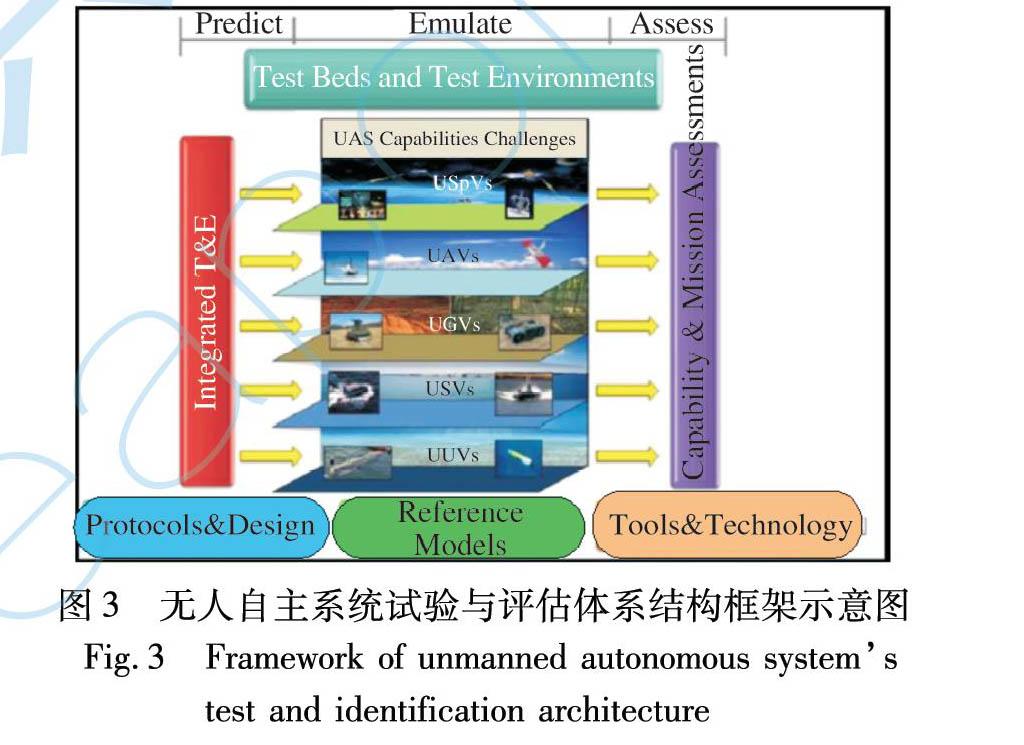
近年來(lái), 美國(guó)出臺(tái)了覆蓋無(wú)人機(jī)、 地面無(wú)人系統(tǒng)、 機(jī)器人等一系列無(wú)人系統(tǒng)技術(shù)發(fā)展規(guī)劃, 包括《美國(guó)陸軍無(wú)人機(jī)系統(tǒng)路線圖》《無(wú)人系統(tǒng)自主技術(shù)路線圖》《無(wú)人系統(tǒng)綜合路線圖》《美國(guó)地面無(wú)人系統(tǒng)路線圖》《美國(guó)機(jī)器人技術(shù)路線圖》以及《自主地平線》等[3]。 尤其是美國(guó)國(guó)防部牽頭制定的8版《無(wú)人系統(tǒng)綜合路線圖》, 持續(xù)指導(dǎo)軍用無(wú)人系統(tǒng)的全面發(fā)展, 雖然各版?zhèn)戎攸c(diǎn)有所不同, 但在各版路線圖中均對(duì)無(wú)人機(jī)自主作戰(zhàn)等級(jí)劃分進(jìn)行了說(shuō)明。 另外, 試驗(yàn)資源管理中心在2011年就制定了圖3所示的無(wú)人自主系統(tǒng)試驗(yàn)評(píng)估體系結(jié)構(gòu)框架[12]。 其中包括面向五類(lèi)作戰(zhàn)空間的自主系統(tǒng)、 七類(lèi)自主性支撐技術(shù)、 四層自主系統(tǒng)試驗(yàn)類(lèi)型、 五類(lèi)自主系統(tǒng)評(píng)價(jià)指標(biāo)以及基于“觀察、 調(diào)整、 決策、 行動(dòng)”(OODA)環(huán)的“真實(shí)、 虛擬、 構(gòu)造”(LVC)試驗(yàn)環(huán)境, 從而實(shí)現(xiàn)相關(guān)技術(shù)成體系發(fā)展[12]。 該技術(shù)體系框架不僅對(duì)自主性試驗(yàn)有指導(dǎo)意義, 對(duì)構(gòu)建整個(gè)智能試驗(yàn)技術(shù)體系也有重要參考價(jià)值。
2.4 大力開(kāi)展演示驗(yàn)證試飛, 提高技術(shù)成熟度
近年來(lái), 美國(guó)針對(duì)“忠誠(chéng)僚機(jī)”“分布式作戰(zhàn)”“馬賽克戰(zhàn)”“蜂群”作戰(zhàn)等項(xiàng)目陸續(xù)進(jìn)行了多階段試飛, 對(duì)無(wú)人系統(tǒng)作戰(zhàn)能力進(jìn)行充分的驗(yàn)證, 比作戰(zhàn)理念和裝備研發(fā)更重視演示驗(yàn)證試飛, 以加速技術(shù)成熟[8]。
2.5 出臺(tái)自主性試驗(yàn)評(píng)估規(guī)則, 研究新的采辦策略
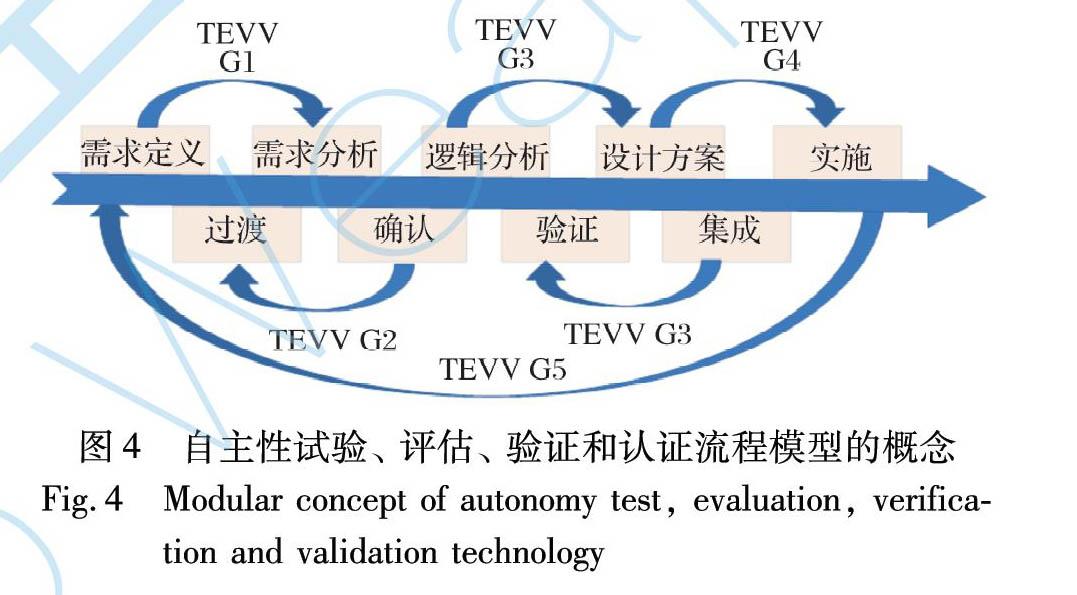
美國(guó)國(guó)防部指令3000.09要求, 自主性武器必須經(jīng)過(guò)嚴(yán)格的硬件驗(yàn)證和認(rèn)證[15], 以及現(xiàn)實(shí)系統(tǒng)開(kāi)發(fā)和操作的試驗(yàn)與評(píng)估, 包括分析復(fù)雜操作環(huán)境導(dǎo)致的自主或半自主系統(tǒng)的意外應(yīng)急行為, 并擴(kuò)大了驗(yàn)證與認(rèn)證以及試驗(yàn)評(píng)估的范圍, 要求在現(xiàn)實(shí)條件下評(píng)估系統(tǒng)性能、 能力、 可靠性、 效率和適用性, 但同時(shí)認(rèn)為現(xiàn)有做法無(wú)法滿(mǎn)足自主能力的試驗(yàn)與評(píng)估, 正在研究新的采辦流程, 試圖將經(jīng)典“V”模型替換為圖4所示的扁平模型[13]。
3 無(wú)人機(jī)自主能力評(píng)價(jià)模型在試飛評(píng)價(jià)中的適用性分析
無(wú)人機(jī)的自主作戰(zhàn)能力最終以自主等級(jí)來(lái)表征。 美國(guó)在持續(xù)開(kāi)展自主作戰(zhàn)相關(guān)設(shè)計(jì)技術(shù)研究的同時(shí), 對(duì)無(wú)人機(jī)自主能力評(píng)價(jià)技術(shù)進(jìn)行了大量研究, 形成了多種評(píng)價(jià)方法, 主要有寬泛分類(lèi)和精確分類(lèi)兩大類(lèi)[18-29]。
3.1 寬泛分類(lèi)法
考慮到無(wú)人機(jī)需要人員的介入, 實(shí)戰(zhàn)過(guò)程中需要明確人-機(jī)權(quán)限分配問(wèn)題, 形成了多種比較寬泛的分類(lèi)方法, 主要有國(guó)防部的人機(jī)權(quán)限4級(jí)模型[6,19]、 “美國(guó)國(guó)家航空航天局”(NASA)的6級(jí)飛行器自主等級(jí)[6,19]、 美國(guó)海軍5級(jí)自主等級(jí)模型[2]。 美國(guó)國(guó)防部在2011、 2013版無(wú)人系統(tǒng)路線圖中采用了人機(jī)權(quán)限4級(jí)評(píng)價(jià)模型, 分為人操作、 人委派、 人監(jiān)督、 完全自主4個(gè)等級(jí), 人的權(quán)限越低, 機(jī)器權(quán)限越高, 自主性越強(qiáng)[19]。 NASA將高空長(zhǎng)航程科學(xué)任務(wù)分為6個(gè)自主等級(jí), 分別是遙控、 簡(jiǎn)單的自動(dòng)操作、 遠(yuǎn)程操作、 高度自動(dòng)化(半自主)、 完全自主、 協(xié)同操作, 通過(guò)掌控的時(shí)間多少來(lái)量化分析自主等級(jí)[19]。 美國(guó)海軍2021年3月在《無(wú)人作戰(zhàn)框架》中將自主性依賴(lài)由低到高分為人操作、 遠(yuǎn)程操作、 人類(lèi)監(jiān)督、 人類(lèi)編組、 接近獨(dú)立5個(gè)層級(jí)[2]。 這類(lèi)模型太過(guò)寬泛、 主觀性過(guò)強(qiáng), 對(duì)于定量的試驗(yàn)與評(píng)估而言?xún)H具有參考意義。
3.2 精確分類(lèi)法
(1) Sheridan 的自動(dòng)裝置等級(jí)(LOA)評(píng)價(jià)法
LOA評(píng)價(jià)法最早產(chǎn)生于1991年, 其將系統(tǒng)的自主性等級(jí)分成10級(jí), 范圍從計(jì)算機(jī)不提供任何幫助、 完全由人進(jìn)行操作到計(jì)算機(jī)自己選擇并執(zhí)行任務(wù)、 完全不依賴(lài)于人[19]。 該方法注重通用性, 但考慮的因素較為簡(jiǎn)單, 難以轉(zhuǎn)換為詳細(xì)的評(píng)估指標(biāo)體系, 對(duì)于基于試驗(yàn)的評(píng)價(jià)而言, 實(shí)際使用不便。
(2) 自主控制水平等級(jí)(ACL)
美國(guó)空軍實(shí)驗(yàn)室定義了無(wú)人機(jī)的10個(gè)自主性等級(jí)[13], 如圖5所示。 美國(guó)國(guó)防部前3版無(wú)人機(jī)路線圖采取了這種定義方法, 同時(shí)對(duì)在研的無(wú)人機(jī)均做出了自主性等級(jí)評(píng)定。 該方法在提出時(shí)具有很強(qiáng)的前瞻性, 時(shí)至今日, 對(duì)當(dāng)前國(guó)際上大部分無(wú)人機(jī)自主性評(píng)價(jià)均有一定的借鑒意義,? 因此具有較強(qiáng)的實(shí)際意義。 但是其指標(biāo)分類(lèi)不統(tǒng)一, 顆粒度不均衡, 前后關(guān)聯(lián)性不強(qiáng), 且都是定性評(píng)價(jià), 對(duì)于要投入實(shí)戰(zhàn)的無(wú)人機(jī)而言, 評(píng)價(jià)指標(biāo)太過(guò)寬泛, 無(wú)法完全依據(jù)該評(píng)價(jià)方法確定無(wú)人機(jī)自主等級(jí), 試驗(yàn)過(guò)程中需要進(jìn)行細(xì)化。
(3) 無(wú)人系統(tǒng)自主性框架(ALFUS)
美國(guó)于2004年提出了一種ALFUS框架, 試圖從任務(wù)復(fù)雜度、 環(huán)境復(fù)雜性、 人機(jī)交互程度等三個(gè)方面來(lái)建立評(píng)價(jià)框架, 期望成為一種無(wú)人系統(tǒng)自主能力的通用量化評(píng)估框架[13,18], 如圖6所示。 該框架不是一個(gè)特定的測(cè)試或一組指標(biāo), 而是代表一組表征自主性水平的多維指標(biāo)模型。 通過(guò)在每個(gè)軸向上分別建立度量方法, 最終定義了人機(jī)交互從高到低, 環(huán)境從簡(jiǎn)單到復(fù)雜, 任務(wù)從簡(jiǎn)單到復(fù)雜, 低、 中、 高3個(gè)自主層級(jí)[13,18]。 該框架模型考慮環(huán)境、 任務(wù)和人機(jī)交互方面的實(shí)際因素較多, 不限定于特定領(lǐng)域, 不僅關(guān)注物理空間, 還利用“任務(wù)空間”作為衡量自主性的背景, 可以反映無(wú)人機(jī)執(zhí)行任務(wù)的能力, 對(duì)試驗(yàn)與評(píng)估而言具有較高的借鑒意義, 已推廣到一些地面無(wú)人車(chē)輛的試驗(yàn)與評(píng)估中。
但是, ALFUS框架不提供任何以標(biāo)準(zhǔn)方式分解任務(wù)的工具, 沒(méi)有提供一種客觀的方法描述系統(tǒng)的自主性能力映射到整體自主性水平, 而且建立的系統(tǒng)比較開(kāi)放[19], 導(dǎo)致同一無(wú)人機(jī)、 不同方案的評(píng)價(jià)結(jié)果差異較大, 可能提供很多的間隔尺寸。 具體實(shí)施過(guò)程中, 每個(gè)坐標(biāo)軸如何選取指標(biāo)、 如何量化定義比較困難, 需要根據(jù)系統(tǒng)特點(diǎn)慎重制定。
(4) 基于OODA的自主等級(jí)評(píng)價(jià)模型
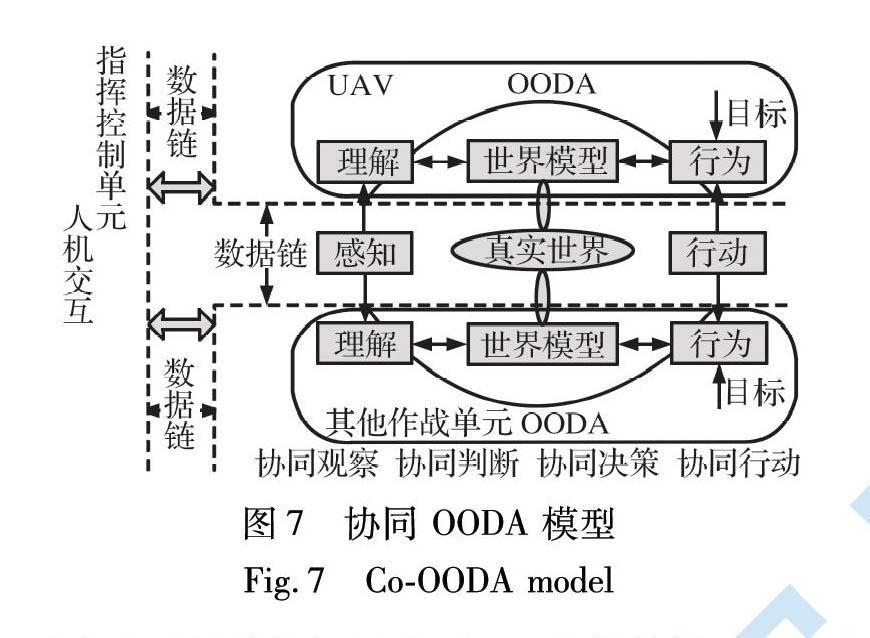
2002年, 美國(guó)空軍實(shí)驗(yàn)室自動(dòng)化領(lǐng)域的知名專(zhuān)家布魯斯結(jié)合“觀察、 調(diào)整、 決策、 行動(dòng)”(OODA)環(huán)的原理, 對(duì)ACL進(jìn)行了較大修改, 分成遙控駕駛(0級(jí))、 執(zhí)行預(yù)先規(guī)劃任務(wù)、 可變?nèi)蝿?wù)、 實(shí)時(shí)故障/事件的魯棒響應(yīng)、 故障/事件自適應(yīng)、 實(shí)時(shí)多平臺(tái)協(xié)同、 戰(zhàn)場(chǎng)認(rèn)識(shí)、 戰(zhàn)場(chǎng)認(rèn)知、 戰(zhàn)場(chǎng)集群認(rèn)知和完全自主(10級(jí))共11個(gè)等級(jí), 分別針對(duì)OODA中的每個(gè)環(huán)節(jié)進(jìn)行基于ACL模型的自主等級(jí)劃分[6,21]。 NASA的普勞德在其報(bào)告中基于OODA環(huán)將自主性分為8個(gè)等級(jí), 也是分別對(duì)OODA環(huán)中的每個(gè)環(huán)節(jié)都進(jìn)行了自主等級(jí)劃分, 同時(shí)還給出詳細(xì)的評(píng)價(jià)實(shí)例[6,22]。 為了評(píng)價(jià)無(wú)人機(jī)與其他系統(tǒng)協(xié)同作戰(zhàn)的能力, 國(guó)防科技大學(xué)還提出協(xié)同OODA模型[29], 增加了OODA模型對(duì)協(xié)同和交互性能的描述, 從感知、 分析、 規(guī)劃、 協(xié)同、 執(zhí)行五個(gè)維度評(píng)價(jià)UAV系統(tǒng)自主性等級(jí), 如圖7所示。
這些方法雖然等級(jí)標(biāo)準(zhǔn)不一, 但都是通過(guò)對(duì)OODA的每個(gè)環(huán)節(jié)進(jìn)行自主等級(jí)劃分和評(píng)價(jià), 分別以不同的行為模式定義自主等級(jí), 對(duì)整個(gè)作戰(zhàn)過(guò)程考慮比較全面, 比較適合智能無(wú)人機(jī)系統(tǒng), 可分別牽引各部分技術(shù)發(fā)展[1], 但是對(duì)于每個(gè)部分的定級(jí)比較困難, 不同無(wú)人機(jī)的需求不同, 在實(shí)際試驗(yàn)應(yīng)用中應(yīng)詳細(xì)制定針對(duì)性的標(biāo)準(zhǔn)。
3.3 其他領(lǐng)域自主等級(jí)分類(lèi)
無(wú)人機(jī)領(lǐng)域經(jīng)過(guò)20多年的研究, 仍無(wú)權(quán)威、 具有實(shí)際使用意義的自主等級(jí)標(biāo)準(zhǔn), 而汽車(chē)自動(dòng)駕駛領(lǐng)域發(fā)展較快, 在這方面有更實(shí)質(zhì)的進(jìn)步。 美國(guó)機(jī)動(dòng)車(chē)工程師協(xié)會(huì)在2016年提出了0~5級(jí)的汽車(chē)自動(dòng)化駕駛劃分指導(dǎo), 國(guó)內(nèi)工信部也在2020年3月提出了《汽車(chē)駕駛自動(dòng)化分級(jí)(報(bào)批稿)》國(guó)家標(biāo)準(zhǔn), 將自動(dòng)化駕駛分為0~5級(jí), 這都是權(quán)威機(jī)構(gòu)或部門(mén)的標(biāo)準(zhǔn), 意味著汽車(chē)在自主能力評(píng)價(jià)方面比無(wú)人機(jī)更為成熟。
由于人工智能技術(shù)在航空裝備領(lǐng)域應(yīng)用還不成熟, 且自主能力的試驗(yàn)組織難度大、 周期長(zhǎng)、 消耗大, 使得相關(guān)理論、 技術(shù)的驗(yàn)證進(jìn)度比較緩慢, 目前仍處于對(duì)智能無(wú)人機(jī)自主性試驗(yàn)與評(píng)估的探索中, 各個(gè)方法都有其優(yōu)缺點(diǎn), 尚未形成滿(mǎn)足實(shí)用并普遍認(rèn)同的等級(jí)劃分, 很難有一個(gè)模型對(duì)不同類(lèi)型無(wú)人機(jī)都適用。 在實(shí)際試驗(yàn)過(guò)程中(尤其攻擊型無(wú)人機(jī)), 對(duì)基于OODA的模型、 ALFUS框架和ACL這三種模型進(jìn)行綜合考慮, 可能在實(shí)際試飛中比較有價(jià)值和可操作性。
4 無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)評(píng)估技術(shù)的重點(diǎn)發(fā)展領(lǐng)域
無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)評(píng)估的主要任務(wù)是解決系統(tǒng)能否在無(wú)人干預(yù)情況下實(shí)施自主作戰(zhàn)的問(wèn)題。 由于無(wú)人機(jī)具有了自主行為, 使得作戰(zhàn)任務(wù)和作戰(zhàn)能力相比傳統(tǒng)機(jī)械化、 信息化裝備大幅擴(kuò)展, 必然導(dǎo)致試驗(yàn)和評(píng)估需求有所增加, 當(dāng)前的試驗(yàn)評(píng)估技術(shù)體系無(wú)法完成對(duì)其進(jìn)行試驗(yàn)和評(píng)估的任務(wù), 必須從一些方面重點(diǎn)開(kāi)展研究, 建立與自主無(wú)人機(jī)系統(tǒng)相匹配的試驗(yàn)評(píng)估技術(shù)體系。 美國(guó)國(guó)防部在2015年提出, 試驗(yàn)需求、 試驗(yàn)工具、 試驗(yàn)方法等8個(gè)關(guān)鍵領(lǐng)域是無(wú)人機(jī)自主系統(tǒng)的重要方面, 貫穿整個(gè)采購(gòu)[30]。 美國(guó)防御分析研究所2018年也指出, 對(duì)抗試驗(yàn)等技術(shù)是無(wú)人機(jī)自主性試驗(yàn)中的關(guān)鍵[31]。 針對(duì)未來(lái)戰(zhàn)爭(zhēng)形態(tài)和裝備研發(fā)模式, 無(wú)人機(jī)自主作戰(zhàn)能力試驗(yàn)評(píng)估技術(shù)的重要發(fā)展領(lǐng)域主要包括以下方面。
4.1 重塑試驗(yàn)評(píng)估模式
試驗(yàn)?zāi)J绞茄b備試驗(yàn)評(píng)估的基本框架和路線, 只有確定了試驗(yàn)?zāi)J剑?才能開(kāi)展后續(xù)的試驗(yàn)。 當(dāng)前, 機(jī)械化、 信息化裝備的試驗(yàn)評(píng)估模型、 體系、 技術(shù)已經(jīng)比較健全, 其中一些關(guān)鍵點(diǎn)的進(jìn)步是其發(fā)展的重點(diǎn)方向。 而智能化裝備的試驗(yàn)評(píng)估尚處于起步階段, 由于被試對(duì)象的智能化特性, 當(dāng)前試驗(yàn)評(píng)估模式不再適用, 需要建立新的試驗(yàn)評(píng)估模式。
首先是要研究虛實(shí)跨域融合的試驗(yàn)評(píng)估模式。 對(duì)無(wú)人機(jī)自主性的評(píng)價(jià)需要對(duì)其內(nèi)部算法進(jìn)行大量的驗(yàn)證。 由于算法規(guī)模龐大, 且持續(xù)學(xué)習(xí)進(jìn)步, 無(wú)法完全依靠真實(shí)飛行試驗(yàn)的方式試驗(yàn)和評(píng)估, 必須大量采信仿真的結(jié)果, 這方面需要數(shù)字孿生、 平行仿真等技術(shù)的應(yīng)用, 實(shí)現(xiàn)虛實(shí)互動(dòng)、 共同試驗(yàn)。
其次是要研究多階段融合的一體化試驗(yàn)?zāi)J健?雖然美國(guó)當(dāng)前的試驗(yàn)評(píng)估強(qiáng)調(diào)“左移”“一體化”, 但其性能試驗(yàn)、 作戰(zhàn)試驗(yàn)等部分仍然是分立為主, 各個(gè)階段有機(jī)融合, 但各個(gè)階段的獨(dú)立性仍然存在, 而智能化無(wú)人機(jī), 由于存在“會(huì)學(xué)習(xí)”“能進(jìn)步”這一“智力”增長(zhǎng)的最突出特點(diǎn), 導(dǎo)致試驗(yàn)評(píng)估需要各個(gè)階段實(shí)現(xiàn)真正的融合與一體化, 避免性能試驗(yàn)評(píng)價(jià)對(duì)象智力為“小學(xué)生級(jí)”, 作戰(zhàn)試驗(yàn)評(píng)價(jià)對(duì)象智力為“博士級(jí)”, 各個(gè)階段的自主等級(jí)評(píng)價(jià)完全不同, 結(jié)果互不適用。 另外, 對(duì)于自主性無(wú)人機(jī), 更強(qiáng)調(diào)對(duì)于算法的持續(xù)驗(yàn)證及模型的持續(xù)優(yōu)化, 需要實(shí)驗(yàn)室和外場(chǎng)之間保持持續(xù)的聯(lián)系和互動(dòng), 甚至實(shí)現(xiàn)平行試驗(yàn)。 由于這些特點(diǎn), 需要建立真正意義上一體化的試驗(yàn)評(píng)估模式, 將研制方、 試驗(yàn)方從一開(kāi)始融合在同一試驗(yàn)評(píng)估團(tuán)隊(duì), 加強(qiáng)模型和數(shù)據(jù)的共用, 這對(duì)當(dāng)前的研發(fā)和試驗(yàn)體系是巨大的挑戰(zhàn)。
最后, 要研究單樣本持續(xù)增長(zhǎng)的試驗(yàn)評(píng)估模式。 傳統(tǒng)裝備的試驗(yàn)評(píng)估遵循“建立模型→仿真預(yù)測(cè)→飛行試驗(yàn)→模型修正”循環(huán)迭代的方式[12], 然而, 對(duì)于自主作戰(zhàn)的無(wú)人機(jī)而言, 其龐大的算法空間規(guī)模、 不確定的黑箱推理模型、 不確定的作戰(zhàn)行為, 導(dǎo)致無(wú)法重復(fù)狀態(tài), 且行為持續(xù)學(xué)習(xí)、 進(jìn)化, 致使預(yù)測(cè)-試驗(yàn)-比較的模式行不通, 出現(xiàn)一個(gè)狀態(tài)一個(gè)樣本, 但是樣本持續(xù)增長(zhǎng)的情況, 需要著重研究這種單樣本持續(xù)增長(zhǎng)的試驗(yàn)評(píng)估模式。
4.2 高智能對(duì)抗型試驗(yàn)環(huán)境構(gòu)建
試驗(yàn)環(huán)境是進(jìn)行無(wú)人機(jī)自主系統(tǒng)研究、 學(xué)習(xí)、 測(cè)試、 驗(yàn)證和演練必不可少的條件。 由于無(wú)人機(jī)自主性試驗(yàn)和評(píng)估涉及信息、 控制、 社會(huì)學(xué)等, 傳統(tǒng)的靶場(chǎng)、 試驗(yàn)設(shè)施已無(wú)法支撐, 這是因?yàn)樽灾餍蜔o(wú)人機(jī)具備學(xué)習(xí)能力, 有什么樣的環(huán)境就會(huì)訓(xùn)練出什么樣的智能算法和裝備, 經(jīng)歷高智能、 高對(duì)抗性、 高復(fù)雜度環(huán)境的磨練, 才能使裝備更聰明, 自主能力更強(qiáng)、 更可靠, 因此對(duì)于無(wú)人機(jī)自主能力的評(píng)價(jià), 要建設(shè)能夠與無(wú)人機(jī)持續(xù)交戰(zhàn)的背景環(huán)境、 干擾環(huán)境和目標(biāo)環(huán)境, 能夠根據(jù)無(wú)人機(jī)的行為持續(xù)改變環(huán)境特征, 這樣才能真正激勵(lì)無(wú)人機(jī)的自主作戰(zhàn)行為, 挖掘其潛力, 培養(yǎng)其能力。
4.3 建立試驗(yàn)評(píng)估技術(shù)體系
一次完整的試驗(yàn)評(píng)估包含試驗(yàn)設(shè)計(jì)、 試驗(yàn)設(shè)施、 數(shù)據(jù)采集、 結(jié)果分析與評(píng)價(jià)等關(guān)鍵步驟。 由于“自主”的特殊性, 對(duì)這些關(guān)鍵步驟也需要研究全新的技術(shù)。
在試驗(yàn)設(shè)計(jì)方面, 針對(duì)智能算法規(guī)模的急劇增加、 樣本空間沒(méi)有邊界、 多學(xué)科交叉等問(wèn)題, 需要研究與傳統(tǒng)正交試驗(yàn)設(shè)計(jì)、 均勻試驗(yàn)設(shè)計(jì)等不同的試驗(yàn)設(shè)計(jì)方法。
在數(shù)據(jù)采集和處理方面, 若對(duì)無(wú)人機(jī)全系統(tǒng)數(shù)據(jù)均進(jìn)行采集、 記錄, 會(huì)導(dǎo)致數(shù)據(jù)采集記錄系統(tǒng)龐大, 對(duì)于載重小的無(wú)人機(jī)而言, 可能無(wú)法裝載足夠多的測(cè)試設(shè)備, 若按當(dāng)前的模式, 事先制定部分采集方案, 又可能對(duì)無(wú)人機(jī)作戰(zhàn)中意料之外的“自主”行為特征數(shù)據(jù)漏采, 影響事后的分析評(píng)判, 因此需要研究自主的數(shù)據(jù)采集技術(shù), 能夠根據(jù)任務(wù)、 行為“自主”改變部分?jǐn)?shù)據(jù)的采集、 記錄內(nèi)容、 方式。
在結(jié)果評(píng)估方面, 為了實(shí)現(xiàn)自主能力的評(píng)估, 需要針對(duì)智能力、 信任度、 魯棒性、 效能、 人機(jī)交互等方面建立新的評(píng)估模型, 這些方面評(píng)估的重要性已經(jīng)超過(guò)了當(dāng)前無(wú)人機(jī)“高度、 速度、 打擊距離…”等指標(biāo)的評(píng)估。 同時(shí), 為了實(shí)現(xiàn)對(duì)這些新指標(biāo)的評(píng)估, 需要構(gòu)建有別于當(dāng)前基于經(jīng)典統(tǒng)計(jì)、 Bayes統(tǒng)計(jì)方法的數(shù)據(jù)處理模型, 因?yàn)橛捎谧灾餍缘拇嬖冢?不同行為樣本的分布特性難以確定, 甚至是完全不同的。
4.4 建立自主性等級(jí)標(biāo)準(zhǔn)
制定自主性等級(jí)評(píng)價(jià)標(biāo)準(zhǔn)、 給出無(wú)人機(jī)的自主性等級(jí), 是自主無(wú)人機(jī)試驗(yàn)評(píng)估的顯著特點(diǎn), 與當(dāng)前裝備的評(píng)價(jià)明顯不同。
明確的自主能力分級(jí)是研發(fā)、 試驗(yàn)、 使用的基礎(chǔ)。 當(dāng)前, 由于無(wú)人機(jī)類(lèi)型眾多、 作戰(zhàn)任務(wù)模式多樣, 對(duì)自主性的認(rèn)識(shí)還不統(tǒng)一, 尚無(wú)權(quán)威統(tǒng)一的自主性評(píng)價(jià)標(biāo)準(zhǔn)體系和方法, 造成在論證、 設(shè)計(jì)、 制造、 試驗(yàn)過(guò)程中, 各方對(duì)于自主性的認(rèn)識(shí)不統(tǒng)一, 交流“頻道”不一, 影響技術(shù)的開(kāi)發(fā)及裝備的研發(fā)和作戰(zhàn)使用。 為確保合理的研發(fā)使用, 必須建立自主性等級(jí)評(píng)價(jià)。 自主能力分級(jí)是衡量自主能力的可靠工具, 使得自主能力有可比性, 為發(fā)展方向提供明確指示。
準(zhǔn)確的自主能力分級(jí)是合理任務(wù)分配的前提。 人機(jī)協(xié)同的主要作戰(zhàn)模式有: 有人機(jī)支配無(wú)人機(jī), 有人機(jī)協(xié)助無(wú)人機(jī), 有人機(jī)、 無(wú)人機(jī)互補(bǔ)等。 無(wú)人機(jī)自主系統(tǒng)逐漸演變?yōu)榕c人并肩作戰(zhàn)的全功能隊(duì)友, 不同復(fù)雜度、 不同環(huán)境任務(wù)對(duì)于裝備能力的需求不同, 用等級(jí)太高的無(wú)人機(jī)執(zhí)行低等級(jí)任務(wù), 是“殺雞用牛刀”, 用低等級(jí)無(wú)人機(jī)執(zhí)行高等級(jí)任務(wù), 則難以完成任務(wù), 合理的無(wú)人機(jī)等級(jí)劃分, 可以使得任務(wù)分配更合理。
4.5 通用型模型、 工具的建設(shè)
裝備的試驗(yàn)和評(píng)估過(guò)程中, 需要一些特定模型和工具的支撐。 對(duì)于機(jī)械化、 信息化的裝備而言, 存在種類(lèi)少的特點(diǎn), 如美國(guó)目前主流殲擊機(jī)主要有F-22, F-35, 且一代裝備研制需要數(shù)十年, 模型、 工具開(kāi)發(fā)尚能應(yīng)付裝備的試驗(yàn), 但是其無(wú)人機(jī)裝備類(lèi)型多、 數(shù)量多, 發(fā)展速度快, 未來(lái)的自主性無(wú)人機(jī)發(fā)展速度會(huì)更快, 導(dǎo)致無(wú)法針對(duì)每種自主性無(wú)人機(jī)去研發(fā)配套相應(yīng)的模型、 工具, 必須研究通用、 互操作的模型、 工具等試驗(yàn)資源, 以應(yīng)對(duì)多種多樣的智能無(wú)人系統(tǒng)。 為實(shí)現(xiàn)通用模型、 工具的研發(fā), 還需要相應(yīng)的標(biāo)準(zhǔn)、 架構(gòu)的開(kāi)發(fā)。
4.6 試驗(yàn)評(píng)估中應(yīng)用人工智能技術(shù)
隨著技術(shù)的發(fā)展, 人工智能不再是一種神秘的力量, 而是一種普適性的使能技術(shù), 是促進(jìn)社會(huì)各個(gè)方面進(jìn)步的通用工具, 如同蒸汽、 電力一樣, 只有加快應(yīng)用步伐, 才能提高試驗(yàn)和評(píng)估技術(shù)的整體進(jìn)步, 而且有的領(lǐng)域不應(yīng)用人工智能技術(shù)已經(jīng)無(wú)法解決, 如海量算法空間的試驗(yàn)設(shè)計(jì)、 大量非結(jié)構(gòu)化數(shù)據(jù)的處理和分析、 智能對(duì)抗環(huán)境的構(gòu)建等等。 試驗(yàn)與評(píng)估是裝備的量尺, 其智能化水平必須比裝備更高, 才有可能量測(cè)出裝備的具體性能。
5 發(fā)展建議
針對(duì)無(wú)人機(jī)自主性試驗(yàn)與評(píng)估的重要發(fā)展領(lǐng)域, 對(duì)標(biāo)美國(guó)的做法, 為國(guó)內(nèi)相關(guān)的研究提出以下建議。
加大頂層規(guī)劃力度, 加快技術(shù)研究速度。 人工智能技術(shù)是有可能顛覆現(xiàn)有大國(guó)格局的關(guān)鍵技術(shù)。 美國(guó)在軍事智能技術(shù)大量應(yīng)用之前, 已經(jīng)認(rèn)識(shí)到現(xiàn)有試驗(yàn)評(píng)估技術(shù)無(wú)法應(yīng)對(duì)自主性的要求, 因此, 早早規(guī)劃了試驗(yàn)技術(shù)的發(fā)展。 智能技術(shù)的發(fā)展速度遠(yuǎn)遠(yuǎn)超過(guò)機(jī)械化、 信息化技術(shù)的發(fā)展速度, 導(dǎo)致無(wú)人機(jī)自主性能力快速提升, 而自主型無(wú)人機(jī)比以往任何領(lǐng)域都更需要充分的試驗(yàn)和評(píng)價(jià)。 為避免試驗(yàn)技術(shù)發(fā)展速度與設(shè)計(jì)技術(shù)不匹配、 無(wú)法合理評(píng)估裝備情況的出現(xiàn), 國(guó)內(nèi)也必須體系化考慮自主型無(wú)人機(jī)的發(fā)展問(wèn)題, 與先進(jìn)自主型理論、 技術(shù)的發(fā)展一道同步規(guī)劃試驗(yàn)技術(shù)的研究和資源建設(shè), 加大對(duì)試驗(yàn)?zāi)P汀?試驗(yàn)技術(shù)體系的研究速度, 盡早完成準(zhǔn)備。
加大人工智能技術(shù)在試驗(yàn)評(píng)估中的應(yīng)用, 革新試驗(yàn)技術(shù)體系。 人工智能技術(shù)在裝備中的應(yīng)用, 將帶來(lái)革命性的變化。 試驗(yàn)與評(píng)估技術(shù)作為“尺子”, 必須構(gòu)建更智能的環(huán)境、 更智能的對(duì)手、 更智能的試驗(yàn)手段, 才能度量智能技術(shù)水平, 才能應(yīng)對(duì)無(wú)人機(jī)自主性的試驗(yàn)和評(píng)估任務(wù)。
加大對(duì)民用通用型模型、 工具、 標(biāo)準(zhǔn)、 框架的研究和應(yīng)用, 提升軍用無(wú)人機(jī)自主性試驗(yàn)與評(píng)估的整體進(jìn)步速度。 國(guó)內(nèi)對(duì)于無(wú)人機(jī)自主能力的評(píng)估還處于起步階段, 但國(guó)內(nèi)外民用領(lǐng)域針對(duì)機(jī)器學(xué)習(xí)、 語(yǔ)音識(shí)別、 深度學(xué)習(xí)等基礎(chǔ)技術(shù)領(lǐng)域, 以及無(wú)人車(chē)、 機(jī)器人等典型應(yīng)用場(chǎng)景構(gòu)建了部分專(zhuān)用測(cè)試工具、 模型, 開(kāi)展了大量的公路測(cè)試、 試用, 已經(jīng)比較成熟, 且出臺(tái)或正在制定一系列標(biāo)準(zhǔn)[32], 但是在無(wú)人機(jī)領(lǐng)域推廣不夠, 對(duì)于人工智能這種通用化較強(qiáng)的技術(shù), 且民用研究遠(yuǎn)遠(yuǎn)大于軍用研究的情況下, 必須加大對(duì)民用通用測(cè)試工具、 標(biāo)準(zhǔn)、 框架的研究和推廣, 強(qiáng)力推進(jìn)在軍用無(wú)人機(jī)領(lǐng)域的應(yīng)用, 加快研發(fā)進(jìn)度、 降低技術(shù)風(fēng)險(xiǎn)。
6 結(jié)? 論
(1) 由于人工智能技術(shù)的應(yīng)用, 無(wú)人機(jī)自主作戰(zhàn)發(fā)展是不可逆的高速發(fā)展過(guò)程, 將顛覆傳統(tǒng)的作戰(zhàn)模式和制勝機(jī)理, 必須正視并積極應(yīng)用, 但面臨戰(zhàn)爭(zhēng)倫理、 信任度等問(wèn)題, 充分的試驗(yàn)與評(píng)估是確保其投入使用的關(guān)鍵。
(2) 美國(guó)早早認(rèn)識(shí)到自主性試驗(yàn)與評(píng)估的挑戰(zhàn)和困難, 出臺(tái)了大量政策, 支持大量的項(xiàng)目研究。
(3) 自主等級(jí)是無(wú)人機(jī)自主作戰(zhàn)能力的最終體現(xiàn), 國(guó)內(nèi)外學(xué)者研究了多種模型, 但各有利弊, 適用范圍不同, 在試驗(yàn)評(píng)估中需要綜合分析運(yùn)用。
(4) 為了實(shí)現(xiàn)無(wú)人機(jī)自主作戰(zhàn)能力的試驗(yàn)和評(píng)估, 需要在試驗(yàn)?zāi)J健?試驗(yàn)技術(shù)體系、 環(huán)境構(gòu)建、 人工智能技術(shù)的應(yīng)用、 通用模型工具等方面進(jìn)行重點(diǎn)研究。
(5) 為了匹配設(shè)計(jì)技術(shù)的發(fā)展, 建議加大試驗(yàn)評(píng)估技術(shù)的頂層規(guī)劃, 實(shí)現(xiàn)試驗(yàn)技術(shù)與設(shè)計(jì)技術(shù)同步發(fā)展, 通過(guò)運(yùn)用人工智能技術(shù), 增加通用模型、 工具等的開(kāi)發(fā), 快速提升無(wú)人機(jī)自主性試驗(yàn)與評(píng)估的發(fā)展。
參考文獻(xiàn):
[1] 楊偉. 關(guān)于未來(lái)戰(zhàn)斗機(jī)發(fā)展的若干討論[J]. 航空學(xué)報(bào), 2020, 41(6): 524377.
Yang Wei. Development of Future Fighters[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 524377.(in Chinese)
[2] Department of the Navy Unmanned Campaign Framework[EB/OL].(2021-03-17)[2021-05-24]. https:∥www.subsim.com/department-of-the-navy-unmanned-campaign-framework/.
[3] Landreth L. Autonomous Horizons: The Way Forward [J]. Air & Space Power Journal, 2020, 34.
[4] 于成龍, 侯俊杰, 蒲洪波, 等. 新一代人工智能在國(guó)防科技領(lǐng)域發(fā)展探討[J]. 國(guó)防科技, 2020, 41(4): 13-18.
Yu Chenglong, Hou Junjie, Pu Hongbo, et al. Development of the New Generation Artificial Intelligence in National Defense Science and Technology[J]. National Defense Technology, 2020, 41(4): 13-18.(in Chinese)
[5] 劉永才. 新形勢(shì)下武器裝備發(fā)展思考[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù), 2020(4): 1-12.
Liu Yongcai. Thoughts on the Development of Weapons and Equipment under the New Situation[J]. Tactical Missile Technology, 2020(4): 1-12.(in Chinese)
[6] 盧新來(lái), 杜子亮, 許赟. 航空人工智能概念與應(yīng)用發(fā)展綜述[J]. 航空學(xué)報(bào), 2021, 42(4): 251-264.
Lu Xinlai, Du Ziliang, Xu Yun. Review on Basic Concept and Applications for Artificial Intelligence in Aviation[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 251-264.(in Chinese)
[7] 雷宏杰, 姚呈康. 面向軍事應(yīng)用的航空人工智能技術(shù)架構(gòu)研究[J]. 導(dǎo)航定位與授時(shí), 2020, 7(1): 1-11.
Lei Hongjie, Yao Chengkang. Technical Architecture of Aviation Artificial Intelligence for Military Application[J]. Navigation Positioning and Timing, 2020, 7(1): 1-11.(in Chinese)
[8] 杜梓冰, 張立豐, 陳敬志, 等. 有人/無(wú)人機(jī)協(xié)同作戰(zhàn)演示驗(yàn)證試飛關(guān)鍵技術(shù)[J]. 航空兵器, 2019, 26(4): 75-81.
Du Zibing, Zhang Lifeng, Chen Jingzhi, et al. Critical Technologies of Demonstration Flight Test of Cooperative Operation for Manned/Unmanned Aerial Vehicles[J]. Aero Weaponry, 2019, 26(4): 75-81.(in Chinese)
[9] Endsley M R. Autonomous Horizons: System Autonomy in the Air Force—A Path to the Future. Volume I: Human-AutonomyTeaming[R]. Washington D C: United States Air Force Office of the Chief Scientist, 2015.
[10] 韋正現(xiàn). 智能裝備試驗(yàn)與測(cè)試的挑戰(zhàn)與對(duì)策思考[J]. 測(cè)控技術(shù), 2021, 40(2): 1-5.
Wei Zhengxian. Challenge and Countermeasure of Intelligent Equipment Experiment and Test[J]. Measurement & Control Technology, 2021, 40(2): 1-5.(in Chinese)
[11] 權(quán)曉偉, 張灝龍, 龔茂華, 等. 美軍軍事智能試驗(yàn)鑒定技術(shù)發(fā)展態(tài)勢(shì)研究[J]. 中國(guó)航天, 2021(2): 62-64.
Quan Xiaowei, Zhang Haolong, Gong Maohua, et al. Research on the Technological Developments of Military Artificial Intelligent Test and Evaluation in US[J]. Aerospace China, 2021(2): 62-64.(in Chinese)
[12] 周宇,楊俊嶺.美軍無(wú)人自主系統(tǒng)試驗(yàn)鑒定挑戰(zhàn)、 做法及啟示[EB/OL]. (2017-03-27) [2021-05-24]. https:∥news.qq.com/a/20170327/019952.htm.
Zhou Yu,Yang Junling. Challenges, Practices and Implications of the Test and Appraisal of Unmanned Autonomous Systems in the US Military[EB/OL]. (2017-03-27) [2021-05-24]. https:∥news.qq./a/ 20170327/019952.htm. (in Chinese)
[13] Ilachinski A. AI, Robots, and Swarms: Issues, Questions, and Recommended Studies[R]. Center for Naval Analyses (CNA), 2017.
[14] Brundage M, Avin S, Clark J, et al. The Malicious Use of Artificial Intelligence: Forecasting, Prevention, and Mitigation[EB/OL]. (2018-02-01)[2021-05-24]. https:∥www.researchgate.net/publication/ 323302750_The_Malicious_Use_of_Artificial_Intelligence_Forecasting_Prevention_and_Mitigation.
[15] Carter A B. Autonomy in Weapon Systems: DOD Directive 3000.09[S]. Washington D C: Department of Defense, 2012.
[16] 張寶珍, 尤晨宇, 吳建龍, 等. 從美國(guó)國(guó)防部試驗(yàn)鑒定科技計(jì)劃看美軍試驗(yàn)與測(cè)試技術(shù)發(fā)展重點(diǎn)[J]. 測(cè)控技術(shù), 2020, 39(10): 1-8.
Zhang Baozhen, You Chenyu, Wu Jianlong, et al. Focus Areas of US Military Test Technology Development in the Light of US Department of Defense Test & Evaluation/Science & Technology Program[J]. Measurement & Control Technology, 2020, 39(10): 1-8.(in Chinese)
[17] 楊俊嶺,周宇.2019年美軍試驗(yàn)鑒定熱點(diǎn)綜述[EB/OL]. (2020-01-21) [2021-05-24]. https:∥ www. sohu.com /a/368196290_635792.
Yang Junling, Zhou Yu. A Review of the Hot Spots of Test Identification in the US Military in 2019[EB/OL].? (2020-01-21) [2021-05-24]. https:∥ www. sohu.com /a/368196290_635792. (in Chinese)
[18] Proud R W, Hart J J, Mrozinski R B. Methods for Determining the Level of Autonomy to Design into a Human Spaceflight Vehicle: A Function Specific Approach[EB/OL]. (2003-09-01)[2021-05-24].http:∥handle.dtic.mil/100.2/ADA515467.
[19] Vincent P, Roske, Jr. Autonomous System Challenges to Test and Evaluation[R]. National Defense Industrial Association Test & Evaluation, 2012.
[20] Fahey H K M, Miller M J. Unmanned Systems Integrated Roadmap:FY2017-2042[R]. Washington DC: Office of the under Secretary of Defense, 2017: 4-5.
[21] Durst P J, Gray W. Levels of Autonomy and Autonomous System Performance Assessment for Intelligent Unmanned Systems[R]. Defense Technical Information Center, 2014.
[22] Zhang J M, Harman M, Ma L, et al. Machine Learning Testing: Survey, Landscapes and Horizons[J]. IEEE Transactions on Software Engineering, 2019.
[23] Thompson M. Testing the Intelligence of Unmanned Autonomous Systems[J]. Security, 2008, 29: 380-387.
[24] Helle P, Schamai W, Strobel C. Testing of Autonomous Systems-Challenges and Current State-of-the-Art[J]. INCOSE International Symposium, 2016, 26(1): 571-584.
[25] Huang H M. Autonomy Levels for Unmanned Systems (ALFUS) Framework, Volume I: Terminology[R]. National Institute of Standards and Technology, 2008.
[26] 劉樹(shù)光, 茹樂(lè), 王柯. 無(wú)人機(jī)自主性評(píng)價(jià)方法新進(jìn)展[J]. 飛航導(dǎo)彈, 2019(2): 43-49.
Liu Shuguang, Ru Le, Wang Ke. New Development of Evaluation Methods for UAV Autonomous Level [J]. Aerodynamic Missile Journal, 2019(2): 43-49.(in Chinese)
[27] Wang Y C, Liu J G. Evaluation Methods for the Autonomy of Unmanned Systems[J]. Chinese Science Bulletin, 2012, 57(26): 3409-3418.
[28] Clough B. Metrics, Schmetrics! How do You Track a UAV’s Autonomy? [C]∥1st UAV Conference, 2002.
[29] Wu L Z, Niu Y F, Zhu H Y, et al. Modeling and Characterizing of Unmanned Aerial Vehicles Autonomy[C]∥ 8th World Congress on Intelligent Control and Automation, 2010: 2284-2288.
[30] Maj Thoma T, Darryl K A. Workshop Report: Test and Evaluation of Autonomous System[C]∥STAT T&E Center of Excellence, 2016.
[31] Brian H, David S, David T. The Status of Test, Evaluation, Verification, and Validation of Autonomous System[R].2018.
[32] 中國(guó)電子技術(shù)標(biāo)準(zhǔn)化研究院.人工智能標(biāo)準(zhǔn)化白皮書(shū)[EB/OL]. (2020-01-21)[2021-05-24].http:∥www.cesi.cn/ 202107/7796.html.
China Electronics Standardization Institute. Artificial Intelligence Standardization White Paper[EB/OL]. (2020-01-21)[2021-05-24]. http:∥www.cesi.cn /202107/7796.html.(in Chinese)
Review on Testing and Evaluation of UAV’s
Autonomous Operational Ability
Du Zibing1 , Chen Yindi2*
(1.Chinese Flight Test Establishment, Xi’an 710089, China;
2.Military Science Information Research Center, Military Academy of Sciences, Beijing 100142, China)
Abstract: In order to carry out the testing and evaluation of the autonomous operational ability of the intelligent UAV , this paper studies the urgency and category of testing and evaluation for UAV autonomous ability, then discusses the main policy, plan, technology of the United States, and examines the applicability of the current typical autonomic rating evaluation model in flight test deeply. It analyzes study contents of remodeling of the test and evaluation model, building of a high-intelligent confrontation test environment, establishment of the test and evaluation technology system, forming of the autonomy level standard, construction of the general model and tools, and artificial intelligence applying in various fields of test and evaluation. Suggestions on concern the plan of test and evaluation from the top level, strengthening the application of artificial intelligence technology, increasing the construction of general model and developing the virtual reality integration test are proposed to improve the autonomous technology’s application speed and expand the operational scope of intelligent UAV.
Key words: military intelligence; artificial intelligence; UAV; autonomous operational ability; test and evaluation; autonomic rate; virtual reality integration test
猜你喜歡
西安航空學(xué)院學(xué)報(bào)(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
南風(fēng)窗(2016年19期)2016-09-21 16:51:29
南風(fēng)窗(2016年19期)2016-09-21 04:56:22
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26