基于深度學習的大興機場地鐵線路剛性接觸網懸掛狀態檢測研究
2021-01-08 06:17:14白青林
工程技術研究 2020年21期
白青林
(北京市軌道運營有限公司,北京 102412)
為更好地滿足乘客需求,必須在現有技術與運行模式的基礎上對城市軌道交通進行優化[1]。北京大興機場線設計時速為160km,是全球時速最快的地鐵線路,是城市軌道交通一種新的突破。為保證地鐵的安全可靠穩定運行,需要牽引供電系統可靠工作,而剛性接觸網是系統的重要組成部分,也是實現機車可靠供電的關鍵部件[2]。
由于剛性接觸網隨著地鐵運行時間的延續,運行壓力不斷增加,其運行狀態下滑嚴重,從而導致不同類型的故障出現,因此需要對剛性接觸網進行實時檢測,為檢修維護提供重要支撐尤其重要。其中剛性接觸網的懸掛狀態檢測更是重中之重,剛性接觸網懸掛狀態將直接決定剛性接觸網的工作性能,進而影響弓網受流質量,若剛性接觸網懸掛狀態不佳,將會威脅地鐵的穩定運行[3-4]。
文章以北京大興機場線中的剛性接觸網為研究對象,基于圖像識別技術,引入深度學習理論對剛性接觸網懸掛狀態進行檢測,建立包含深度學習的剛性接觸網懸掛狀態檢測流程,并通過現場實驗,與傳統的圖像檢測方式進行對比來驗證該方法的準確性與優越性,從而為快速地鐵的剛性接觸網懸掛狀態檢測提供一種新的嘗試。
1 深度學習理論
1.1 卷積神經網絡
卷積神經網絡(Convolution Neural Notwork,CNN)作為四大深度學習模型之一,在計算機視覺領域有著廣泛的應用。CNN主要由三部分組成,第一部分為輸入層,實現原始圖像數據的輸入;第二部分由卷積層和池化層組成,實現對輸入數據的特征提取;第三部分由全連接層和分類器組成,實現全連接的多層感知[5-6]。
卷積層:對圖像和濾波矩陣做內積運算的過程稱為卷積操作。通過改變卷積層深度等參數實現圖像特征提取。卷積運算公式如下:

池化層:一般存在于連續的卷積層間,通過對輸入的特征圖進行“壓縮”來減小下一層計算量,避免過擬合。平均池化和最大值池化為常用的兩種池化方式,池化運算公式如下:

式中:down函數為下采樣運算,將i-1層輸出特征圖xi分割為n×n的特征圖塊,并對其進行最大值或均值化處理,使得特征圖維度變為原始圖塊的1/n2。
全連接層:其一般位于CNN的尾部,作用是對整個網絡的特征進行線性組合,計算公式如下:

式中:Wij為i-1層的第i個節點和i層第j個節點間的權重;b為i層第j個節點的偏置。
1.2 CNN學習過程
CNN本質上為實現輸入和輸出間的映射,利用已知模式對CNN進行訓練,使其具有輸入輸出間的映射能力,整個學習過程和人工神經網絡類似,可歸納為向前傳播、反向傳播和權值更新部分[7]。
整個CNN的學習過程如下。(1)初始化網絡:對CNN的權重、偏置系數等參數進行隨機初始化;(2)向前傳播:將訓練樣本數據作為CNN輸入,獲得CNN的預測值;(3)誤差求解:計算實際值和預測值間的誤差;(4)反向傳播:根據所求解的誤差值,對各層網絡的權重和偏置的偏導數進行求解,實現對網絡參數的更新;(5)重復步驟2和4。
1.3 Faster R-CNN
Faster R-CNN算法是在改進Fast R-CNN的基礎上提出的,由于Fast R-CNN是通過選擇搜索算法實現候選框的特取,因此非常耗時[8]。而Faster R-CNN通過區域建議網絡(RPN)完成對候選框的特取,也可看成是RPN+Faster R-CNN的結合體,區域建議網絡采用卷積核為3×3的卷積層在特征圖上做滑窗處理,進而確定候選框的位置。
2 基于深度學習的剛性接觸網懸掛狀態檢測
2.1 剛性接觸網圖像獲取
剛性接觸網懸結構復雜,包含諸多部件,各部件雖然功能不同,但相互協作、相互耦合,共同保證了剛性接觸網的運行狀態。剛性接觸網的主要部件及功能如表1所示。
利用接觸網剛性懸掛監測裝置(4C),對地鐵運行軌道途中的剛性接觸網進行拍攝,所得到的剛性接觸網懸定位裝置、支撐裝置、接觸懸掛、附加懸掛等的實際圖像,為后續圖像處理、故障識別提供基礎。
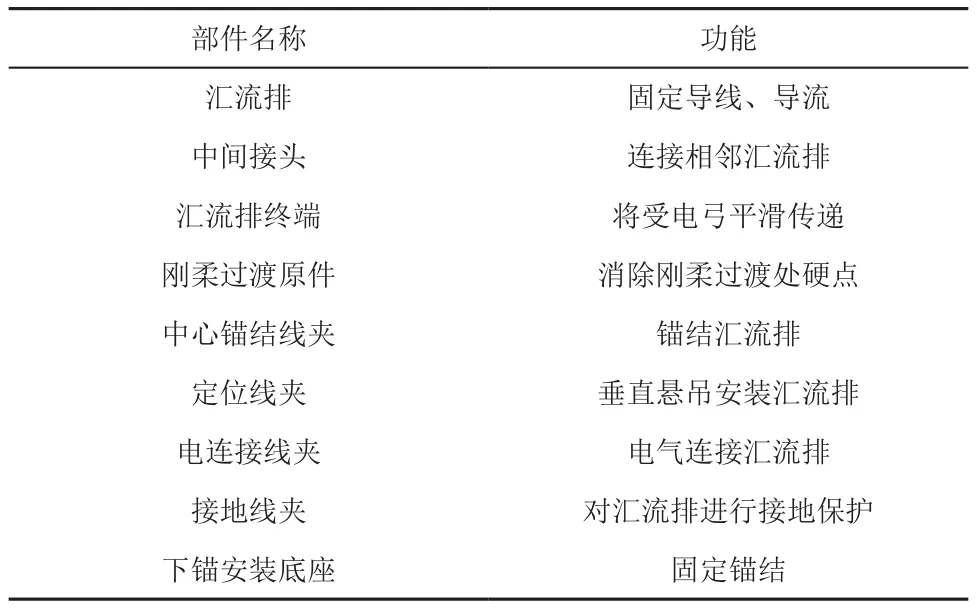
表1 剛性接觸網主要部件及功能明細表
2.2 懸掛狀態檢測流程
對剛性接觸網圖像中的故障進行識別需完成兩項工作,一是建立樣本模板,二是對圖像進行故障識別。具體流程如圖1所示。(1)待檢測圖像的采集:針對某鐵路路線,采集1500張圖像;(2)圖像預處理:對圖像進行像素處理,并對各位置進行框圖標注;(3)訓練集和測試集的劃分:劃分訓練集和測試集;(4)共享卷積層特征信息提取:將圖片數據輸入預訓練網絡,以此獲取圖片的特征圖譜;(5)區域建議:根據提取的特征,采用RPN網絡尋找相應數量的候選框圖;(6)分類和回歸:根據前向和反向傳播,完成網絡參數調整,并判斷部件類別。
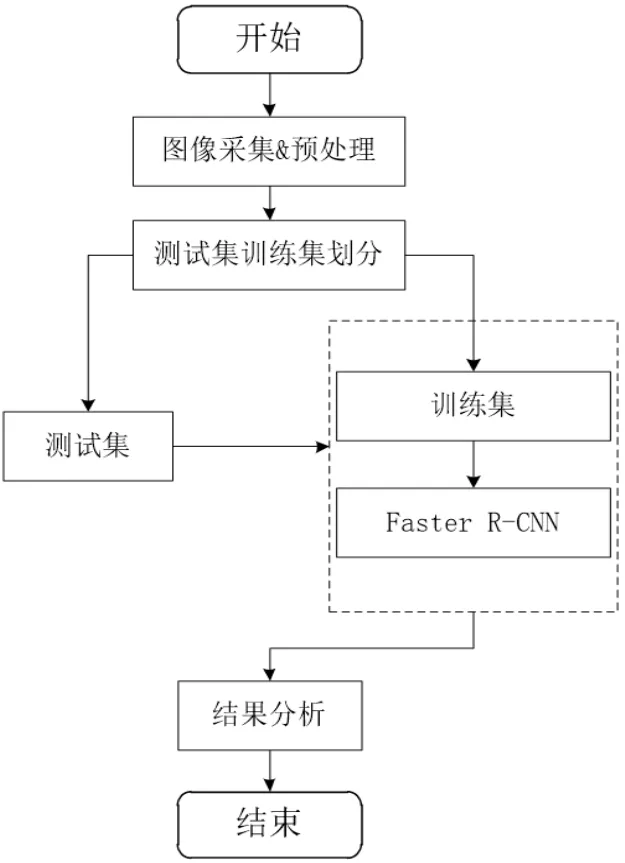
圖1 樣本建模實現流程
2.3 訓練策略的確定
Faster R-CNN算法需要對兩種不同任務的訓練模型進行訓練,交替訓練和近似聯合訓練是Faster R-CNN算法的兩種常用訓練方式。
交替訓練首先對區域建議網絡進行訓練,并將訓練好的參數作為Fast R-CNN的初始化參數,同時將RPN的輸出作為Fast R-CNN的輸入,通過多次迭代來訓練網絡。
近似聯合訓練為另外一種訓練模式,不同于交替訓練中分別對RPN和Faster R-CNN進行訓練的方式,由于每次隨機梯度下降迭代時,RPN產生的proposal在前向傳播時為固定值,因此可提前計算并設置該值,進而對Faster R-CNN網絡進行訓練。反向傳播時,將RPN的誤差和Faster R-CNN的誤差結合,并且對RPN產生的cls_score忽略不計,進而更新參數。該設置可以保證反向傳播時,網絡只能獲得一個解析解[9-10]。與交替訓練模式相比,近似聯合訓練模式具有內存較少、訓練時間短等優勢,故采用近似聯合訓練模式。
3 實驗與分析
3.1 樣本來源和預處理
選取北京線路大興機場線接觸網系統作為訓練對象,采集2000張4C高清、正常運行狀態下的圖像作為訓練樣本,分別選取另3條鐵路運營線路作為測試線路,各采集400張圖片作為測試樣本。同時,對標注過程中的一些模糊信息進行篩選,采用圖像處理技術(灰度處理、降噪處理等)豐富樣本數據。
3.2 參數設置
選用Caffe深度學習框架,其擁有較多經典模型,且方便在模塊基礎上根據需要進行擴展,同時還具有運行速度較快的特點。硬件運行環境為Intel CoreI5-6300HQ,NVIDIA GTX1050Ti,4G顯存。訓練樣本集為2000張,測試樣本集為400×3張。
3.3 實驗驗證
采用600張測試集輸入構建的檢測模型,測試檢測算法的結果,檢測效果如圖2所示。

圖2 檢測結果
由圖2檢測結果可知,基于深度學習的剛性接觸網懸掛狀態檢測算法能夠準確識別剛性接觸網懸掛裝置中的缺陷,600張故障圖片中,準確識別出389張故障圖片,故障識別率為64.83%,且計算速度較快。為驗證該算法的廣泛適用性,對各部件選取了25張具有明顯故障的圖片,對剛性接觸網懸掛裝置各部件缺陷故障識別率進行統計,對圖像進行識別,統計各部件的識別結果,統計結果如圖3和表2所示。

圖3 故障識別結果

表2 剛性接觸網主要部件故障識別率
由表2可知,針對剛性接觸網主要部件的故障識別率存在差異,具體可知對定位線夾、中心錨結線夾等部件的識別率較高,對中間接頭、接地線夾等部件的識別率較低,是后期優化檢測方法的重點;各部件故障檢測率的平均識別率為64%,與600張剛性接觸網故障檢測結果相近,表明檢測結果可信度較高。
為驗證基于深度學習的剛性接觸網懸掛狀態檢測算法的優越性,設置實驗,將本算法同應用廣泛的YOLO、SSD目標檢測算法進行了對比,選取400張測試圖像,測試結果如表3所示。

表3 不同檢測算法下的定位結果
由表3可知,文章采用的基于Faster R-CNN模型的目標檢測算法與YOLO算法、SSD算法相比,定位精度分別提高了8%和4%,體現了本算法的優越性。
4 結論
文章介紹了一種基于深度學習的剛性接觸網懸掛狀態檢測算法。測試結果表明,基于Faster R-CNN模型的目標檢測算法定位精度分別比YOLO算法和SSD算法提高了8%和4%,具有較好的準確性和運行效率。同時,針對不同線路的采集圖像進行測試,檢測結果表明不同線路下,此方法均能較好地定位六大區域部件,具有較好的通用性,為快速地鐵的剛性接觸網懸掛狀態檢測提供了一種新的嘗試。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
