基于無人機遙感影像的建筑物輪廓目標檢測系統設計
2021-01-07 04:55:36郭一江
計算機測量與控制 2020年12期
郭一江
(西南科技大學城市學院 建筑工程學院,四川 綿陽 621000)
0 引言
在低窄航攝圖上,高密度和高尺寸的城市建筑是復雜建筑輪廓的技術難點,不同高度、不同尺寸的房屋彼此不一樣,形成遮擋和陰影重疊部分也不一樣;由于拍攝角度的差異,使住宅輪廓圖很難從住宅輪廓圖上分離出來[1]。低空航空影像的分辨率為0.2~0.3 m,存在分辨率較低的問題;而高分辨圖像雖然提供了更詳細的信息,但它也很難從大量信息中提取有用的部分[2]。
以往的目標檢測系統采用 CCD成像元件。半球形美觀,緊湊,有一定的隱蔽性,一般掛在天花板上,可根據需要轉動[3]。使用該元件成本較低,但沒有固定角度和一定距離的旋轉變焦功能,需要結合使用大量的場地,實際觀察效果較差;設計基于動態掃描檢測系統,掃描器連接到降落傘上,鏡頭的光軸與垂直方向呈一定角度[4]。掃描器均勻地垂直下降,同時使地面景物繞垂直線旋轉[5]。降速較慢,經一次旋轉后,螺紋徑向偏移量較小,只能將單圈動態圖像處理為靜態圖像。以上兩種系統都會受到噪聲因素影響,所得到的建筑輪廓棱角往往不清不準。為此,設計了一種基于無人機遙感影像的建筑物輪廓目標檢測系統。利用無人機遙感影像具有智能化的特點,能夠收集人類無法收集到的信息。使用該系統時間短,可以彌補傳統系統中建筑輪廓信息的不足,實現建筑物輪廓目標的精確檢測。
1 系統總體架構設計
系統設計時,要考慮到設備主體結構、系統硬件平臺以及系統智能友好顯示界面。根據以上要求,首先在主體結構設置上,要求在不更換現有設備情況下,可以對不同高度建筑物進行輪廓檢測;其次在系統硬件平臺設置上,由于所建環境復雜,需要選用工業專用工控設備,保證軟件穩定運行[6-7]。
對于系統界面顯示方面,需要能夠顯示建筑物角落,并在界面上直觀地顯示出角落所需數據,同時還要保存每一次收集數據,查詢歷史,便于日后使用[8]。
為更好地實現工程設計目標,系統主要分為兩個主要模塊:數據采集模塊和數據處理與顯示模塊。
系統總體框如圖1所示。
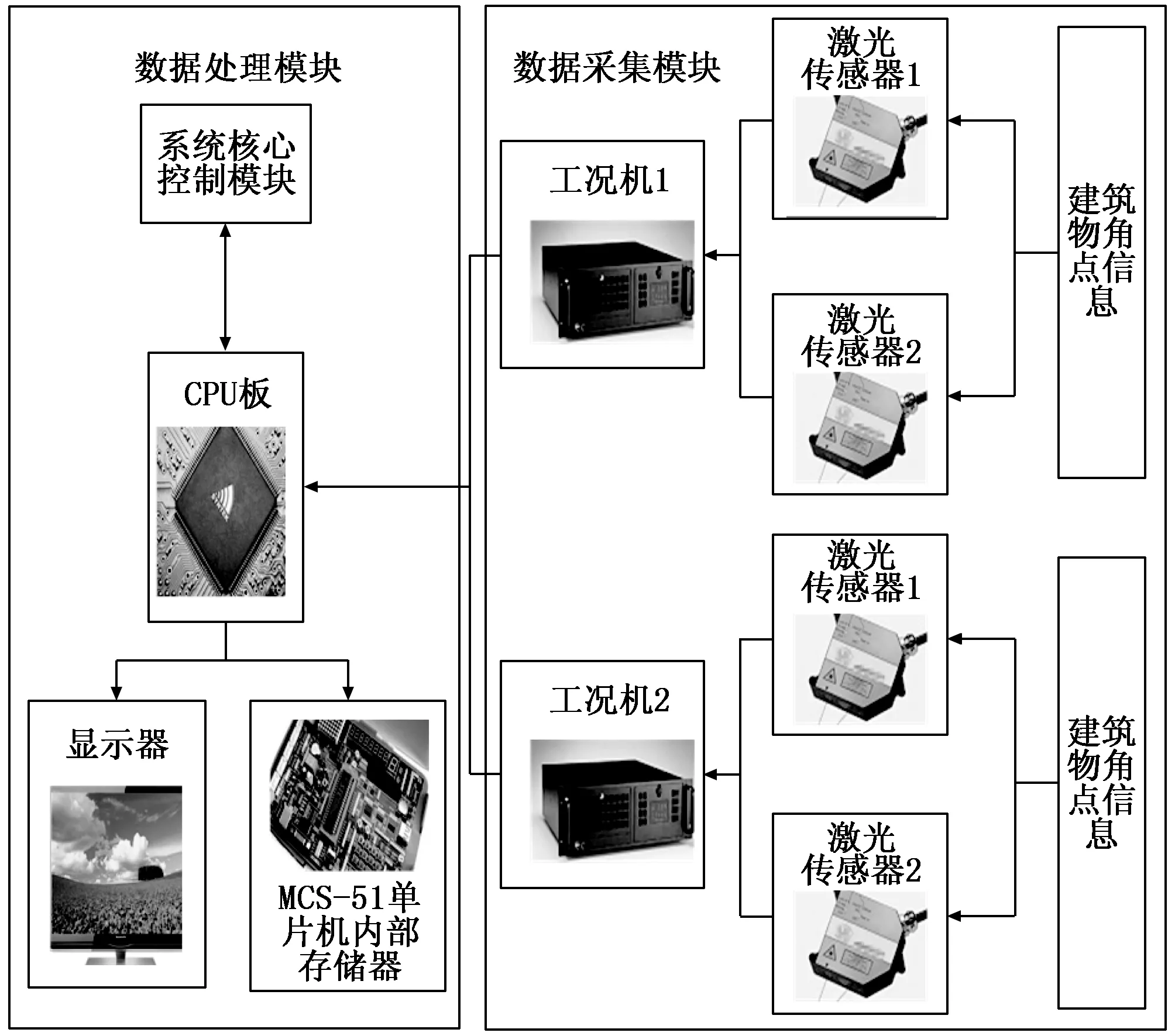
圖1 系統總體框架圖
數據采集模塊主要功能是控制一對激光輪廓傳感器,通過工控機采集建筑物角度信息,并通過以太網將傳感器采集輪廓數據組合在一起,傳送到各個部件[9-10]。數據處理與顯示模塊主要用于記錄各個角點位置信息,并與工業計算機直接通訊,向其發送和接收數據;收到數據后,需要處理建筑輪廓信息,并將數據保存到模塊中[11]。
2 硬件結構設計
2.1 采集模塊設計
用TLC2543A/D轉換芯片實現了模數轉換,由計算機完成數據采集;TLC2543是 TI公司近幾年推出的一種12比特/秒轉換芯片[12]。該方法轉換速度快,分辨率高,穩定性好。利用開關電容逐次逼近技術實現了 A/D轉換,與單片機接口簡單兼容[13]。盡管TLC2543具有串行外圍接口和單片機接口,但它不具有 SPI。
因此,TLC2543編程要點是控制字從數據輸入終端連續輸入8位數據,其中前4位決定通道編號;后4位決定輸出數據長度和格式[14]。盡管TLC2543是一種12位 a/D轉換芯片,但由于TLC2543具有8位、12位和16位的輸出數據長度,因此需要輸出12位以保證數據的準確性和簡潔性[15]。
TLC2543的內部寄存器在編程方面包括一個輸入數據寄存器和一個輸出數據寄存器。以TLC2543為接口,結合SPI操作,完成 A/D數據采集。圖2給出了TLC2543接口及說明。
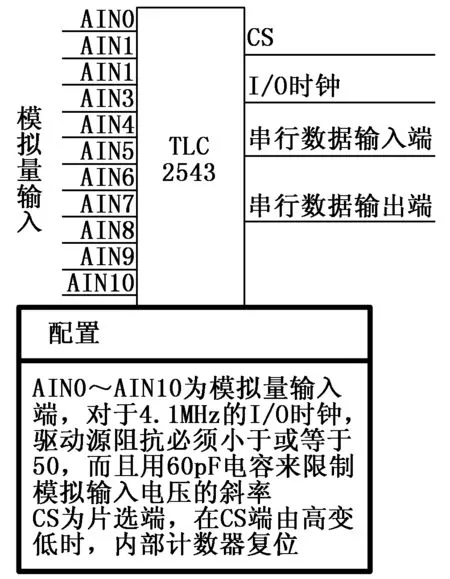
圖2 TLC2543接口及說明
在TLC2543和其它單片機之間只使用了4條線,根據單片機指令,當工作時間大于10 μ時,說明兩個工作周期完成。通過統計指令執行時間來判斷轉換是否完成,從而節省1條線。
2.2 激光傳感器
可用于制造測距儀和瞄準器,也可用于對位置信息進行測量。該系統包括激光、激光探測器和測量電路,采用半導體激光傳感器時,激光器發射二極管必須首先向目標發射激光脈沖。在目標反射激光之后,它向所有方向散射。在光學系統接收部分散射光后,返回到傳感器接收器之中,并在雪崩光電二極管上成像。雪崩光電二極管碰撞效應圖如圖3所示。
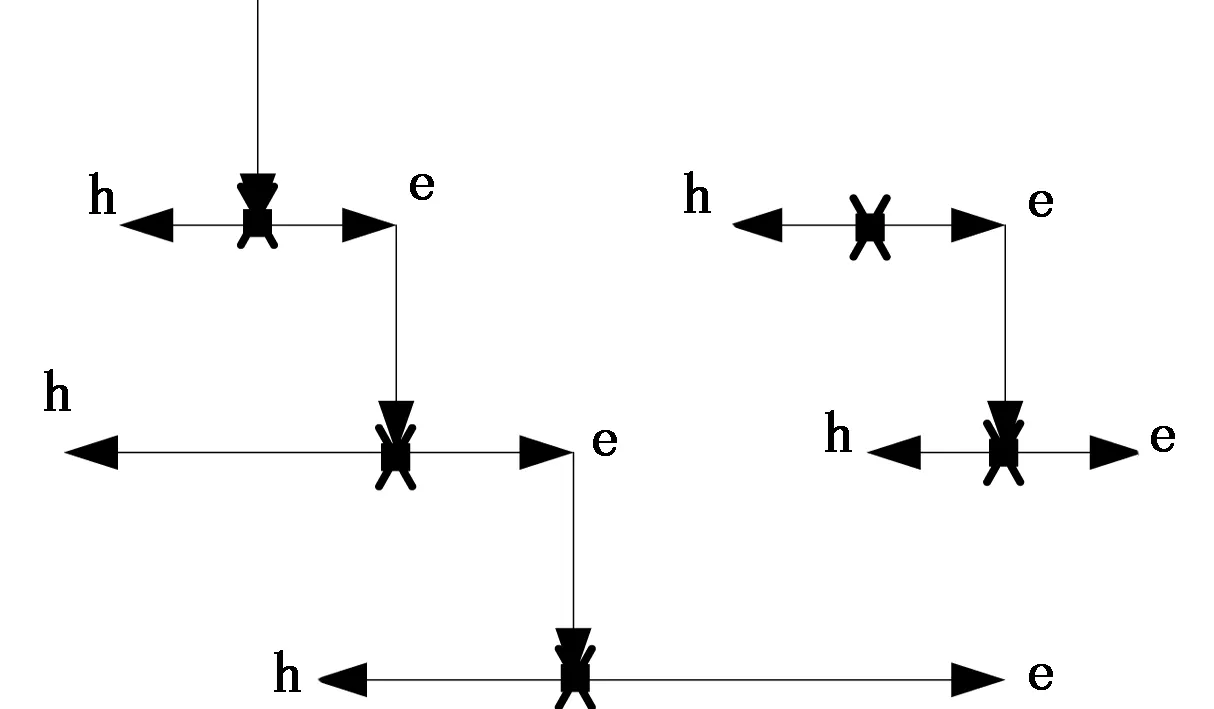
圖3 雪崩光電二極管碰撞效應圖
光生載流子(電子-空穴對)在雪崩過程中以較高的內電場高速運動,產生了光生載流子與晶格原子的大動能碰撞運動。在強電場作用下,原子電離產生次級電子-空穴對(h-e),從而獲得足夠的動能。這一進程類似于雪崩,離子化產生的載流子比光激發產生的要多得多,此時二極管輸出電流也隨之變大,提高了光接收靈敏度。雪崩光電二極管具有內部放大功能,在同樣的光強下,雪崩光電二極管的“倍增器”效應可以產生比普通光電二極管大幾十倍甚至幾百倍的光電流,能夠檢測非常微弱的光信號,并將其轉化為相應電信號。
2.3 MCS-51單片機內部數據存儲器
MCS-51具有64 kB的程序存儲空間,用來存儲諸如用戶程序、數據和表等信息。在單片機內部不存在 ROM,程序存儲器必須一端連接到64 kb的空間地址,另一端則必須接地,這就要求單片機強制 CPU從外部程序存儲器讀取程序。通過MCS-51單片機內部的 ROM,需將正常運行的程序傳送到高層,以便 CPU首先從內部程序存儲器讀取程序。
當PC值=1時,程序自動進入內部只讀存儲器空間;
當PC值=0時,程序從外部存儲器開始執行,該單片機管腳連接到低電平。
MCS-51單片機內部數據存儲器內部結構如圖4所示。
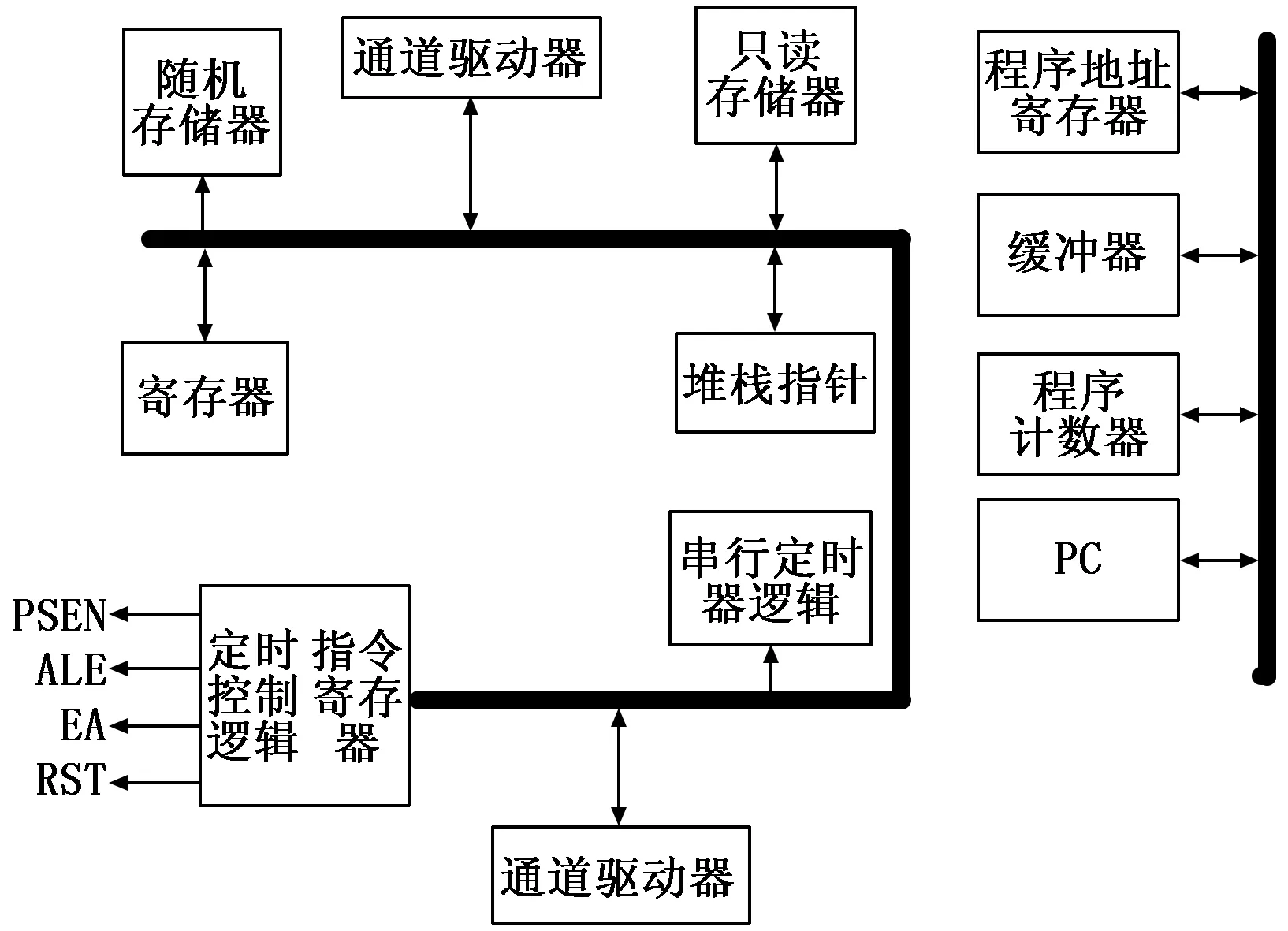
圖4 MCS-51單片機內部數據存儲器結構
中央處理器是整個單片機的核心,此8位寬處理器能處理8位二進制數據或編碼,負責協調整個單元系統的控制、命令和調度,完成數據存儲控制工作。在數據存儲器中有128個8位用戶數據存儲單元,能夠統一處理,對于私有注冊表只能存儲控制指令數據,用戶只能訪問。如此,用戶只能使用128個 ram來存儲讀取和寫入數據;該程序具有4 096個8位掩碼,用于存儲用戶程序;計數器/計數器具有兩個16位可編程定時器,用于實現定時控制程序;時鐘電路的最高頻率為12 MHZ,能夠產生并在整個單片機脈沖序列上運行。
2.4 CPU板
選擇371-4615型號CPU板,其是控制整機協調的中心,它由操作員和控制器組成。分機控制板與繼電板內部控制協調運行,PCM交換及存儲工作參數,并對外聯絡計算機和打印機以協調工作。
底板裝在箱體中,是微機中最基本部件之一,屬于開放式結構;主機板一般采用矩形電路板,這是計算機的主要電路系統,通常有I/O控制芯片、控制開關接口、6~8個擴展槽、主機板和主機板直流電源連接器及其他組件。替換擴展槽插卡后,CPU板上的其他部分進行了部分升級,使廠商和用戶在配置方式上都有了更大的靈活性。
3 軟件功能設計
基于無人機遙感影像的建筑物輪廓目標檢測流程如圖5所示。
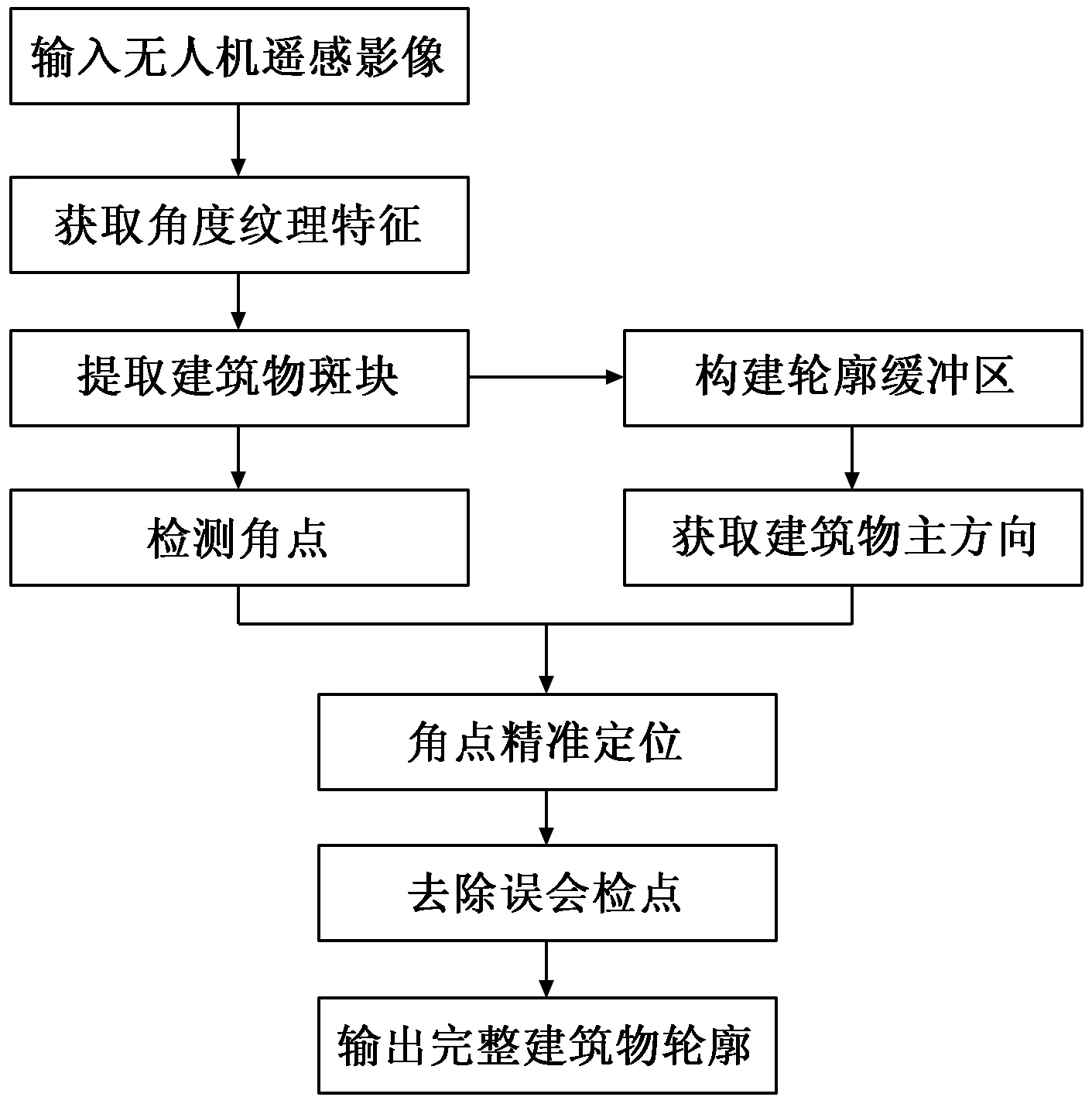
圖5 建筑物輪廓目標檢測流程
依據該流程可知,需先分析半導體激光測量原理,再對各個步驟進行具體設計。
3.1 半導體激光測量
采用激光三角法測量方法,其原理如圖6所示。
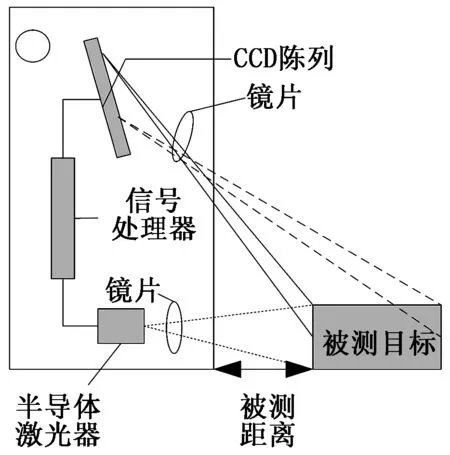
圖6 激光三角法測量原理
通過透鏡,半導體激光器聚焦于被測建筑物的輪廓目標,透鏡3負責收集反射光,并把其投影到 CCD陣列4上;信號處理器5利用三角法計算光點在陣列4上的位置,從而得到與目標建筑物之間的距離。激光器通過鏡片向物體表面發射可見紅色激光,物體反射的激光器通過接收鏡片由內置的CCD線性攝像機接收。
基于已知激光到攝像機的距離,可計算出傳感器到被測物體距離,該過程所需時間間隔t,由此計算待測建筑物輪廓目標距離為X:
(1)
式(1)中,v為光速。濾光片可以減少檢測背景環境影響,降低輸出信號背景噪聲。
3.2 建筑物斑塊提取
由于建筑物遙感圖像細節較多,其光譜特征與周圍環境差別較小,尤其是接近道路位置的輪廓,噪聲較大,同時又難以提取建筑物的信息,因此很難依靠建筑物的光譜特征區分輪廓信息與其它信息。為減小輸出信號背景噪聲,激光三角測量方法是必要的。
應用半導體激光傳感器對遙感影像進行角度紋理檢測,先去除邊緣不規則和微小誤差,再用面積生長法重新生長出建筑斑塊。該過程是腐蝕和膨脹的,因此,需通過結構元素運行,待測建筑物輪廓目標距離集合X被結構元素D所腐蝕,如下所示:
[εD(x)](x)=min{xD}
(2)
公式(2)中:[εD(x)](x)表示結構元素對集合進行腐蝕;xD表示集合X鄰域。該集合被結構元素膨脹表示如下所示:
[εD(x)](x)=max{xD}
(3)
經腐蝕性處理移除邊緣部分后,中心部為生長期種子點。該過程還應充分考慮顏色高度相似性,保證建筑邊緣盡可能接近直線,該過程稱為“圓周”。按照以下步驟來實現區域增長:
1)連續掃描圖像發現第一個像素尚未具有歸屬感,需要設置像素為(a0,b0);
2)設(a0,b0)為中心坐標,充分考慮到該中心點的4鄰域像素坐標(a,b),如果鄰域像素坐標符合增長標準,則將鄰域像素坐標和中心坐標合并在同一區域,同時將鄰域像素坐標壓入堆棧;
3)從鄰域像素坐標中隨機選取一個像素,并返回到步驟2);
4)當鄰域像素為空時,返回步驟1);
5)重復步驟1)和4),直至圖像中每一點都具有歸屬感,完成增長。
3.3 拐角點定位
受噪聲因素影響,所檢測的角點多為非建筑物角點,實際角點位置也存在不精準問題。為從這些候選角點中找出真正角點,并找到其真正位置,提出了一種排除非角點最小二乘模板匹配方式 :
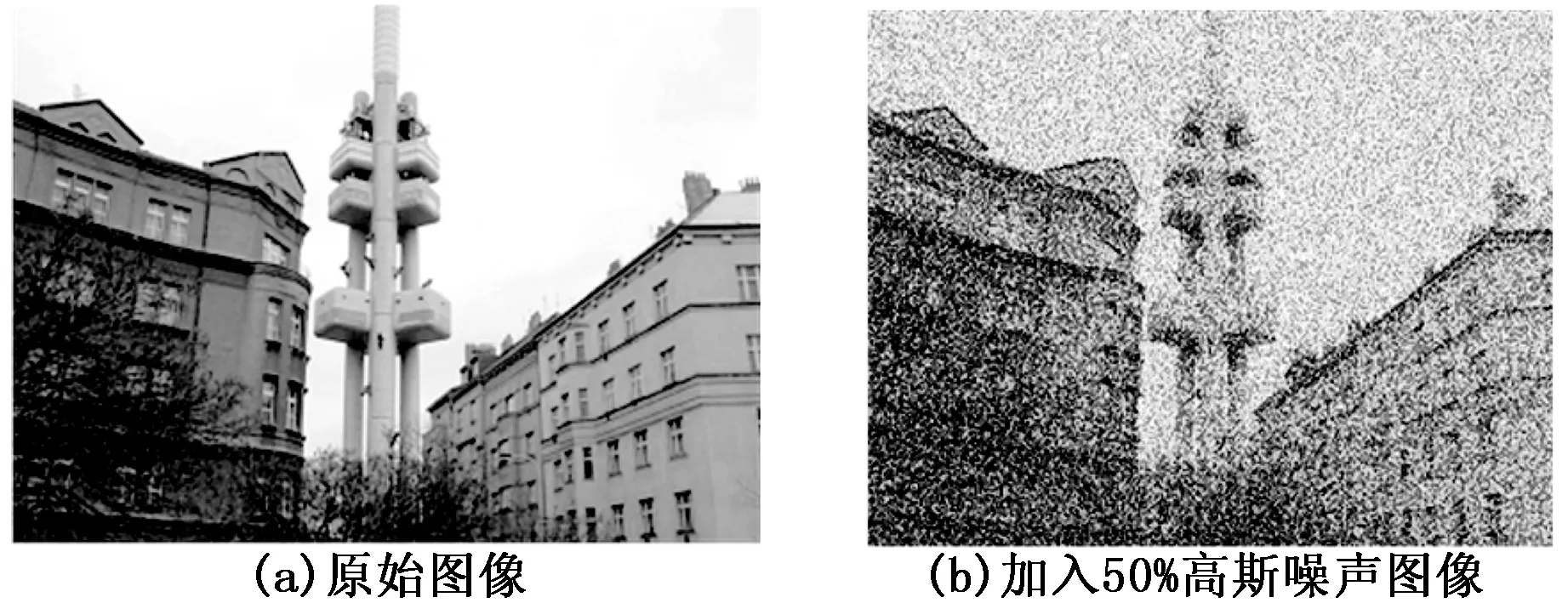
圖7 建筑物圖像
1)先用幾何畸變修正初始值;
2)重新提取斑塊信息,獲取下一次圖像匹配窗口;
3)設置相關系數λ和閾值η,根據兩者之間大小關系判斷迭代次數;
4)如果λ<η,則需修正參數,待修正完成后,返回到步驟1);
5)如果λ≥η,則圖像匹配窗口滿足λn+1<λn為止,記錄滿足上述條件的角點精準為止,隨之轉到下一個角點,由此獲取建筑物輪廓線,完成建筑物輪廓目標檢測。
4 實驗分析
為了驗證基于無人機遙感影像的建筑物輪廓目標檢測系統設計可行性,進行實驗分析。
根據 TensorFlow的深度學習框架,在Visual Question Answering 數據集(http://visualqa.org/)中選擇1 000張無人機遙感圖像被訓練到配備Inteli7-7700K CPU處理器上。經過手動標注圖像后,將校準過的信息和圖像以TFRecord格式輸入FasterR-CNN開始訓練。在15 000次迭代中,選擇Inceptionv2作為訓練網絡,初始學習率為0.001。受硬件條件限制,訓練批量選擇為1,不同學習率設置對訓練收斂速度有較大影響。若學習速率設置過大,那么損失函數損失將不收斂;若學習速率設置過小,那么會產生局部最優解,影響實驗結果精度。因此,在損失趨于穩定時增加學習速度。如表1所示。
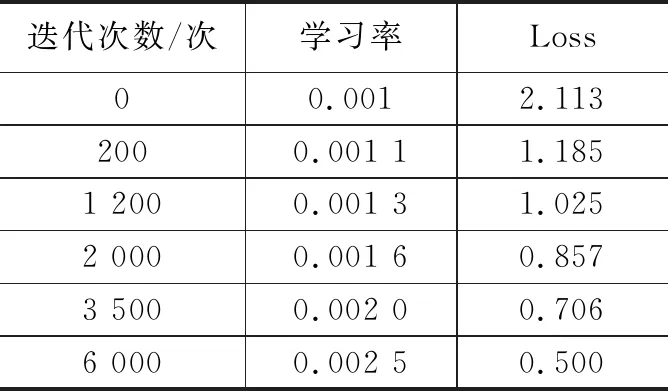
表1 學習率變化
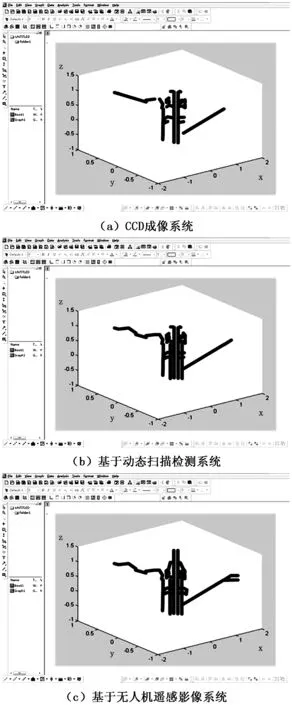
圖8 三種系統輪廓檢測對比結果
在上述內容支持下,以圖7所示為基礎,進行輪廓信息檢測實驗。
對于上述圖像,分別采用CCD成像系統、基于動態掃描檢測系統和基于無人機遙感影像系統檢測建筑物輪廓,具體對比內容如圖8所示。
由圖8可知:采用CCD成像系統沒有固定角度,且受到50%高斯噪聲影響,導致建筑物輪廓邊緣線檢測不完整;使用基于動態掃描檢測系統,經掃描后,角度自動生成,偏移量較小,也受到50%高斯噪聲影響,導致建筑物輪廓邊緣線檢測也不完整;使用基于無人機遙感影像系統雖然不能將全部輪廓線條檢測出來,但可大致確定建筑物輪廓和拐角,能夠如實反映建筑物的外形。由此可知,基于無人機遙感影像的建筑物輪廓目標檢測系統設計是具有可行性的。
5 結束語
針對無人機遙感影像中建筑物斑塊提取的正則化問題,利用無人機遙感影像變換分割后的建筑物輪廓線,確定主要建筑物方向,并以輪廓線為導向確定建筑物角度。建筑的規則輪廓是由各個角點結合而成的。該系統能減小噪聲影響,找出建筑物的拐角,并能較好地反映建筑物的外形。
值得注意的是,該系統的檢測結果受建筑物本身及周圍環境特征影響較大。這是因為使用了無人機遙感技術檢測出不匹配點的數目。在刪除操作之后,仍然有一些不匹配點無法刪除,從而導致建筑輪廓的局部不規則性。今后,將著重于研究這些問題,以實現大規模精確提取和標準化建筑輪廓。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45