基于GEO的低軌航天器星間通信鏈路控制系統設計
2021-01-07 04:55:58孫鶴鋒周學軍
計算機測量與控制 2020年12期
孫鶴鋒,周學軍
(延安大學 物理與電子信息學院,陜西 延安 716000)
0 引言
近幾年航天工業有了長足的發展,包括如人類空間和探月高新技術也在不斷發展,因此低軌道的飛船數量和種類大量增加。
有些大型的低軌道航天器需要下載大量的各種科學實驗數據[1],而傳統的低軌道航天器則相對簡單。從衛星上下載的信息通常依靠衛星之間的鏈路傳送到地面的全球站。這種方式會受到衛星數量、衛星成本等多方面因素的影響[2-3],為此就需要拓展新型、高效的傳輸方式,解決這類低軌道航天器所面臨的海量科學實驗數據的實時下載問題。
通過研究國內外文獻得知,低軌航天器可以采用一種新的基于靜止軌道(GEO)通信衛星轉發的傳輸方式,即利用 GEO通信衛星向地面轉發信息[4-5]。由于 GEO通信衛星在低軌航天器中傳輸困難,主要原因是上下行帶寬不對稱,可用鏈路時間有限,拓撲結構變化頻繁,難以達到傳統地面網絡技術所能達到的服務質量和可靠性要求[6]。本文在研究網絡架構的基礎上,設計了一種新的低軌航天器星間通信鏈路控制系統,對系統的硬件和軟件進行研究,并通過實驗研究了系統的可行性。
結合國內外相關文獻,提出了近低軌道航天器可以在地球同步軌道通信衛星傳輸的基礎上,采用一種新的傳輸方式,即利用地球靜止軌道(GEO)通信衛星將信息傳送到地面。GEO通信衛星在低軌道航天器中存在傳輸困難、上下帶寬不對稱、可用鏈路長度有限、拓撲結構多變等問題,無法滿足傳統地面網絡技術對服務質量和可靠性的要求。本文基于網絡結構的研究,設計了一種低軌道航天器星間通信鏈路控制系統,研究了該系統的硬件結構和軟件結構,并對其可行性進行了實驗研究。
1 基于GEO的低軌航天器星間通信鏈路控制系統硬件設計
基于GEO的低軌航天器的星間通信主要通過星間通信鏈路進行數據傳輸,基本原理如圖1所示。
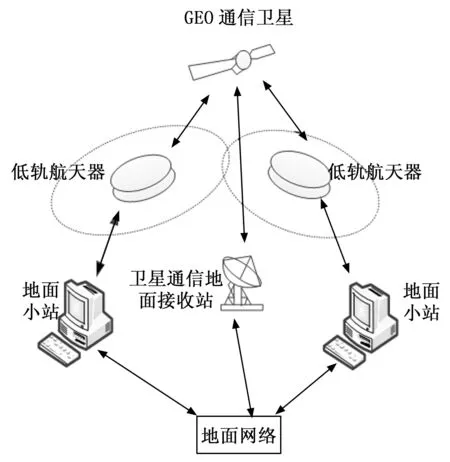
圖1 基于GEO的低軌航天器星間通信鏈路示意圖
該鏈路由地面信號接收站、GEO 通信衛星低軌航天器、地面及衛星通信網絡鏈路等組成。低軌航天器分布在衛星和地面接收站之間,因此,低軌航天器有兩種渠道可以進行信息的傳輸:第一,通過和通信衛星之間的鏈路將信息傳給衛星,再由衛星傳輸給地面接收主站;第二則是直接傳輸給對接的地面接收站[7-8]。
從圖1中可以看出,低軌航天器在空間中是不斷運行的低軌節點,因此,通信鏈路相對具有一定的空間移動范圍和動態捕捉功能,以便能夠實時與低軌航天器進行對接和信號傳輸[9-10]。
一般大型低軌航天器數據傳輸數量規模較大,需要依靠星間通信鏈路和通訊接收站等將信息層層下傳傳輸到地面。這個過程會受到空間衛星數量、鏈路傳輸能力和通信接收站儲存量等多方面條件限制。對此,針對傳統的星間鏈路系統設計存在的問題,本文對低軌航天器的星間鏈路傳輸系統硬件設施進行了改造設計。
星間鏈路的主要設備大致包括星間信號發射器、信號接收傳感器、發射天線、接收天線和高增益天線等。本文改進的鏈路系統,首先通過運算程序提前將信號發射角度與距離計算出來,然后將空間信號發射器、接收天線按照計算結果進行角度和方位調整。這樣能夠使星間信號發射波束能更準確快速傳輸到下一個節點,減小方位誤差造成信號接收失誤的可能。
在發射器內部系統中,將設備通信編碼方式改為卷積編碼。在星間信號發射器上,通過卷積編碼程序對采集到的信息進行分析運算,得到解算篩選后的數據編碼,然后再進行信號數據傳輸。這種二次數據代碼編譯方法降低了信號數據的復雜和混亂程度,使星間通信鏈路接收到錯誤數據代碼的概率下降,同時也使鏈路通信的效率更高。星間鏈路的設計思路如圖2所示。
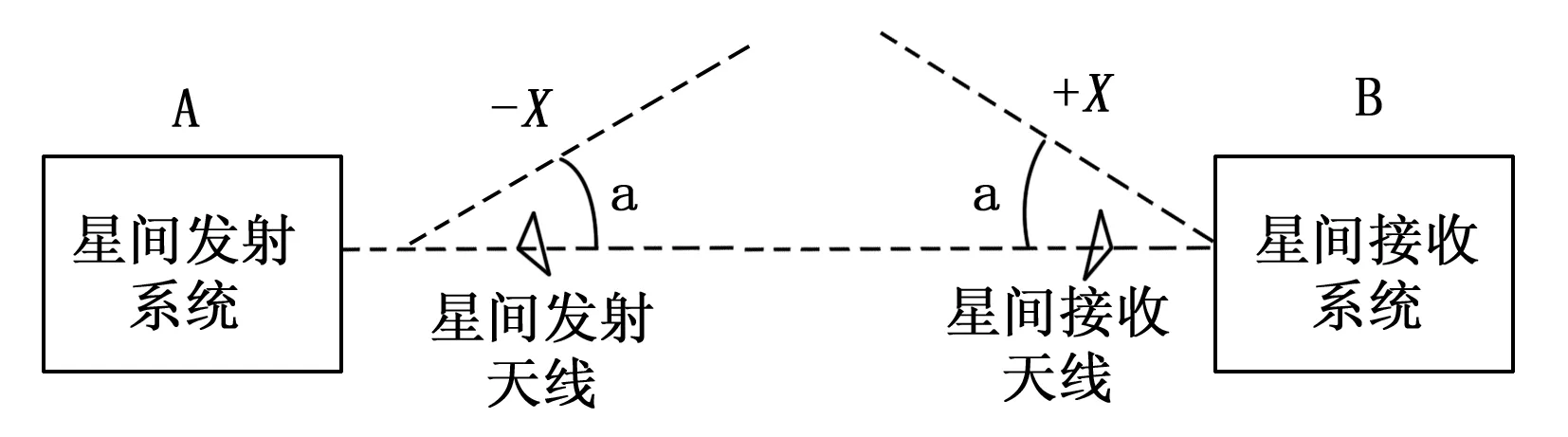
圖2 星間鏈路設計思路
圖2為本文設計的星間發射系統、接收系統與接收天線的安裝結構[11]。假設A為星間鏈路的發射系統,B為星間接收系統,在進行系統安裝設計時,計算發射信號波束的角度和方位,將發射角度記為a,則發射系統天線調整角度為-X方向的a角度,星間接收系統天線的方位調整為+X方向的a角度,從而使星間天線處于一條水平線上,減少了信號方向迷失和環境干擾造成的誤差,使星間信號傳輸路徑更直接準確。
圖3是星間發射系統和接收系統的工作運行系統設計結構。星間發射系統對信息進行基本篩選分析之后,再通過卷積編碼程序進行數據代碼編譯重組,再通過擴頻設備對發射波束進行數據發散和方位調制,然后發射成型的信號波束,并通過信號過濾設施過濾雜余信號形成完整的發射濾波,在調整放大變頻和發射功率之后,信號波束即能通過星間發射天線向目標方位進行輻射傳輸。而星間接收器在星間接收天線接收到信號輻射后,通過系統內部降噪除雜,將信號數據放大并調整降低變頻,使信號穩定清晰,再對信號進行分解拓展,通過維特比譯碼對原始數據進行分析破譯,重組之后得到信號發射系統所要傳輸的具體信息[12-13]。

圖3 星間鏈路系統設計示意圖
2 基于GEO的低軌航天器星間通信鏈路控制系統軟件設計
空間網絡傳輸技術研究是低軌航天器空間鏈路通信系統軟件設計中的重要一環。針對空間網絡所具有的動態性、不穩定性和資源有限等問題,基于GEO通信衛星低軌航天器運行軌跡和數據傳輸的特點,實現在低軌航天器網絡協議自由轉換[14]。
雙協議棧傳輸系統設計的主要內容包括以下幾個方面:
1)星地鏈路協議設計。由于低軌航天器向地球傳輸信息時容易受到大氣環境、地面遮蓋物和磁場引力等影響,會導致地面接收到的信息出現遺漏缺失等誤差,因此,不僅要在星間也要在星地之間設計雙協議棧,減少低軌航天器高速運動和外部環境等因素造成的影響,以保證向地面傳輸的數據信息更加完整可靠。
一般低軌航天器與地面接收站的距離較遠,且位置并不固定,動態性較強。SCPS-TP傳輸協議能夠減少空間通信傳輸時間延長、數據錯誤率高等現象,而且針對動態運行的低軌節點,能夠更好地完成信號對接與數據傳輸。
2)星間鏈路協議設計。星間鏈路通信環境相對比較統一,受到意外干擾因素較少,但星間鏈路進行數據傳輸的延時性較大。因此,選擇在縮短延時方面比較有優勢的LTP協議,作為星間鏈路配置的協議。低軌航天器雙協議棧傳輸系統設計示意圖如圖4所示。
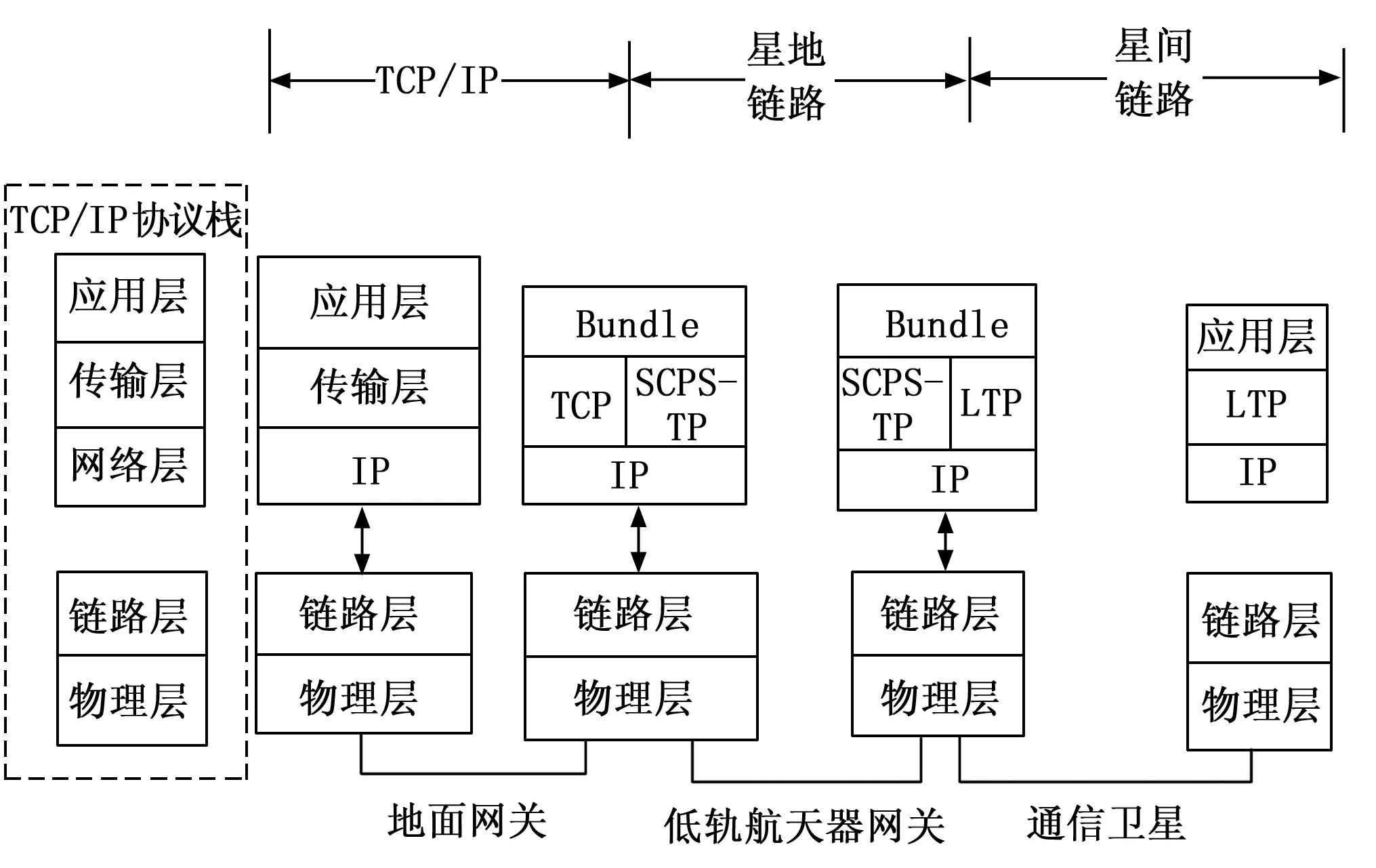
圖4 雙協議棧傳輸系統設計示意圖
如圖4所示,在裝置了雙協議棧的低軌航天器傳輸信息時,首先要采集并檢測所傳輸信息的下一站節點,判斷航天器是向通信衛星傳輸信息,還是向地面接收站傳輸信息[15]。若下一站節點是通信衛星,那么啟動LTP協議配置;如果下一站節點是地面接收站,則啟動SCPS-TP協議配置。兩種協議能根據信息傳送的不同對象進行靈活轉換,極大地提高了數據傳輸的準確性和時效性。
對于地面網絡接收系統,采用Bundle+TCP/SCPS TP+IP網關協議棧,實現這兩種協議在地面網絡實現自由的轉換。地面網絡接收星間傳輸信號時,Bundle層需編寫相應的 SCPS-TP匯聚程序才能與SCPS-TP協議進行信號通信;同樣,需要通過相應LTP匯聚層系統程序實現星間通信。
星間鏈路與地面網絡進行通信之前,需要根據該地面網絡的Bundle層服務配置對傳輸信息進行調整,使數據符合Bundle協議的接收型號要求。再通過匯聚層程序對接收信號進行分類處理,傳交給地面TCP協議,根據協議要求檢測信號,若符合要求即可與星間通信設備進行通信鏈路對接和網絡搭建。建立好通信鏈路之后,Bundle層接收來自星間的數據信號碎片,接收完畢后通過數據組裝編譯程序形成完整的數據信息,并將其通過TCP協議傳輸給地面網關工作人員的服務器通信系統中。
上述內容是低軌航天器的星間鏈路與星地鏈路控制系統軟件設計的基本設計思路。由此可見,本文提出的雙協議棧傳輸通信軟件設計比傳統的星間通信鏈路控制系統軟件設計性能更優。
3 實驗結果與分析
為探討本文提出的基于GEO的低軌航天器星間通信鏈路控制系統的有效性,設計對比實驗。
3.1 實驗步驟及方法
利用終端PC和網絡損傷儀組成實驗環境,針對連接時間和斷開時間進行測試,分析協議的運行性能。設定的實驗環境如圖5所示。

圖5 實驗環境
根據圖5實驗環境,對低軌航天器星間通信鏈路進行控制,設定實驗參數,如表1所示。
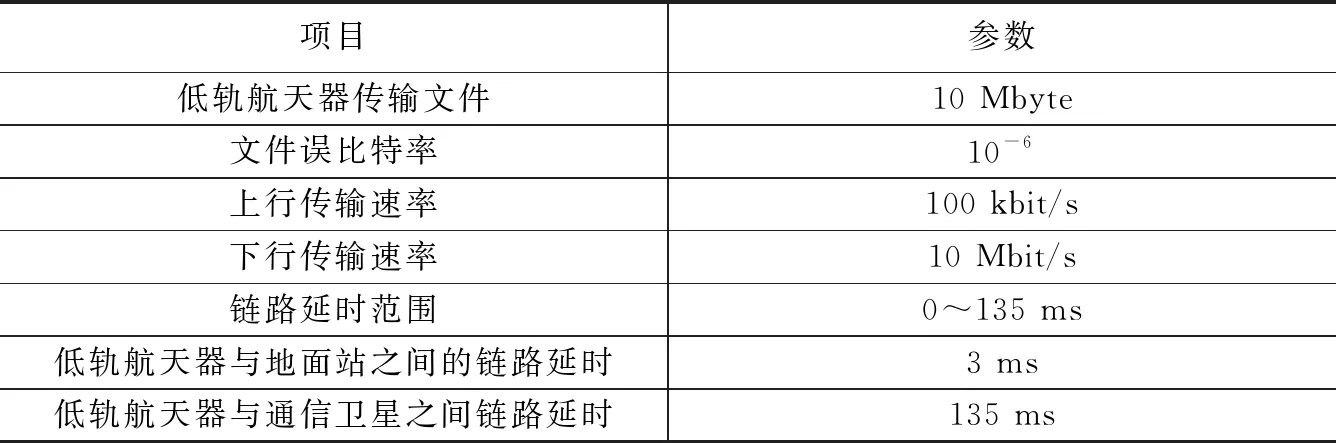
表1 實驗參數表
在誤碼率為10-6的條件下,分別使用本文提出的基于GEO的低軌航天器星間通信鏈路控制系統與傳統的基于天線跟蹤的低軌航天器星間通信鏈路控制系統、基于自擾控制器的低軌航天器星間通信鏈路控制系統對航天器進行控制,采集不同控制系統的傳輸速率,分析控制系統俯仰角和方位角的響應曲線,最后得到航天器星間鏈路的角速度、角加速度、角度指向的誤差曲線。
3.2 實驗結果分析
得到的傳輸速率如圖6所示。
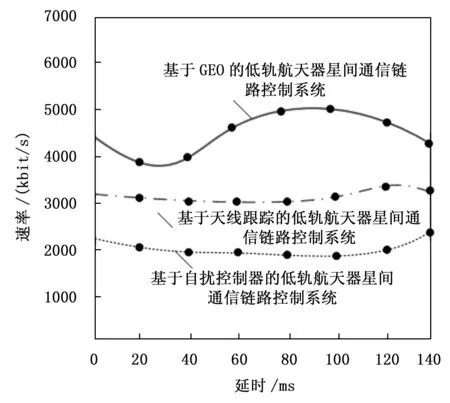
圖6 傳輸速率實驗結果
分析圖6可知,在誤碼率為10-6的情況下,本文提出的基于GEO的低軌航天器星間通信鏈路控制系統的下行平均傳輸速率為4.8 Mbit/s,傳統的基于天線跟蹤的低軌航天器星間通信鏈路控制系統的下行平均傳輸速率為3.1 Mbit/s,基于自擾控制器的低軌航天器星間通信鏈路控制系統的下行平均傳輸速率為2.7 Mbit/s.由此可見,本文提出的控制系統能夠有效提高低軌航天器對于信息的傳輸速率,加強信息傳輸能力。
在確定不同控制系統對傳輸速率的控制效果后,對星間鏈路通信現場進行實驗,針對A星和B星的鏈路通信進行控制,設定A星發射面為-X面,B星的接收面為+X面,天線在A星的上方位角為180°,在B星的上方位角為0°,在A星的俯仰角為0°,在B星的俯仰角為0°。使用不同的控制系統對低軌航天器星間通信鏈路間進行控制,分析不同系統下的俯仰角和方位角響應曲線,得到的實驗結果如圖7所示。
根據圖7可知,基于GEO的低軌航天器星間通信鏈路控制系統能夠有效分析不同鏈路之間的行駛軌跡,以平滑的模式處理各個模式,本文提出的方式針對俯仰角和方位角通道進行控制解耦。
通過圖7得到角速度、角加速度、角度指向的誤差曲線。
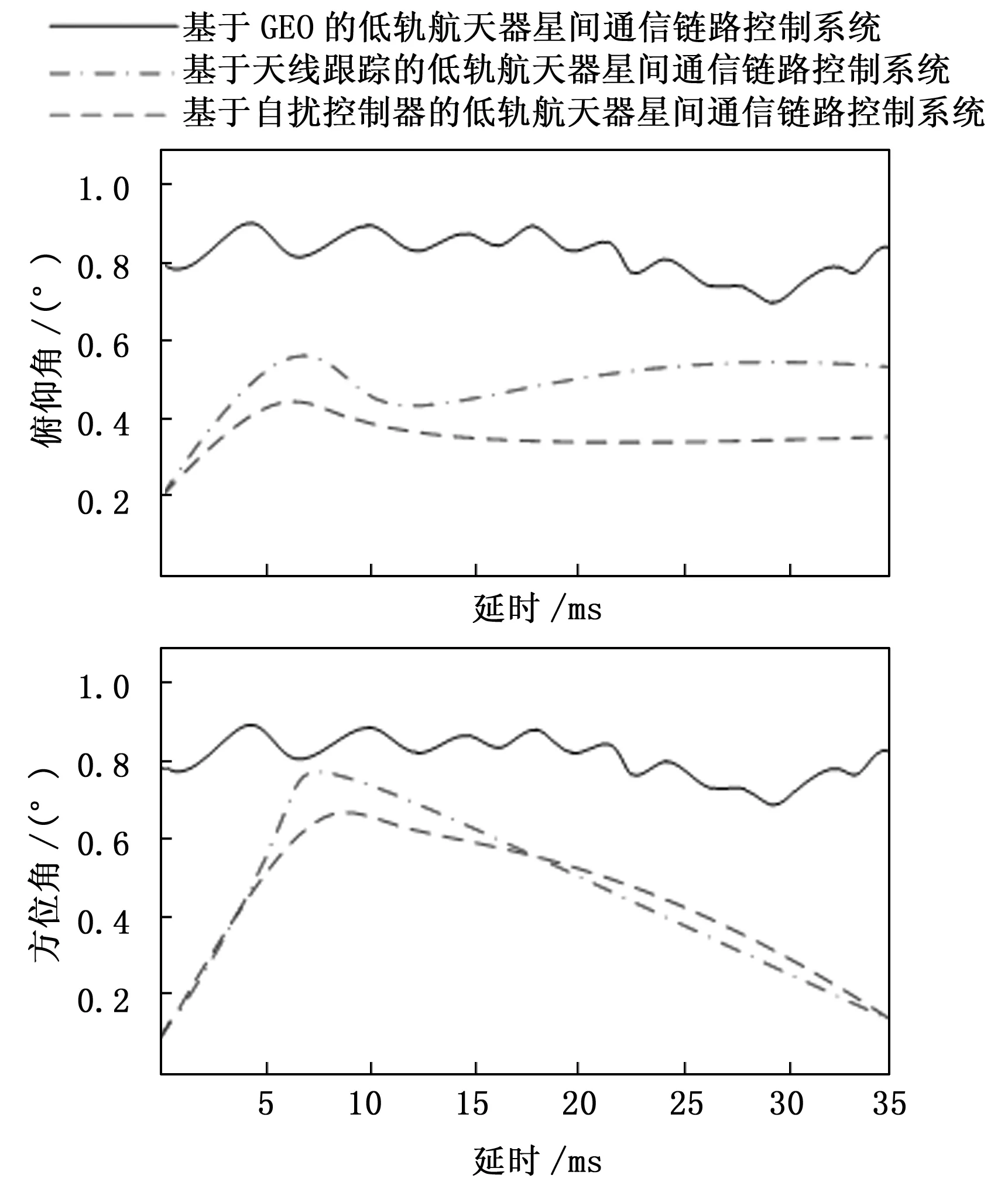
圖7 俯仰角和方位角響應曲線
分析圖8可知,本文提出的控制系統對于角速度誤差控制能力高于傳統系統。由于通信衛星體積相對較小,儲存與通信能力受到功率和衛星硬件設施質量等因素制約,低軌航天器與衛星之間的星間鏈路和通信傳輸也會受到相應程度的限制。因此,低軌航天器星間鏈路的發射器、星間天線、接收器等設備,按照計算調整好的角度方向進行安裝配置,并調整發射數據信號為窄信號波束,采用高增益的發射功率、卷積編碼和維特比譯碼等數據編譯重組程序,能夠使信號發射方向更準確,信號接收準確率更高,受到空間環境影響的情況大大減少。除雜系統的設計減少了多余信號對傳輸信息的干擾,通過二次編譯后的數據更準確可靠,錯誤代碼接收情況也得到了良好的改善。
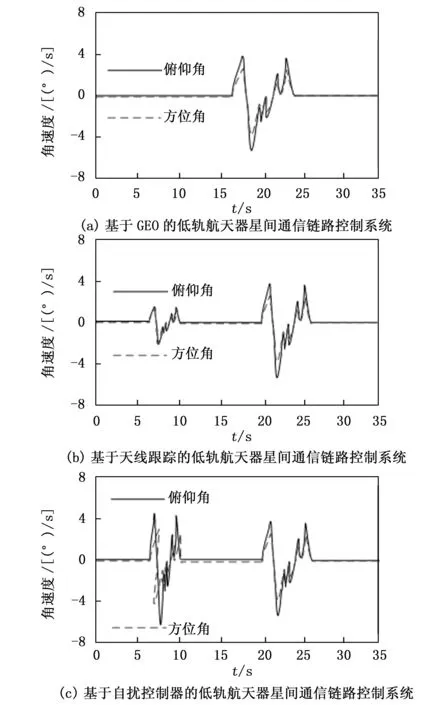
圖8 角速度誤差曲線
根據圖9可知,本文提出的控制系統通過雙協議棧技術,低軌航天器動態運行的不穩定性對通信鏈路和信號接收的影響得到良好改善;受空間環境、磁場等因素導致數據傳輸代碼錯誤的情況也大大減少,能夠很好地減少角加速度誤差。
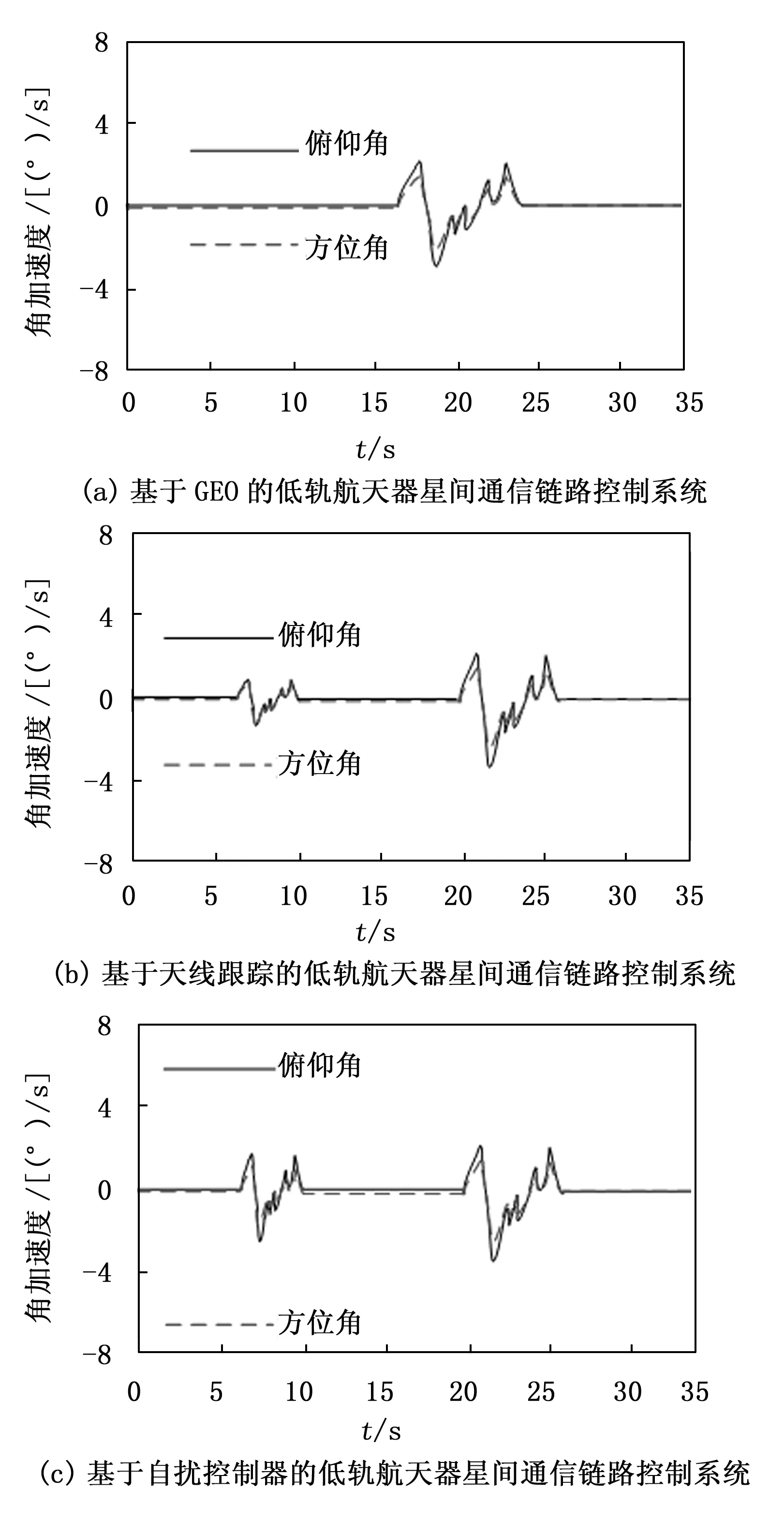
圖9 角加速度誤差曲線
由圖10可知,在跟蹤狀態下,不同的控制系統控制能力都很強,控制誤差能夠達到0.001°數量級,但是在穩態后,傳統的控制系統控制誤差過大,控制數量級在0.002°甚至更高。由此可見,本文提出的控制系統具有很強的指向控制能力,對內部控制參數的變化有很強的魯棒性,能夠抑制耦合干擾,實現高精度的控制目標。
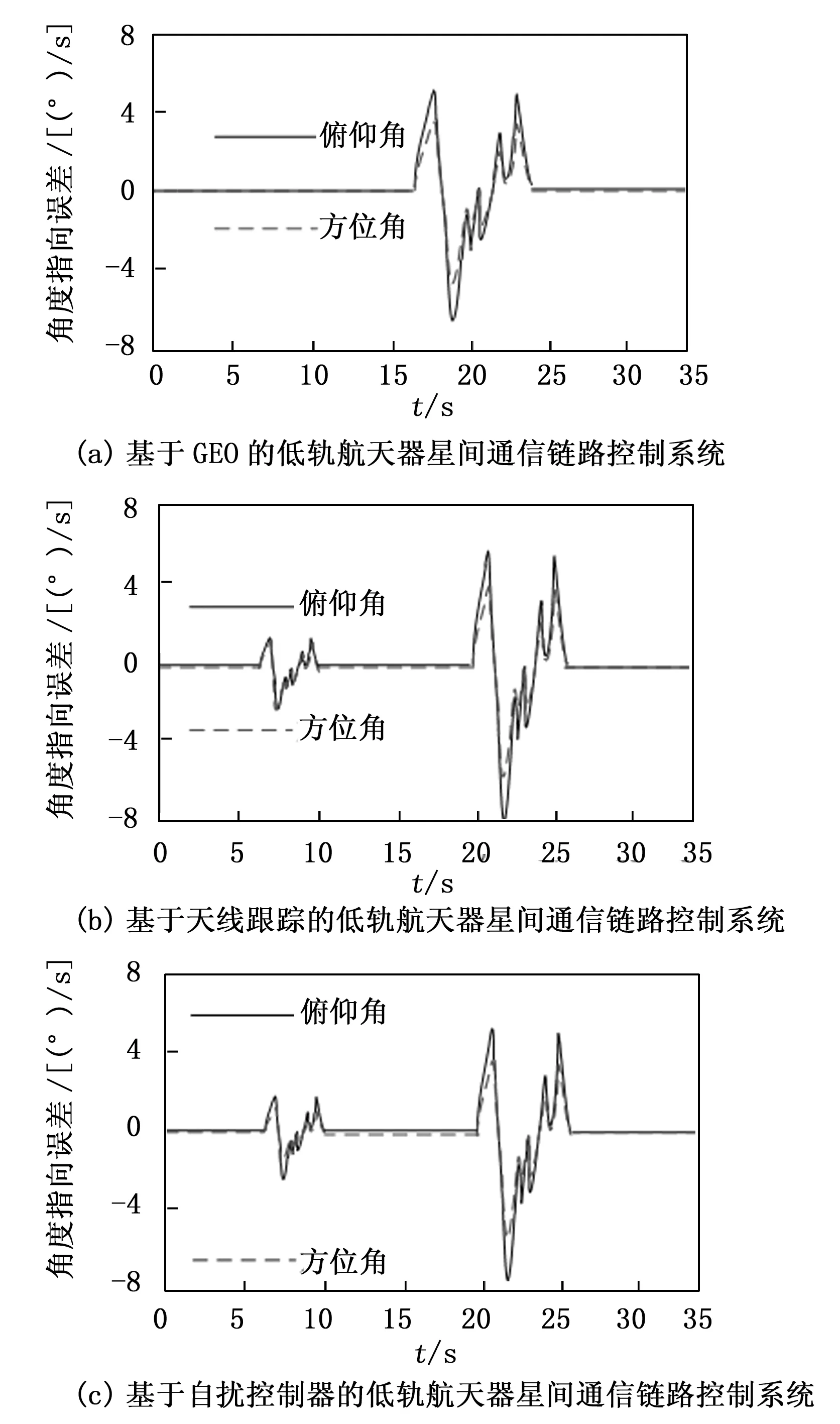
圖10 角度指向誤差曲線
綜上所述,所提方法的控制系統能夠在較短時間內達到穩態控制,指向控制能力較好,下一步將針對控制精度對所設計系統做出進一步完善,以期在穩定控制的基礎上提升低軌航天器星間通信鏈路控制的精度。
4 結束語
本文基于GEO設計了一種低軌航天器星間通信鏈路控制系統,在綜合分析了低軌航天器的可行性和傳輸能力后,探討傳輸性能。通過實驗驗證,本文提出的基于GEO的低軌航天器星間通信鏈路控制系統優于傳統系統,信息傳輸速率高于傳統系統傳輸速率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00