月面著陸器INS/CNS深組合導航方法
2021-01-12 13:55:52孫洪馳穆榮軍李云天崔乃剛
宇航學報 2020年12期
關鍵詞:模型
孫洪馳,穆榮軍,李云天,崔乃剛
(哈爾濱工業大學航天工程系,哈爾濱 150001)
0 引 言
在月面著陸器下降過程中,需要快速調整姿態,要求導航系統具備高實時性、高精度和高可靠性[1-2]。當前深空探測任務中姿態精度最高的導航方式為天文導航,其姿態精度可達角秒級[3-5]。為提高導航系統的可靠性,月面著陸器通常都攜帶慣導與星敏感器,采用慣性/天文組合導航方式進行導航解算[6-7]。慣性/天文組合導航系統一般可分為松組合和緊組合兩種模式。松組合模式下慣導和星敏感器各自獨立地進行導航解算,然后將導航誤差作為觀測量進行組合[8];緊組合模式下星敏感器不再進行獨立解算,而是作為測量星點矢量的傳感器使用,根據星點矢量誤差構建量測方程[9]。無論是松組合模式還是緊組合模式,星敏感器均需要采用星圖識別算法進行導航星的識別,這一過程往往是天文導航所有流程中耗時最多的環節[10-11]。
針對上述問題本文提出一種慣性/天文深組合模型,能在不進行星圖識別的前提下實現導航解算,有助于提高天文導航算法的計算效率,降低系統的功耗,減少對硬件資源的占用。同時在導航星數目不足3顆時仍可正常工作,可有效提高導航系統的實時性與可靠性。
1 月面著陸器運動學模型
月面著陸器運動學模型包括姿態微分方程、速度微分方程和位置微分方程。月面著陸器姿態采用四元數進行描述,姿態微分方程可以表示為
(1)
(2)

對于月面著陸器,在固連系下的速度ve為
(3)
將速度ve轉到導航系中,得
(4)
進一步整理,可得
(5)
(6)
式中:fb為體系下的比力;gn為導航系下的月球重力加速度。
記p=[L,λ,h]T,月面著陸器位置微分方程為
(7)
綜上所述,式(1)、式(6)和式(7)共同組成了月面著陸器運動學模型。
2 星敏感器測量模型與慣性/天文松、緊組合模型
2.1 星敏感器測量模型
在星敏感器中,圖像是以像素的形式進行采集和存儲的,為了能建立起星點矢量與像素坐標之間的關系,引入視覺導航領域常用的內參數矩陣構建星敏感器的測量模型。假設某導航星sk在星敏感器坐標系下的方向矢量為lsk=[X,Y,Z]T,則其在像平面中的坐標為
(8)
式中:f為星敏感器焦距。將星點坐標轉換到像素坐標系下,得
(9)
式中:α和β描述了像平面坐標和像素坐標的縮放關系,物理含義是單位長度內的像素數目;cx和cy描述了像平面坐標和像素坐標的平移關系,單位為像素數;fx=αf,fy=βf,作用是簡化模型。將式(9)寫成矩陣形式,得
(10)
式中:A即為星敏感器的內參數矩陣,且各項參數出廠后是固定不變的。l′sk為lsk的歸一化矢量。
2.2 慣性/天文松組合模型
慣性/天文松組合是最常見的組合方式,該模式下慣導與星敏感器各自獨立工作,利用二者輸出的姿態之差構建觀測量。狀態方程選取捷聯慣導系統的誤差傳播方程,具體推導過程參照文獻[12]。
姿態誤差傳播方程為
(11)
速度誤差傳播方程為
(12)
位置誤差傳播方程為
(13)
(14)
(15)


(16)
記δq=[δq0, (δqv)T]T,δq0和δqv代表δq的標量部分和矢量部分。當φ為小量時,令φ=|φ|,有
(17)
由式(17)可以得到觀測量為φ=2δqv。
選取姿態失準角、速度誤差、位置誤差、三軸陀螺儀零偏和加速度計零偏作為狀態變量,松組合模式下狀態量、狀態方程和量測方程為
(18)
(19)
式中:W為陀螺角速度測量白噪聲和加速度計比力測量白噪聲;V為星敏感器測量白噪聲;F陣各元素取值參照式(11)致式(15),G陣和H陣各元素取值如下
(20)
2.3 慣性/天文緊組合模型
慣性/天文緊組合模型以星點矢量誤差為觀測量,該模式下星敏感器不進行姿態解算。緊組合狀態方程仍為慣導系統的誤差傳播方程,僅觀測方程有所不同。在緊組合模型中,星敏感器測量到的星點矢量ls可以表示為
(21)
式中:ln為該星點矢量在導航系下的投影,φ為導航系的姿態失準角。
(22)

(23)
當視場中存在N顆導航星時,觀測方程可以表示為
(24)
觀測矩陣H陣各元素取值如下
(25)
3 慣性/天文深組合模型
慣性/天文深組合模型根據慣導輸出的姿態,預測此姿態下理論上星敏感器應觀測到的星圖(記為預測星圖),然后利用預測星圖和實測星圖的灰度誤差進行失準角的估計,從而在像素層面構建新的觀測模型而非對單個星點進行處理,故深組合時不需要星圖識別。
3.1 基于李群李代數理論的灰度誤差函數
群是一種集合加一種運算組成的代數結構,李群指具有連續性質的群。構建灰度誤差函數需涉及到其中一個特殊的李群—特殊正交群SO(3),是由姿態陣C構成的,其數學定義為
SO(3)={C∈R3×3|CCT=I,det(C)=1}
(26)
對于每一個C,都有對應的李代數,SO(3)的李代數so(3)定義為
so(3)={(φc×)∈R3×3|φc∈R3}
(27)
so(3)反映了SO(3)的導數性質,對姿態陣C求微分,有
(28)
式中:φc的物理意義是姿態陣C對應的等效旋轉矢量,式(28)為關于C的微分方程,求解后得到
C=exp(φc×)
(29)

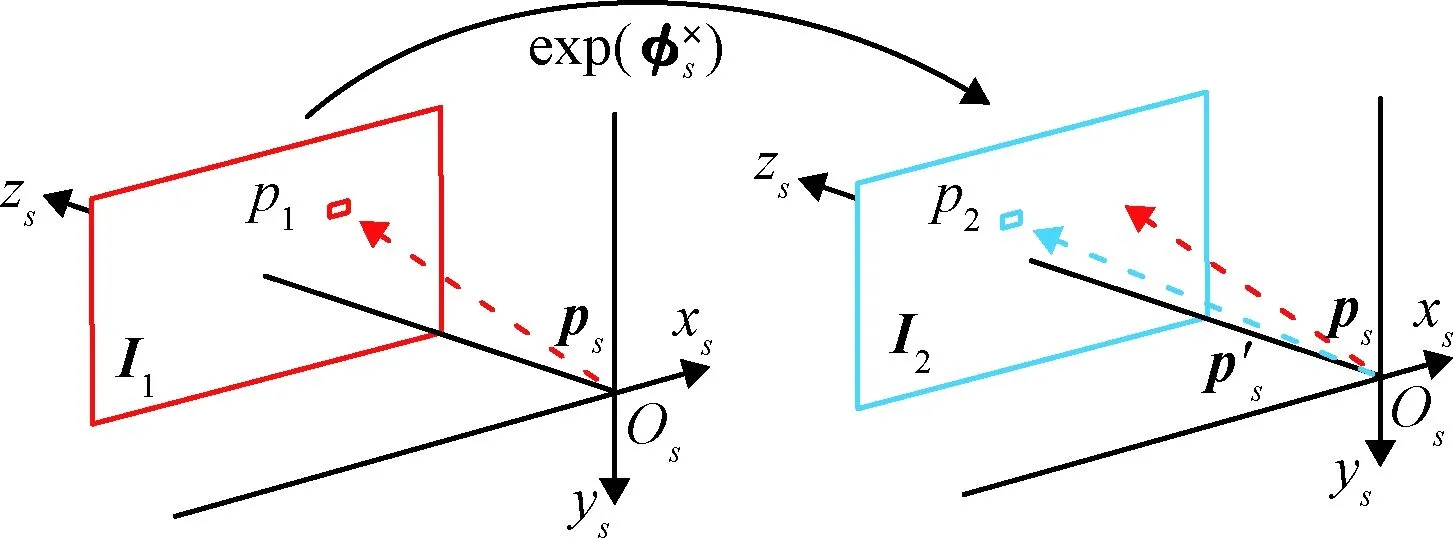
圖1 灰度誤差函數構建過程
如圖1所示,I1為星敏感器拍攝星圖,I2為慣導預測星圖,設p1為I1中第i個像素點,滿足
p1=Aps
(30)
(31)

(32)
(33)

ps和p′s可視為同一矢量的真值及慣導預測值,pn為該矢量在導航系下的投影,滿足
(34)
由式(34)即可得到φ與φs的關系式為
(35)
3.2 基于阻尼牛頓法的姿態優化算法

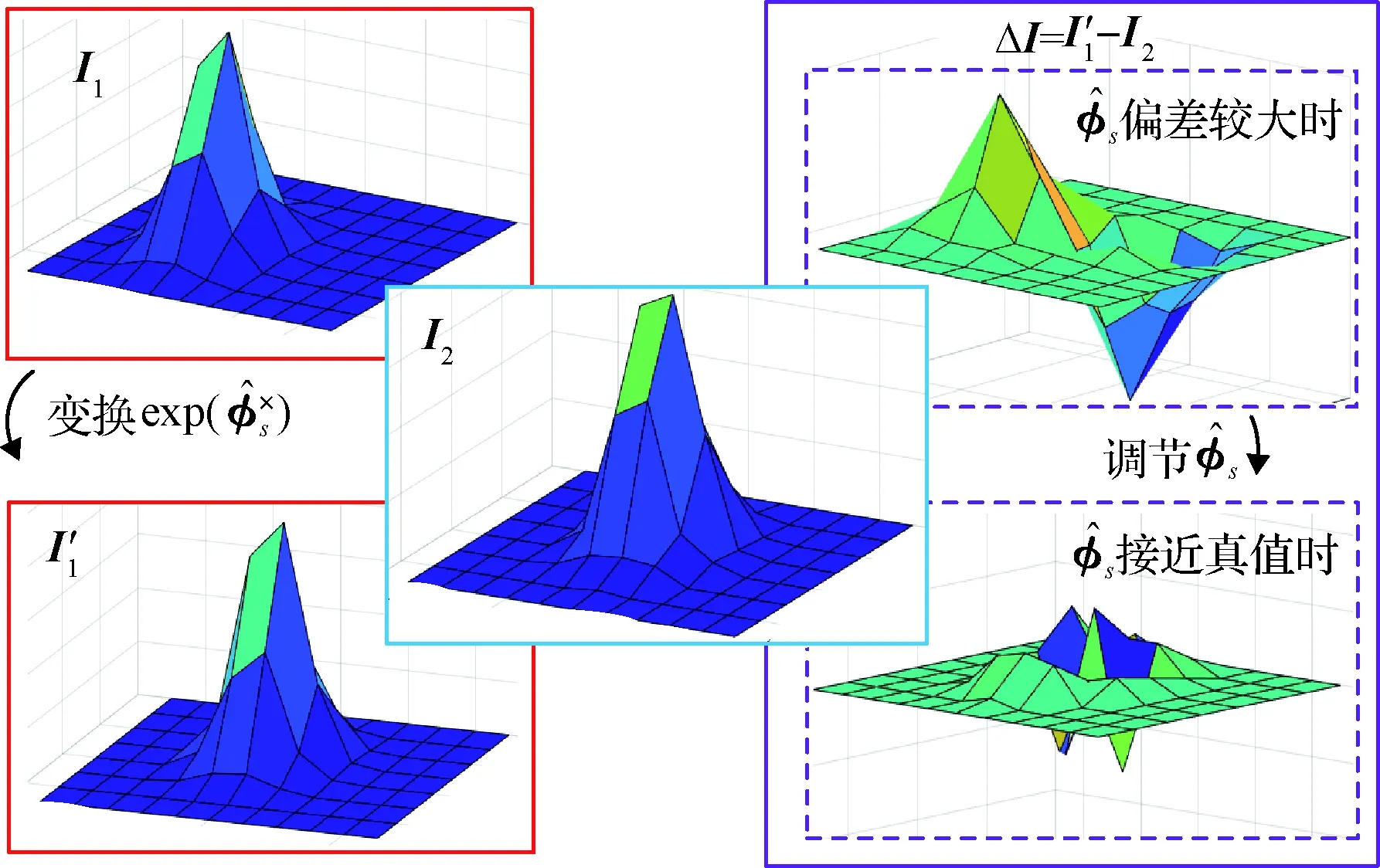
圖2 深組合模型基本原理
根據灰度不變假設,式(32)可進一步寫為
(36)
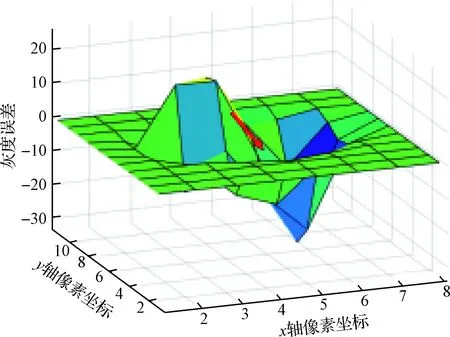
圖3 某星點窗口內灰度誤差優化方向
(37)
(38)
接下來分別計算這3項偏導數,?I2/??為I2在?處的像素梯度,記?像素坐標為?=[ua,ub]T,則像素梯度為
(39)
記ρ=[Xρ,Yρ,Zρ]T,利用式(10),可以求得??/?ρ的具體形式為
(40)
(41)
根據BCH公式,有
(42)

(43)

3.3 慣性/天文深組合濾波模型
為提高算法的計算效率,可針對月面環境特征對狀態方程做進一步簡化。例如,月球自轉速度很小,且月面著陸器下降過程時間較短,所引起的導航系旋轉也很微弱,月面重力較弱,其誤差項δgn對速度誤差的影響也是小量。忽略狀態方程式(11)-式(15)中的小量后,可得簡化后的狀態方程為
(44)
量測方程與式(19)一致。狀態與量測方程都是線性模型,離散化后可采用標準卡爾曼濾波進行狀態估計。
4 仿真校驗
4.1 算法魯棒性驗證
利用慣導姿態預測星敏光軸指向,估算的星點和實際觀測星點不一定完全匹配,慣導預測星圖會出現缺星和多星的現象。但根據式(33)可知,本文所提出的深組合算法,其優化對象為所有導航星堆疊而成的全局灰度誤差,優化結果為最小二乘意義下的最優解,故理論上個別星點的不匹配不會對最終結果造成太大影響,接下來通過仿真進行驗證。
采用SAO星表數據進行仿真驗證,歲差、章動采用IAU1980模型進行補償,光行差只考慮一階修正項,極移修正量由國際地球自轉服務(International earth rotation service,IERS)提供。星圖不確定度按低(不確定度:17%)、中(不確定度:50%)、高(不確定度:70%)三種情況進行仿真驗證。
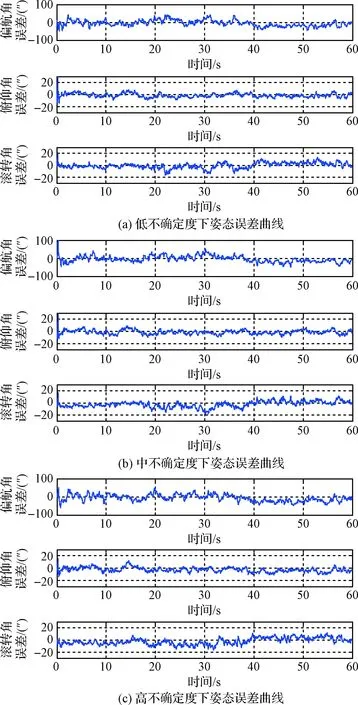
圖4 低、中、高三種不確定度下姿態誤差曲線
從圖4(c)中可以看出,即使在高不確定度下,慣導僅正確預測30%的導航星,深組合算法依然收斂,三種工況僅精度略有不同。這說明深組合算法具有較強的魯棒性,慣導僅需要正確預測到其中的幾顆亮星即可進行導航解算。

(45)
式(45)表明,對全部導航星做優化等價于只優化正確匹配的星點,不匹配的星點由于灰度誤差為常值,不影響優化結果。
4.2 三種組合方式對比仿真
本文所提出的方法主要針對月面著陸器姿態調整段進行設計,仿真軌跡設置為姿態調整段一條持續時間60 s的軌跡。著陸過程中著陸器姿態變化及星敏感器視場內的星圖變化如圖5所示。
采用阻尼牛頓法一般迭代3~4次即可使姿態達到收斂。取第1、4次迭代優化結果,對比其圖像灰度誤差,對比結果如圖6所示。
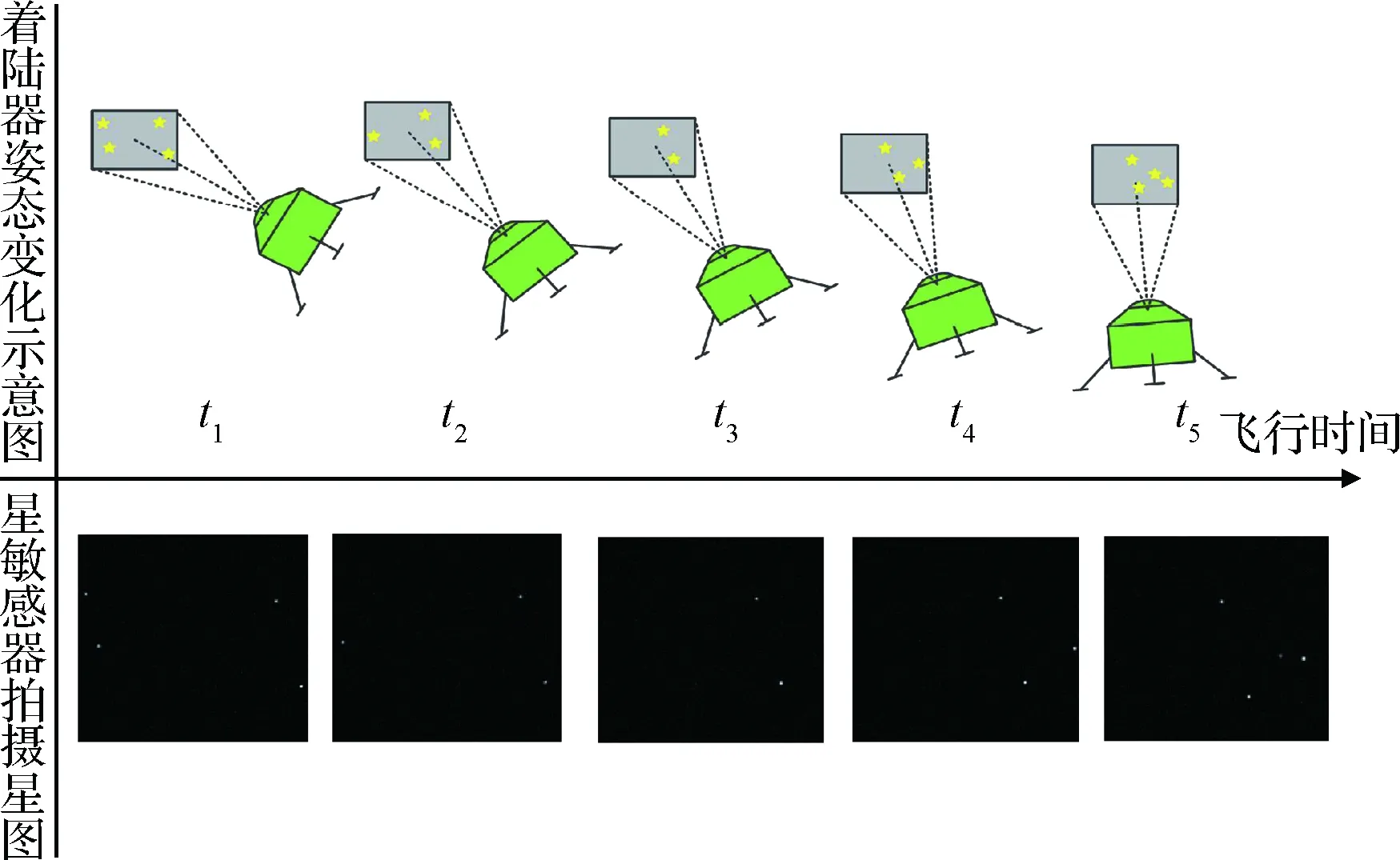
圖5 仿真工況設計
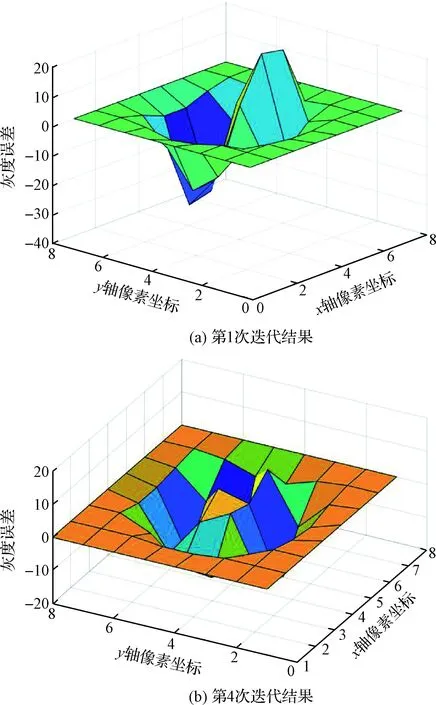
圖6 某星點窗口內圖像灰度誤差迭代結果
接下來對比慣性/天文松、緊、深三種組合模式下的組合導航精度和算法計算耗時。緊組合模式只進行星圖識別不進行QUST解算,故算法耗時應少于松組合。深組合模式則是采用圖像梯度優化算法獲得姿態,一般迭代4次算法已經收斂,平均每顆星占據3×3即9個像素點,故平均每顆星需要優化算法迭代計算36次;而緊組合的星圖識別算法,采用星表分割后(極限星等+6Mv)平均每個子星表依舊含有196顆導航星,角距搜索空間大小為196×196/2=19208,即平均每顆星需要進行的搜索次數為19208次,顯然這一過程的計算量要大于深組合的優化算法。三種組合方式的解算精度和算法耗時統計仿真結果如圖7和圖8所示。
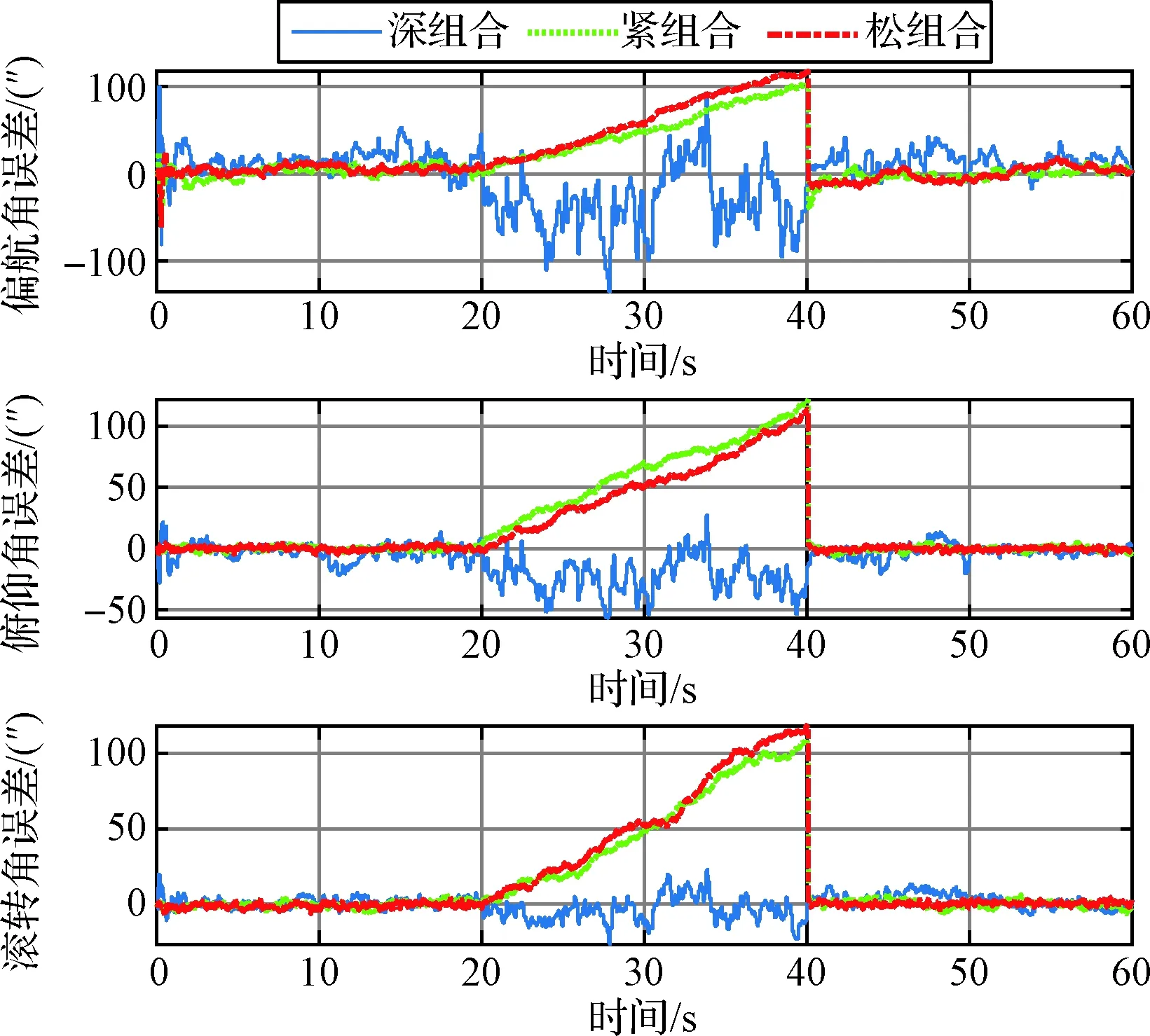
圖7 松、緊、深組合導航模式精度對比
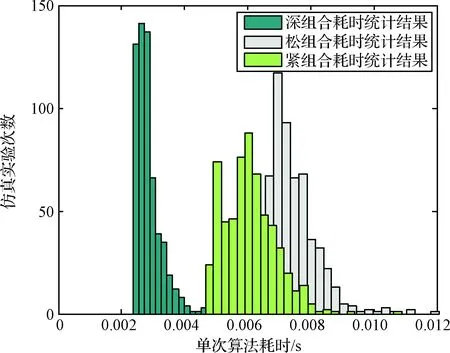
圖8 松、緊、深組合導航模式計算耗時對比
分析圖中不同階段的三種導航模式精度曲線和計算耗時統計直方圖,可以得到以下分析結果:
1) 0~20 s內導航星充足(≥3顆),松、緊、深三種組合導航模式的姿態精度基本處于同一量級;
2) 20~40 s內視場中可見導航星降為2顆,星圖識別算法失效,松、緊組合模式導航結果開始發散,深組合模式依舊可以進行導航解算;
3) 40~60 s時視場內可見導航星數目恢復到≥3顆,此時松、緊組合導航模式迅速收斂,三種導航模式的姿態精度基本處于同一量級;
4) 俯仰、滾轉軸姿態精度整體上優于偏航軸,這是因為偏航軸與星敏感器光軸重合,星敏感器光軸方向的姿態精度較其余兩軸差一個量級;
5) 經統計,松、緊、深三種組合模式的單次計算耗時均值分別為0.0074 s、0.0061 s、0.0029 s。深組合模式計算耗時最低。
5 結 論
本文針對月面著陸器設計了一種慣性/天文深組合導航方法。仿真結果表明,在導航星數目充足的情況下,松、緊、深三種導航方式姿態精度處于同一量級;在導航星數目不足時,松、緊組合方式無法實現導航星的識別,算法開始發散,而深組合模式依然可以正常工作;在計算耗時方面,深組合模式相較于緊組合時間縮減50%、相較于松組合時間縮減60%。深組合模式計算耗時短,有利于提高月面著陸器導航實時性,降低對硬件資源的占用,同時可保證在星敏感器視場內星點數目不足時,導航結果不發散。將其應用于月面著陸器等實時性需求較高的背景中,可以有效提升導航系統的快速響應能力并節約系統功耗,為未來月面著陸器導航系統設計提供理論參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19