基于運(yùn)動(dòng)軌跡圖形擬合的輔助人體側(cè)翻機(jī)構(gòu)設(shè)計(jì)研究
2021-01-11 13:51:12倫慶龍徐曉鐘樊瑜波
圖學(xué)學(xué)報(bào) 2020年6期
蘇 鵬,盧 達(dá),倫慶龍,李 劍,徐曉鐘,樊瑜波,3
基于運(yùn)動(dòng)軌跡圖形擬合的輔助人體側(cè)翻機(jī)構(gòu)設(shè)計(jì)研究
蘇 鵬1,2,盧 達(dá)1,倫慶龍1,李 劍2,徐曉鐘1,樊瑜波2,3
(1. 北京信息科技大學(xué)機(jī)電工程學(xué)院,北京 100192; 2. 國(guó)家康復(fù)輔具研究中心民政部康復(fù)輔具技術(shù)與系統(tǒng)重點(diǎn)實(shí)驗(yàn)室,北京 100176; 3. 北京航空航天大學(xué)生物醫(yī)學(xué)工程高精尖創(chuàng)新中心,北京 100191)
仰臥位側(cè)翻是長(zhǎng)期臥床患者有效預(yù)防壓力性損傷病癥的有效措施之一,研究人體運(yùn)動(dòng)機(jī)理并進(jìn)行輔助人體仰臥位側(cè)翻機(jī)構(gòu)的擬人化設(shè)計(jì)具有重要意義。人體肩部和臀部是輔助仰臥位側(cè)翻較為關(guān)鍵的施力位置,基于人體解剖學(xué)分析肩部和臀部骨骼的空間運(yùn)動(dòng),建立運(yùn)動(dòng)標(biāo)記模型,并進(jìn)行人體仰臥位側(cè)翻運(yùn)動(dòng)捕捉實(shí)驗(yàn),得到肩部和臀部的運(yùn)動(dòng)軌跡圖形與連桿模型特征信息。通過(guò)分析連桿長(zhǎng)度和角度的變化過(guò)程進(jìn)行圖形幾何分析與連桿機(jī)構(gòu)簡(jiǎn)化,基于運(yùn)動(dòng)軌跡圖形擬合的輔助人體側(cè)翻機(jī)構(gòu)構(gòu)型,并對(duì)機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)仿真分析,運(yùn)動(dòng)仿真結(jié)果和實(shí)驗(yàn)圖形的擬合誤差較小,驗(yàn)證了所提出的輔助人體側(cè)翻機(jī)構(gòu)擬人化設(shè)計(jì)方法的合理性,相關(guān)研究結(jié)果可為人-機(jī)運(yùn)動(dòng)協(xié)同性輔助側(cè)翻康復(fù)輔具的設(shè)計(jì)提供理論依據(jù)。
側(cè)翻;運(yùn)動(dòng)捕捉;運(yùn)動(dòng)軌跡;圖形擬合;機(jī)構(gòu)構(gòu)型
壓力性損傷(即壓瘡)是皮膚表面由于摩擦、剪切、壓力和過(guò)度扭曲等因素造成深層組織損傷或皮膚淺層缺血的一種現(xiàn)象,其在長(zhǎng)期臥床患者人群中尤為常見(jiàn),已成為臨床中造成經(jīng)濟(jì)損失最大的病癥之一[1-2]。預(yù)防壓瘡護(hù)理要做到定時(shí)側(cè)翻[3],目前國(guó)內(nèi)外的輔助側(cè)翻器械為多功能護(hù)理床,其通過(guò)床面傾斜實(shí)現(xiàn)側(cè)翻功能,但仍在很大程度上依賴人工輔助,且并未考慮人體的運(yùn)動(dòng)機(jī)理,通常會(huì)由于人的轉(zhuǎn)動(dòng)中心和機(jī)構(gòu)轉(zhuǎn)動(dòng)中心不一致,導(dǎo)致運(yùn)動(dòng)過(guò)程中人的背部擠壓或拉拖等,人機(jī)運(yùn)動(dòng)協(xié)同性、功能柔性等方面存在不足[4]。研究人體仰臥位側(cè)翻運(yùn)動(dòng)的軌跡圖形,并擬合構(gòu)造具備人機(jī)運(yùn)動(dòng)協(xié)同性的輔助側(cè)翻機(jī)構(gòu),用于現(xiàn)有翻身床的改進(jìn),以及設(shè)計(jì)穿戴式輔助側(cè)翻機(jī)器人具有重要意義。
圖學(xué)的本質(zhì)是幾何,圖學(xué)研究形和圖的表示、表現(xiàn)以及互相關(guān)系,其基本內(nèi)容包括造型、由形得到圖、圖的處理、由圖得到形以及圖的傳輸?shù)萚5-6],根據(jù)人體運(yùn)動(dòng)軌跡圖形求解運(yùn)動(dòng)幾何關(guān)系,利用運(yùn)動(dòng)軌跡圖形擬合方法進(jìn)行康復(fù)輔具機(jī)構(gòu)設(shè)計(jì)研究,是保證輔具安全性與舒適性的擬人化方法[7-8]。北京體育大學(xué)的研究者提出了基于曲線擬合的上肢伸展姿勢(shì)及其運(yùn)動(dòng)軌跡預(yù)測(cè)的方法,推導(dǎo)出上肢各關(guān)節(jié)及軀干的角位移預(yù)測(cè)方程[9]。日本名古屋大學(xué)的研究者針對(duì)手部運(yùn)動(dòng),設(shè)計(jì)了模擬實(shí)際人手關(guān)節(jié)運(yùn)動(dòng)的新型手外骨骼康復(fù)裝置[10],優(yōu)化了機(jī)器人運(yùn)動(dòng)軌跡,并提出人機(jī)耦合控制策略[11]。華中科技大學(xué)、北京工業(yè)大學(xué)的研究者基于運(yùn)動(dòng)捕捉系統(tǒng)進(jìn)行人體運(yùn)動(dòng)數(shù)據(jù)采集與分析,生成機(jī)器人的擬人運(yùn)動(dòng),開(kāi)展人機(jī)運(yùn)動(dòng)協(xié)同型的康復(fù)機(jī)器人設(shè)計(jì)研究,并進(jìn)行運(yùn)動(dòng)相容性評(píng)估分析[12-14]。運(yùn)動(dòng)捕捉、壓力測(cè)量、肌電測(cè)量等信息采集技術(shù)越來(lái)越多地應(yīng)用于康復(fù)機(jī)器人設(shè)計(jì),韓國(guó)機(jī)器人技術(shù)研究所的研究者在床墊上安裝壓力傳感器陣列,對(duì)病人的臥床姿勢(shì)和動(dòng)作進(jìn)行檢測(cè)和評(píng)估,并在此基礎(chǔ)上開(kāi)發(fā)了一套臥床人體的輔助機(jī)器人系統(tǒng)[15],本文的前期研究利用運(yùn)動(dòng)捕捉和肌電測(cè)量技術(shù)對(duì)人體仰臥位側(cè)翻的運(yùn)動(dòng)學(xué)機(jī)理進(jìn)行了論述,但并未深入探討人體運(yùn)動(dòng)軌跡和機(jī)構(gòu)設(shè)計(jì)的聯(lián)系[16],如何根據(jù)人體運(yùn)動(dòng)信息進(jìn)行機(jī)構(gòu)原理設(shè)計(jì),還需要進(jìn)一步探討。
大多數(shù)運(yùn)動(dòng)捕捉多集中于人體運(yùn)動(dòng)軌跡的理論研究,以人體運(yùn)動(dòng)軌跡為基礎(chǔ)設(shè)計(jì)康復(fù)輔助器械并在設(shè)計(jì)過(guò)程中擬合運(yùn)動(dòng)模型的研究較少,且在仰臥位側(cè)翻身的運(yùn)動(dòng)研究上更少。康復(fù)輔助器械的人機(jī)運(yùn)動(dòng)協(xié)同性是評(píng)判康復(fù)性能的關(guān)鍵,本文建立輔助側(cè)翻部位運(yùn)動(dòng)標(biāo)記模型,于實(shí)驗(yàn)者背部和臀部粘貼特征標(biāo)記點(diǎn),進(jìn)行人體仰臥位側(cè)翻實(shí)驗(yàn),得到肩部和臀部在仰臥位側(cè)翻過(guò)程中的運(yùn)動(dòng)軌跡,分析相鄰標(biāo)記點(diǎn)所連連桿的長(zhǎng)度變化和角度變化,擬合運(yùn)動(dòng)軌跡圖形并建立運(yùn)動(dòng)學(xué)仿真模型,對(duì)比仿真和實(shí)驗(yàn)運(yùn)動(dòng)軌跡的相對(duì)誤差,驗(yàn)證擬合方法的合理性,為康復(fù)機(jī)器人設(shè)計(jì)提供理論基礎(chǔ)。
1 輔助側(cè)翻部位運(yùn)動(dòng)標(biāo)記建模
參考臨床護(hù)理資料,主要仰臥位輔助側(cè)翻動(dòng)作為:姿態(tài)調(diào)整,雙手置于腹部、展平或抬起,雙腿或單腿屈起;輔助側(cè)翻,推動(dòng)患者肩部和膝部完成側(cè)翻,其中膝部帶動(dòng)臀部運(yùn)動(dòng)[17]。結(jié)合前期關(guān)于仰臥位側(cè)翻身動(dòng)作研究[16],以輔助側(cè)翻機(jī)器人最小驅(qū)動(dòng)力和最佳輔助位置為設(shè)計(jì)原則,考慮到輔助側(cè)翻機(jī)構(gòu)實(shí)行的可行性,確定以肩部和臀部作為輔助側(cè)翻機(jī)構(gòu)的施力位置。
為提高輔助機(jī)構(gòu)的人機(jī)運(yùn)動(dòng)協(xié)同性,進(jìn)行人體側(cè)翻過(guò)程中肩部和臀部的運(yùn)動(dòng)軌跡研究,經(jīng)過(guò)前期研究發(fā)現(xiàn),肩部和臀部各粘貼5個(gè)點(diǎn)便可以精確描述運(yùn)動(dòng)模型。
基于人體解剖學(xué)建立肩部和臀部的骨骼運(yùn)動(dòng)模型[18],圖1(a)中,人體肩部主要由左肩胛骨、脊柱和右肩胛骨3個(gè)部分組成,點(diǎn)劃線為肩胛骨自然狀態(tài)下標(biāo)記點(diǎn)的連線,虛線為左/右肩胛骨的外展運(yùn)動(dòng),因人體側(cè)翻過(guò)程中,軀體的重量逐漸作用在肩胛骨上,且由肩胛岡的部分表面承擔(dān)重力作用,導(dǎo)致肩胛骨與胸腔表面發(fā)生相對(duì)滑動(dòng),外展運(yùn)動(dòng)并非是一個(gè)平面的規(guī)則運(yùn)動(dòng),而是多個(gè)平面的不規(guī)則運(yùn)動(dòng),Ml(=1,2,3,4,5)為側(cè)翻前按骨骼位置粘貼的標(biāo)記點(diǎn);M(=1,2,···,5;=1,2,···,)為側(cè)翻過(guò)程中標(biāo)記點(diǎn)的新位置;圖1(b)中,為新位置M相對(duì)原位置M1在冠狀面的轉(zhuǎn)角;為新位置M相對(duì)原位置M1在矢狀面的轉(zhuǎn)角,受側(cè)翻影響,存在5<1,4<2,5<1,4<2關(guān)系;圖1(c)中,人體側(cè)翻過(guò)程中M1和M在水平面上做近似圓弧運(yùn)動(dòng)的圖形軌跡。

圖1 肩部骨骼運(yùn)動(dòng)模型
人體仰臥位側(cè)翻運(yùn)動(dòng)過(guò)程中,左側(cè)翻與右側(cè)翻具有對(duì)稱性,且肩部運(yùn)動(dòng)為3個(gè)平面的復(fù)合運(yùn)動(dòng),由于肩部的外展運(yùn)動(dòng)位移相對(duì)于肩部在空間中的運(yùn)動(dòng)位移來(lái)說(shuō)很小,故忽略外展運(yùn)動(dòng)對(duì)肩部運(yùn)動(dòng)軌跡的影響,只研究右側(cè)翻運(yùn)動(dòng)中肩部在水平面上的軌跡。
臀部骨骼運(yùn)動(dòng)模型如圖2所示。臀部骨骼與肩部骨骼相比略有不同,臀部骨骼中的髖骨與骶骨為一塊整骨,如圖2(a)所示,標(biāo)記點(diǎn)粘貼在髂嵴和骶骨上,運(yùn)動(dòng)過(guò)程中,因骨骼之間未有相對(duì)位移,所以標(biāo)記點(diǎn)相對(duì)于骨骼的位置未發(fā)生變化,而在空間中的位移軌跡與肩部骨骼位移軌跡類似,呈圓弧運(yùn)動(dòng)。M1(=6,7,8,9,10)為側(cè)翻前按骨骼位置粘貼的標(biāo)記點(diǎn);M(=6,7,8,9,10;=1,2,···,)為側(cè)翻過(guò)程中標(biāo)記點(diǎn)的新位置。
以標(biāo)記點(diǎn)的實(shí)際運(yùn)動(dòng)軌跡表征肩部和臀部的骨骼運(yùn)動(dòng)是研究仰臥位側(cè)翻規(guī)律的關(guān)鍵,在此基礎(chǔ)上設(shè)計(jì)具有人機(jī)運(yùn)動(dòng)協(xié)同性的輔助側(cè)翻機(jī)構(gòu)也是實(shí)現(xiàn)人機(jī)共融的關(guān)鍵。選擇合適的標(biāo)記點(diǎn)數(shù)量并粘貼于正確的位置是運(yùn)動(dòng)模型正確建立的關(guān)鍵,布置過(guò)多標(biāo)記點(diǎn)會(huì)導(dǎo)致光學(xué)捕捉鏡頭識(shí)別臨近點(diǎn)為同一點(diǎn)。
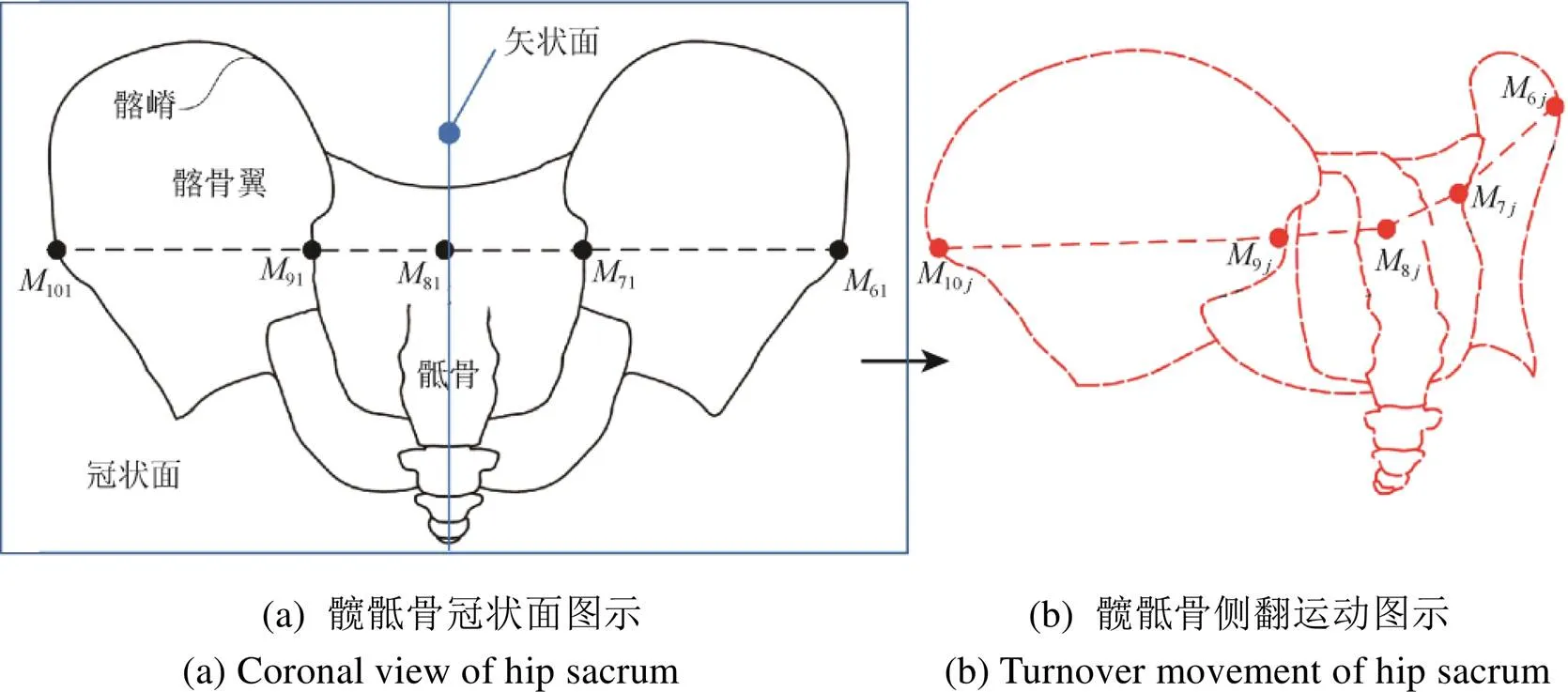
圖2 臀部骨骼運(yùn)動(dòng)模型
2 側(cè)翻運(yùn)動(dòng)捕捉實(shí)驗(yàn)及運(yùn)動(dòng)軌跡圖形分析
使用度量科技公司的NOKOV光學(xué)三維動(dòng)作捕捉系統(tǒng),實(shí)驗(yàn)地點(diǎn)為北京信息科技大學(xué)。實(shí)驗(yàn)者均為男性志愿者,年齡20~24歲,身高170~175 cm,體重55~80 kg,符合實(shí)驗(yàn)要求。搭建側(cè)翻運(yùn)動(dòng)專用測(cè)試實(shí)驗(yàn)臺(tái),如圖3所示,實(shí)驗(yàn)臺(tái)床面由透明亞克力板搭成,在實(shí)驗(yàn)臺(tái)的上方和下方均布置有6個(gè)光學(xué)捕捉鏡頭,在仰臥位側(cè)翻初始姿態(tài)時(shí),下方的光學(xué)鏡頭透過(guò)透明的亞克力板能夠識(shí)別到人體背部的標(biāo)記點(diǎn)。實(shí)驗(yàn)者肩部和臀部根據(jù)上述標(biāo)記點(diǎn)建模情況各粘貼5個(gè)標(biāo)記點(diǎn),在仰臥位側(cè)翻過(guò)程中,上方的光學(xué)鏡頭能夠識(shí)別到側(cè)翻姿態(tài)人體背部的標(biāo)記點(diǎn),實(shí)驗(yàn)者以雙腿屈膝、雙手置于腹部的姿勢(shì)平躺于實(shí)驗(yàn)臺(tái)上。
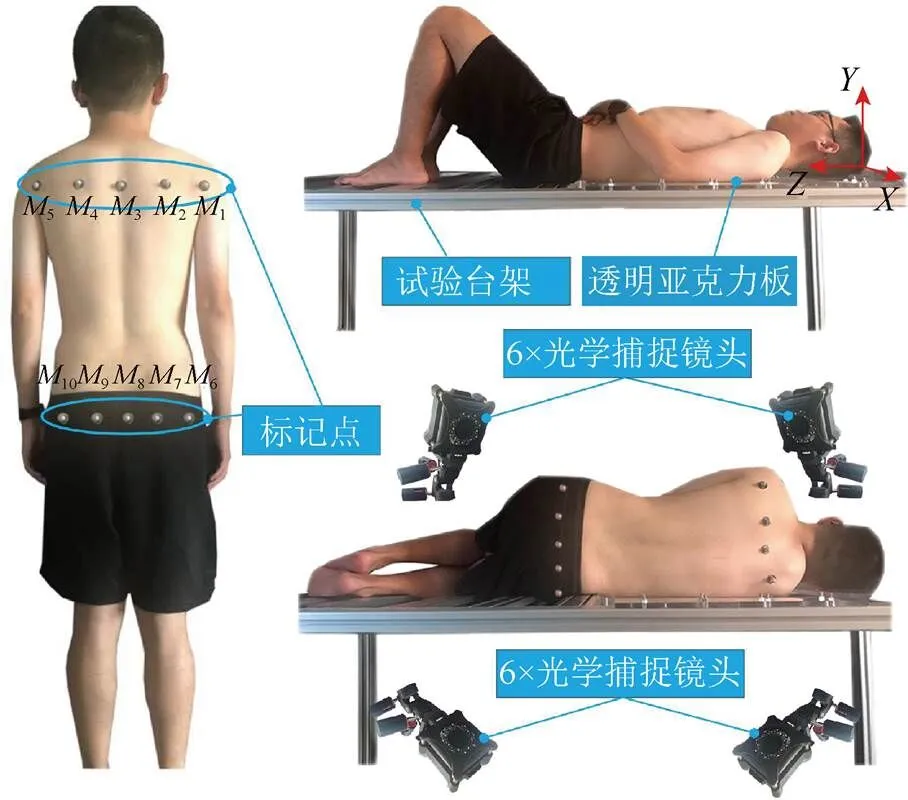
圖3 人體仰臥位側(cè)翻實(shí)驗(yàn)

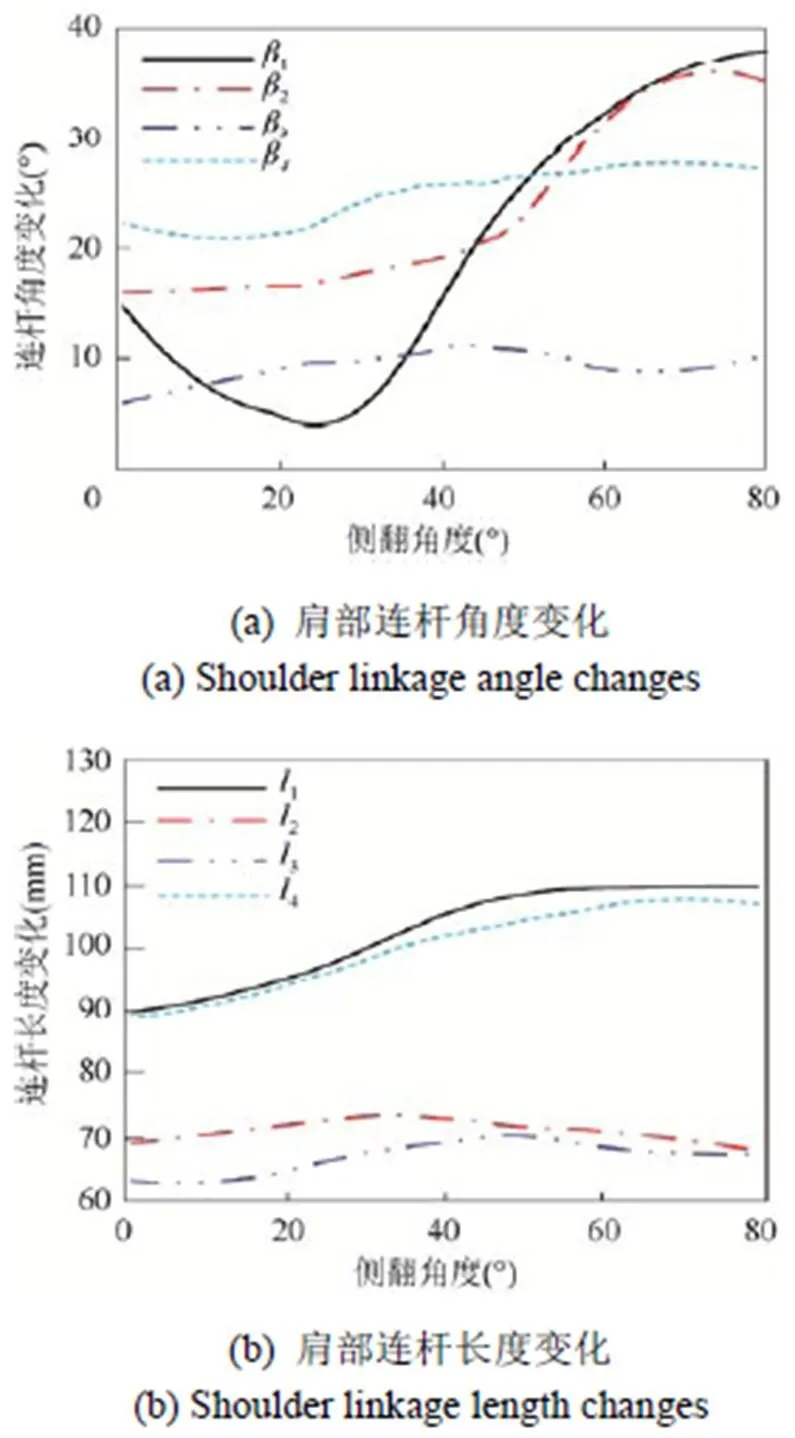
連桿運(yùn)動(dòng)軌跡較為直觀地表現(xiàn)出肩部和臀部的運(yùn)動(dòng)信息,但要將軌跡落實(shí)到機(jī)構(gòu)設(shè)計(jì)中去還需要連桿的特征信息,對(duì)運(yùn)動(dòng)軌跡圖形擬合將有利于指導(dǎo)機(jī)構(gòu)精確運(yùn)動(dòng),通過(guò)運(yùn)動(dòng)捕捉得到的各點(diǎn)的二維坐標(biāo)數(shù)據(jù),利用2個(gè)點(diǎn)的距離公式以及2條直線的夾角公式,在Matlab中編程得到和l(=1,2,···,8),如圖5所示。l(=1,2,···,8)為肩部和臀部各連桿長(zhǎng)度;(=1,2,···,8)為各連桿相對(duì)于前一連桿的夾角,其中1和5為連桿1和連桿5相對(duì)于水平軸的夾角。從圖5(a)可以看出,平均變化1>2>4>3,其中,3的極差約為5°左右,4的極差約為7°左右,意味著左肩胛骨內(nèi)側(cè)緣與脊骨與右肩胛骨內(nèi)側(cè)緣所連直線角度未發(fā)生較大變化,作為對(duì)稱角的2和4差別較大,原因是受壓側(cè)肩胛骨與胸腔的相對(duì)滑動(dòng)現(xiàn)象更明顯;從圖5(b)中可以看出,平均變化1>4>3>2,其中由于人體結(jié)構(gòu)的對(duì)稱性,1與4的變化近似,2與3的變化近似且較小;從圖5(c)可以看出,平均變化5>6>7>8,其中,6,7,8變化近似且較小,約為2°~3°,意味著臀部在側(cè)翻過(guò)程中外形未發(fā)生變化;從圖5(d)中可以看出,平均變化7>8>6>5,連桿長(zhǎng)度未發(fā)生較大變化。

圖4 人體仰臥位側(cè)翻過(guò)程中肩部和臀部運(yùn)動(dòng)軌跡
3 運(yùn)動(dòng)軌跡圖形機(jī)構(gòu)擬合及仿真驗(yàn)證
基于連桿機(jī)構(gòu)設(shè)計(jì)的輔助側(cè)翻康復(fù)機(jī)構(gòu)具有連續(xù)型機(jī)器人的特點(diǎn),該機(jī)構(gòu)以連桿的長(zhǎng)度和角度為輸入?yún)?shù),各連桿獨(dú)立控制又相互耦合,為平衡輔助側(cè)翻機(jī)構(gòu)的柔順性和剛性,減小機(jī)構(gòu)的控制復(fù)雜度,需要改變連桿數(shù)量和輸入?yún)?shù)。經(jīng)運(yùn)動(dòng)軌跡圖形機(jī)構(gòu)擬合后的肩部三連桿和臀部四連桿,忽略了連桿長(zhǎng)度變化,只研究在連桿角度的單參數(shù)輸入情況下,該機(jī)構(gòu)運(yùn)動(dòng)形式與人體運(yùn)動(dòng)軌跡的相容程度。
基于肩胛骨和髖骨骨骼結(jié)構(gòu)建立了人體仰臥位側(cè)翻運(yùn)動(dòng)模型,并進(jìn)行了人體仰臥位側(cè)翻實(shí)驗(yàn),得到以5個(gè)點(diǎn)軌跡為特征的肩部和臀部運(yùn)動(dòng)的一般規(guī)律,從實(shí)驗(yàn)結(jié)果看,肩部連桿2與3的相對(duì)角度變化很小,且2與3連桿的長(zhǎng)度變化很小,可以把該四連桿軌跡圖形擬合為三連桿模型,包括連桿1,2,3和4,同理,臀部連桿5與6,6與7,7與8之間的相對(duì)角度變化很小,且四連桿的長(zhǎng)度變化很小,包括連桿5678,四連桿的相對(duì)角度可以保持在20°左右,將臀部連桿模型拆分為2個(gè)階段,前期的四連桿階段和經(jīng)機(jī)械限位后的單曲桿階段。如圖6所示,連桿驅(qū)動(dòng)方式為繩驅(qū)動(dòng),繩端固定在連桿端部的突起上,通過(guò)驅(qū)動(dòng)繩子給予連桿旋轉(zhuǎn)力矩。
圖6(c)中,肩部1j點(diǎn)的運(yùn)動(dòng)軌跡與其他點(diǎn)相比在平面上的運(yùn)動(dòng)量較小,可以擬合為肩部圍繞著1j點(diǎn)做圓周運(yùn)動(dòng),則,=0;相反,臀部的6j點(diǎn)在平面上的運(yùn)動(dòng)量很大,此時(shí),除了各連桿自身的轉(zhuǎn)動(dòng)外還包括點(diǎn)6j的位移。根據(jù)運(yùn)動(dòng)學(xué)模型計(jì)算各點(diǎn)運(yùn)動(dòng)學(xué)方程,并賦予運(yùn)動(dòng)參數(shù),求解得到各點(diǎn)的運(yùn)動(dòng)學(xué)軌跡。
設(shè)(x,y)為各連桿末端在直角坐標(biāo)系中的坐標(biāo);為相鄰連桿之間的夾角;L為各連桿長(zhǎng)度;=2,3,···,,末端點(diǎn)的軌跡為

將運(yùn)動(dòng)學(xué)方程式(1)兩邊對(duì)時(shí)間求導(dǎo),得到速度表達(dá)式

將式(2)寫(xiě)成矩陣形式,即


由式(4)可以實(shí)現(xiàn)關(guān)節(jié)角速度向末端位置速度的轉(zhuǎn)變,從而得到末端運(yùn)動(dòng)軌跡。

圖6 肩部和臀部連桿運(yùn)動(dòng)學(xué)模型
根據(jù)運(yùn)動(dòng)捕捉得到的數(shù)據(jù),以每幀桿長(zhǎng)的平均值作為桿L的固定長(zhǎng)度,以桿的每幀實(shí)際角速度作為運(yùn)動(dòng)模型的輸入,見(jiàn)表1。

表1 參數(shù)設(shè)置(mm)


圖7 肩部和臀部連桿末端軌跡仿真與實(shí)驗(yàn)對(duì)比
因運(yùn)動(dòng)學(xué)模型的建立具有連續(xù)型機(jī)器人的特點(diǎn),后一連桿的角度和位置都受前一連桿角度和位置的影響,故前一連桿軌跡的誤差會(huì)在后一連桿軌跡中累積放大,從肩部和臀部的仿真曲線中可以看出均存在此現(xiàn)象,計(jì)算每個(gè)仿真坐標(biāo)點(diǎn)與實(shí)驗(yàn)坐標(biāo)點(diǎn)的距離作為仿真曲線與實(shí)驗(yàn)曲線相似度的判定依據(jù),如圖8所示。可以看出,肩部3個(gè)連桿軌跡末端在初始階段誤差較大,但相對(duì)整體長(zhǎng)度并不明顯,且后期可通過(guò)桿長(zhǎng)的變化予以修正,誤差在側(cè)翻角度5°后大幅度減小,在30°后維持在5 mm左右波動(dòng),且誤差均值2<4<5;臀部的誤差曲線圖中,7,8,9和10的變化均小于肩部,側(cè)翻角度30°后誤差曲線變化平穩(wěn),并在2 mm左右波動(dòng)。
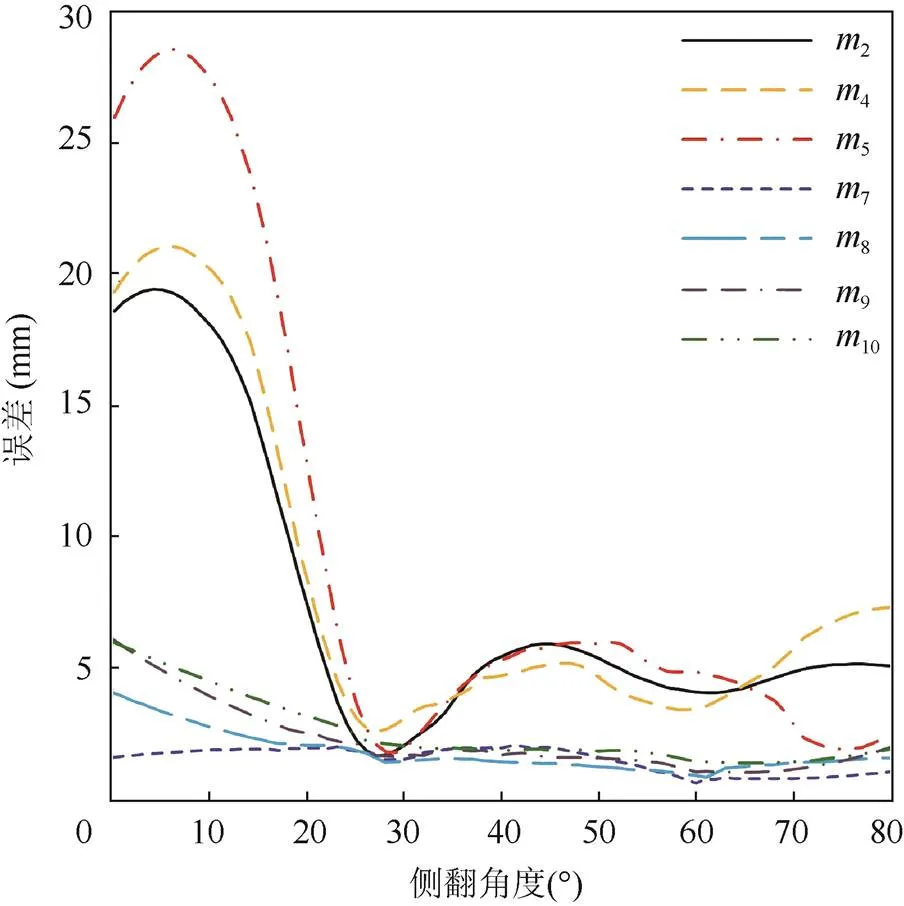
圖8 仿真曲線與實(shí)驗(yàn)曲線的誤差對(duì)比
4 結(jié) 論
本文進(jìn)行了人體仰臥位側(cè)翻動(dòng)作捕捉實(shí)驗(yàn)和運(yùn)動(dòng)學(xué)仿真,實(shí)驗(yàn)和仿真結(jié)果對(duì)比證明了運(yùn)動(dòng)學(xué)模型建立的正確性和軌跡圖形擬合的合理性,在考慮人體正常生理運(yùn)動(dòng)的前提下,實(shí)驗(yàn)所得運(yùn)動(dòng)軌跡較完整地表現(xiàn)出肩部和臀部的運(yùn)動(dòng)規(guī)律,將運(yùn)動(dòng)軌跡轉(zhuǎn)化為易于機(jī)構(gòu)設(shè)計(jì)的連桿運(yùn)動(dòng),在運(yùn)動(dòng)效果不變的基礎(chǔ)上減少多連桿的數(shù)量,減少了機(jī)構(gòu)的自由度,增加了機(jī)構(gòu)的剛性,提出的輔助側(cè)翻機(jī)構(gòu)構(gòu)型較完整地體現(xiàn)了運(yùn)動(dòng)學(xué)模型的構(gòu)造原理和運(yùn)動(dòng)特性,多個(gè)關(guān)節(jié)串聯(lián)可以實(shí)現(xiàn)機(jī)構(gòu)構(gòu)型多個(gè)自由度旋轉(zhuǎn),為具有人-機(jī)運(yùn)動(dòng)協(xié)同特征的康復(fù)機(jī)構(gòu)研究提供了一種可行的方案。
[1] YUSUF S, OKUWA M, SHIGETA Y, et al. Microclimate and development of pressure ulcers and superficial skin changes[J]. International Wound Journal, 2015, 12(1): 40-46.
[2] National Pressure Ulcer Advisory Panel, European Pressure Ulcer Advisory Panel, Pan Pacific Pressure Injury Alliance. Prevention and treatment of pressure ulcers: clinical practice guideline[M]. 2nd ed. Australia: Cambridge Media, 2014: 10-14.
[3] DEALEY C, POSNETT J, WALKER A. The cost of pressure ulcers in the United Kingdom[J]. Journal of Wound Care, 2012, 21(6): 261-266.
[4] 廖翼. 智能護(hù)理床的發(fā)展現(xiàn)狀與趨勢(shì)[J]. 醫(yī)療裝備, 2013, 26(10): 5-7. LIAO Y. Development status and trend of intelligent nursing bed[J]. Chinese Journal of Medical Device, 2013, 26(10): 5-7 (in Chinese).
[5] 彭正洪, 于海燕, 焦洪贊, 等. 圖形演化下的圖學(xué)學(xué)科[J]. 圖學(xué)學(xué)報(bào), 2018, 39(5): 984-989. PENF Z H, YU H Y, JIAO H Z, et al. Graphics discipline based on the graphical evolution[J]. Journal of Graphics, 2018, 39(5): 984-989 (in Chinese).
[6] 何援軍. 圖學(xué)與幾何[J]. 圖學(xué)學(xué)報(bào), 2016, 37(6): 741-753. HE Y J. Graphics and geometry[J]. Journal of Graphics, 2016, 37(6): 741-753 (in Chinese).
[7] HE L, XIONG C H, LIU K, et al. Mechatronic design of a synergetic upper limb exoskeletal robot and wrench-based assistive control[J]. Journal of Bionic Engineering, 2018(2): 247-259.
[8] BOCKEMUEHL T, TROJE N F, DUERR V. Inter-joint coupling and joint angle synergies of human catching movements[J]. Human Movement Science, 2010, 29(1): 73-93.
[9] 郭璐, 沈模衛(wèi). 基于曲線擬合的上肢伸展姿勢(shì)及其運(yùn)動(dòng)軌跡預(yù)測(cè)[J]. 人類工效學(xué), 2013, 19(3): 75-81, 85. GUO L, SHEN M W. Prediction of upper limb extension posture and its motion trajectory based on curve fitting[J]. Chinese Journal of Ergonomics, 2013, 19(3): 75-81, 85 (in Chinese).
[10] ARATA J, OHMOTO K, GAEESRT R, et al. A new hand exoskeleton device for rehabilitation using a three-layered sliding spring mechanism[C]//2013 IEEE International Conference on Robotics and Automation. New York: IEEE Press, 2013: 3902-3907.
[11] IQBAL J, KHAN H, TSAGARAKIS N G, et al. A novel exoskeleton robotic system for hand rehabilitation: conceptualization to prototyping[J]. Biocybernetics and Biomedical Engineering, 2014, 34(2): 79-89.
[12] CHEN W B, XIONG C H, SUN R L, et al. A 10-degree of freedom exoskeleton rehabilitation robot with ergonomic shoulder actuation mechanism[J]. International Journal of Humanoid Robotics, 2011, 8(1): 47-71.
[13] LIU K, XIONG C H, HE L, et al. Postural synergy based design of exoskeleton robot replicating human arm reaching movements[J]. Robotics & Autonomous Systems, 2018, 99: 84-96.
[14] ZHANG L Y, LI J F, SU P, et al. Improvement of human-machine compatibility of upper-limb rehabilitation exoskeleton using passive joints[J]. Robotics & Autonomous Systems, 2019, 112: 22-31.
[15] SEO K H, CHOI T Y, OH C. Development of a robotic system for the bed-ridden[J]. Mechatronics, 2011, 21(1): 227-238.
[16] 盧達(dá), 蘇鵬, 季潤(rùn), 等. 人體仰臥位側(cè)翻的動(dòng)力學(xué)仿真及實(shí)驗(yàn)驗(yàn)[J]. 生物醫(yī)學(xué)工程學(xué)雜志, 2019, 36(5): 777-784. LU D, SU P, JI R, et al. Dynamic simulation and experimental verification of human body turning over in supine position[J]. Journal of Biomedical Engineering, 2019, 36(5): 777-784 (in Chinese).
[17] 蔣鵬. 翻身訓(xùn)練-偏癱患者康復(fù)的起跑線[J]. 中國(guó)社區(qū)醫(yī)師, 2012(30): 27. JIANG P. Rollover training-the starting line for hemiplegic rehabilitation[J]. Chinese Community Doctors, 2012(30): 27 (in Chinese).
[18] 鄒錦慧, 劉樹(shù)元. 人體解剖學(xué)[M]. 3版. 北京: 科學(xué)出版社, 2009: 3-9. ZOU J H, LIU S Y. Human anatomy[M]. 3rd ed. Beijing: Science Press, 2009: 3-9 (in Chinese).
Design of aided mechanism configuration for human body turning-over based on motion trajectory fitting
SU Peng1,2, LU Da1, LUN Qing-long1, LI Jian2, XU Xiao-zhong1, FAN Yu-bo2,3
(1. School of Electromechanical Engineering, Beijing Information Science and Technology University, Beijing 100192, China; 2. Key Laboratory of Rehabilitation Aids Technology and System of the Ministry of Civil Affairs, National Research Center for Rehabilitation Technical Aids, Beijing 100176, China; 3. Beijing Advanced Innovation Center for Biomedical Engineering, Beihang University, Beijing 100191, China)
Turning over from supine position is one of effective measures to prevent pressure ulcers for long-term bedridden patients, and it is significant to explore mechanisms of human movement and to personate the design of aided human turnover mechanism. The human shoulders and buttocks are the key force application positions for the aided human turnover. Based on the human anatomy, the spatial motion of the shoulder and buttock bones were analyzed, and the motion marker model was established. In addition, the motion capture experiment of the human supine turnover position was undertaken to obtain figures of the motion trajectory and the feature information of the linkage model of shoulders and buttocks. Through the analysis on the changing progress of the length and angle of the linkage mechanism, the graph geometric analysis and simplification of the linkage mechanism were carried out. Based on the motion trajectory graph fitting, the configuration design of the aided mechanism was completed, with the kinematics simulation implemented. The slight error of simulation and experiment graph fitting proves the rationality of the proposed anthropomorphic aided mechanism method. The results can provide a theoretical basis for the design of the man-machine collaborative rehabilitation mechanism.
turnover; motion capture; motion trajectory; graph fitting; mechanism configuration
TH 112.1
10.11996/JG.j.2095-302X.2020060993
A
2095-302X(2020)06-0993-08
2020-04-02;
2020-06-22
2 April,2020;
22 June,2020
中國(guó)博士后科學(xué)基金面上項(xiàng)目(2018M641290);北京市自然科學(xué)基金-海淀原始創(chuàng)新聯(lián)合基金項(xiàng)目(19L2018);北京市屬高校“青年拔尖人才”培育計(jì)劃項(xiàng)目(CIT&TCD201704063);北京市教委科研計(jì)劃項(xiàng)目(KM202011232009)
Chinese Postdoctoral Science Foundation (2018M641290); Beijing Natural Science Foundation -Haidian Original Innovation Joint Fund Project (19L2018); Training Plan of Young Top-notch Talent of Beijing Universities (CIT&TCD201704063); Beijing Municipal Education Commission Research Project (KM202011232009)
蘇 鵬(1985-),男,山東膠南人,副教授,博士,碩士生導(dǎo)師。主要研究方向?yàn)榭祻?fù)輔具技術(shù)、醫(yī)療機(jī)器人技術(shù)。E-mail:supeng@bistu.edu.cn
SU Peng (1985-), male, associate professor, Ph.D. His main research interests cover rehabilitation assistive technology and medical robotics. E-mail:supeng@bistu.edu.cn
樊瑜波(1965-),男,重慶人,教授,博士,博士生導(dǎo)師。主要研究方向?yàn)樯锪W(xué)、康復(fù)工程。E-mail:yubofan@buaa.edu.cn
FAN Yu-bo (1965-), male, professor, Ph.D. His main research interests cover biomechanics and rehabilitation engineering. E-mail:yubofan@buaa.edu.cn