基于LabVIEW的電液伺服加載試驗(yàn)臺(tái)測(cè)控系統(tǒng)設(shè)計(jì)
2021-01-12 01:58:02辛慧娟劉凱強(qiáng)寧朝陽(yáng)
工業(yè)加熱 2020年12期
侯 偉,辛慧娟,張 慧,劉凱強(qiáng),寧朝陽(yáng)
(陜西工業(yè)職業(yè)技術(shù)學(xué)院,陜西 咸陽(yáng) 712000)
電液伺服加載系統(tǒng)[1-2]是一種常用的載荷加載設(shè)備,它可以實(shí)現(xiàn)動(dòng)靜態(tài)力或扭矩等的加載,具有控制精度高、響應(yīng)速度快、輸出功率大等特點(diǎn),被廣泛應(yīng)用于土木工程結(jié)構(gòu)測(cè)試、材料測(cè)試、汽車零部件試驗(yàn)、飛機(jī)結(jié)構(gòu)試驗(yàn)等測(cè)試試驗(yàn)中。電液伺服加載測(cè)控系統(tǒng)作為電液伺服系統(tǒng)的控制核心,其主要作用是控制液壓系統(tǒng)精準(zhǔn)施加載荷[3]。
本文針對(duì)轉(zhuǎn)軸類零件的扭矩加載電液伺服系統(tǒng),以LabVIEW為軟件開(kāi)發(fā)平臺(tái)[4-5],結(jié)合NI的數(shù)據(jù)采集系統(tǒng)和各種傳感器,設(shè)計(jì)了一套電液伺服加載試驗(yàn)臺(tái)測(cè)控系統(tǒng),實(shí)現(xiàn)試驗(yàn)扭矩自動(dòng)加載、試驗(yàn)臺(tái)參數(shù)實(shí)時(shí)監(jiān)測(cè)、試驗(yàn)數(shù)據(jù)顯示和記錄保存。該系統(tǒng)具有開(kāi)發(fā)周期短、操作簡(jiǎn)單、穩(wěn)定性高、擴(kuò)展型好、可維護(hù)性好等特點(diǎn)。
1 扭矩加載試驗(yàn)臺(tái)整體結(jié)構(gòu)
轉(zhuǎn)軸類零件或裝置在使用前通常需要進(jìn)行扭矩加載試驗(yàn),檢驗(yàn)轉(zhuǎn)軸的性能,以確保其使用的安全性,通常采用扭矩加載設(shè)備進(jìn)行試驗(yàn)。扭矩加載電液伺服試驗(yàn)臺(tái)主要由液壓部分、機(jī)械部分和控制部分組成,如圖1所示[6]。液壓部分的主要功能是為機(jī)械部分提供油源動(dòng)力。機(jī)械部分以液壓馬達(dá)為執(zhí)行機(jī)構(gòu),液壓馬達(dá)電液伺服閥的控制下,在對(duì)安裝與其中的被測(cè)試零件施加扭矩載荷。控制部分由計(jì)算機(jī)控制數(shù)據(jù)采集卡輸出模擬信號(hào),以調(diào)節(jié)電液伺服閥開(kāi)口大小,控制液壓馬達(dá)輸出力矩,與此同時(shí)采集扭矩傳感器反饋信號(hào),從而實(shí)現(xiàn)不同扭矩輸出;另外,采集光電編碼器信號(hào)用于測(cè)量扭矩加載時(shí)轉(zhuǎn)軸類零件的扭轉(zhuǎn)形變情況[7-8]。
2 基于LabVIEW的測(cè)控系統(tǒng)硬件設(shè)計(jì)
2.1 測(cè)控系統(tǒng)硬件總體方案
試驗(yàn)臺(tái)測(cè)控系統(tǒng)的硬件部分主要由工業(yè)計(jì)算機(jī)、數(shù)據(jù)采集卡、扭矩傳感器、光電編碼器等組成,如圖2所示。光電編碼器的作用是測(cè)量轉(zhuǎn)軸兩端的旋轉(zhuǎn)角位移,計(jì)算轉(zhuǎn)軸零件在承受載荷時(shí)的形變量;扭矩傳感器的作用是測(cè)量轉(zhuǎn)軸兩端的扭轉(zhuǎn)力矩,它既是扭矩加載試驗(yàn)的試驗(yàn)數(shù)據(jù),也是測(cè)控系統(tǒng)控制施加扭矩時(shí)的反饋信號(hào);數(shù)據(jù)采集卡采集光電編碼器和扭矩傳感器的信號(hào)傳輸給計(jì)算機(jī)進(jìn)行顯示與存儲(chǔ),計(jì)算機(jī)通過(guò)數(shù)據(jù)采集卡輸出信號(hào),控制電液伺服閥開(kāi)口,進(jìn)而控制液壓馬達(dá)輸出力矩[9]。
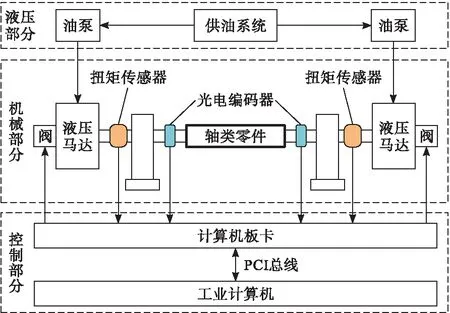
圖1 扭矩加載試驗(yàn)臺(tái)

圖2 測(cè)控系統(tǒng)硬件設(shè)計(jì)框圖
2.2 工業(yè)計(jì)算機(jī)
本文采用友通公司的EC531型工業(yè)計(jì)算機(jī),如圖3所示。該計(jì)算機(jī)采用了第4代Intel Core處理器,支持內(nèi)存大小16G,具有3個(gè)PCI接口,運(yùn)作溫度為0~45 ℃,滿足系統(tǒng)使用和硬件擴(kuò)展需求。

圖3 EC531型工業(yè)計(jì)算機(jī)
2.3 數(shù)據(jù)采集卡
本文采用美國(guó)NI公司的PCI6221型多功能數(shù)據(jù)采集卡,如圖4所示。該板卡通過(guò)PCI總線與計(jì)算機(jī)相連,既能輸入輸出模擬信號(hào),又能輸入輸出數(shù)字信號(hào),具有16通道16位模擬輸入(AI),最大采樣率250 kS/s,輸入電壓范圍為±10 V,可采集扭矩傳感器信號(hào),具有2通道16位模擬輸出(AO),最大采樣率833 kS/s,輸出電壓范圍為±10 V,可控制伺服閥,具有2個(gè)16位計(jì)數(shù)器(Counter),可采集轉(zhuǎn)角信號(hào),滿足測(cè)控系統(tǒng)的應(yīng)用要求。
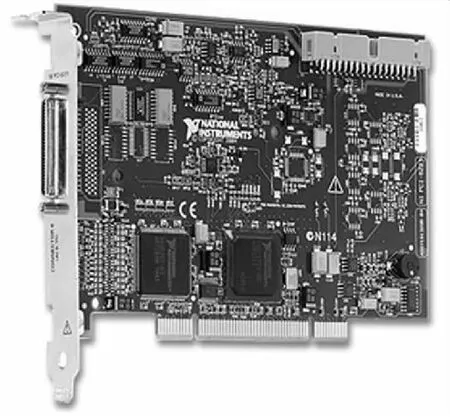
圖4 NI PCI6221數(shù)據(jù)采集卡
2.4 扭矩傳感器
本文采用德國(guó)HBM公司的T22型扭矩傳感器,如圖5所示。基于應(yīng)變的 T22 扭矩傳感器采用非接觸式傳輸技術(shù),量程從 0~0.5 N·m 最大到 0~1 kN·m,精度等級(jí)0.5,它可以直接連接11.5 V到30 V DC電源,輸出模擬信號(hào)范圍為±5V和10±8 mA。T22扭矩傳感器可靠,結(jié)構(gòu)緊湊,結(jié)實(shí),適合旋轉(zhuǎn)和非旋轉(zhuǎn)部件進(jìn)行動(dòng)態(tài)和靜態(tài)扭矩測(cè)量,可非常簡(jiǎn)單地連接到可編程邏輯控制器(PLC),廣泛應(yīng)用于實(shí)驗(yàn)室、測(cè)試臺(tái)、教學(xué)、生產(chǎn)和過(guò)程控制。

圖5 T22型扭矩傳感器
2.5 光電編碼器
光電編碼器是光柵式傳感器,在圓分度和角位移連續(xù)測(cè)量方面有很高的精度,分辨率高,量程大,可實(shí)現(xiàn)動(dòng)態(tài)測(cè)量,具有較強(qiáng)的抗干擾能力。光柵式傳感器在幾何量測(cè)量領(lǐng)域中有著廣泛的應(yīng)用,與長(zhǎng)度和角度測(cè)量有關(guān)的精密儀器都經(jīng)常使用光柵式傳感器。本文采用德國(guó)海德漢公司的ERN120型5000線光電編碼器,如圖6所示。該編碼器自帶正弦掃描信號(hào)的數(shù)字化電路,輸出5V方波信號(hào)TTL,增量信號(hào)由兩路相位差90°的方波脈沖進(jìn)行傳輸,4倍頻后測(cè)量步距可達(dá)0.018°。

圖6 ERN120型光電編碼器
3 基于LabVIEW的測(cè)控系統(tǒng)軟件設(shè)計(jì)
3.1 測(cè)控系統(tǒng)軟件流程圖
測(cè)控系統(tǒng)軟件采用字符串狀態(tài)機(jī)程序架構(gòu),主要由條件結(jié)構(gòu)和一個(gè)While循環(huán)組成,根據(jù)字符串內(nèi)容由條件結(jié)構(gòu)執(zhí)行相應(yīng)的狀態(tài)。測(cè)控系統(tǒng)軟件流程圖如圖7所示。程序啟動(dòng)后,首先初始化設(shè)備和參數(shù),然后進(jìn)行載荷設(shè)置,主要設(shè)置扭矩加載的波形參數(shù)(如波形、幅值、相位、頻率、偏移量等)以及采樣信息;設(shè)置完畢后啟動(dòng)試驗(yàn),通過(guò)計(jì)算機(jī)板卡發(fā)送控制信號(hào)控制電液伺服閥,同時(shí)采集傳感器信號(hào),并將測(cè)量數(shù)據(jù)用曲線顯示,試驗(yàn)結(jié)束后進(jìn)行數(shù)據(jù)保存記錄;當(dāng)按下“EXIT”按鈕時(shí),復(fù)位數(shù)據(jù)采集卡并退出程序[10-12]。
3.2 數(shù)據(jù)采集設(shè)置
硬件驅(qū)動(dòng)程序是應(yīng)用軟件對(duì)硬件的編程接口,它包含著特定硬件可以接受的操作命令,完成與硬件之間的數(shù)據(jù)傳遞。依靠硬件驅(qū)動(dòng)程序可以大大簡(jiǎn)化LabVIEW編程工作,提高開(kāi)發(fā)效率,降低開(kāi)發(fā)成本。本套系統(tǒng)使用軟件LabVIEW2011和NI-DAQmx。
數(shù)據(jù)采集卡的驅(qū)動(dòng)分為內(nèi)置式驅(qū)動(dòng)和外掛式驅(qū)動(dòng),本系統(tǒng)采用NI公司推出的板卡,可以使用LabVIEW內(nèi)部的DAQ 庫(kù)直接對(duì)端口進(jìn)行操作,即內(nèi)置式驅(qū)動(dòng)。
扭矩傳感器信號(hào)采用PCI6221的AI通道進(jìn)行采集,采集設(shè)置如圖8所示。兩路傳感器分別采用AI0和AI1通道進(jìn)行采集,根據(jù)T22扭矩傳感器的輸出電壓,設(shè)置程序采集電壓范圍為±5 V,采樣率為1 kHz。
光電編碼器信號(hào)采用PCI6221的計(jì)數(shù)器通道進(jìn)行采集,采集設(shè)置如圖9所示。兩路光電編碼器分別采用CTR0和CTR1進(jìn)行采集,根據(jù)ERN120型光電編碼器的光柵尺刻線數(shù)量,設(shè)置程序每轉(zhuǎn)一周為5 000個(gè)脈沖,設(shè)置解碼類型為X4,即4倍頻解碼,可實(shí)現(xiàn)最小步距角為0.018°的旋轉(zhuǎn)角度測(cè)量[13-14]。
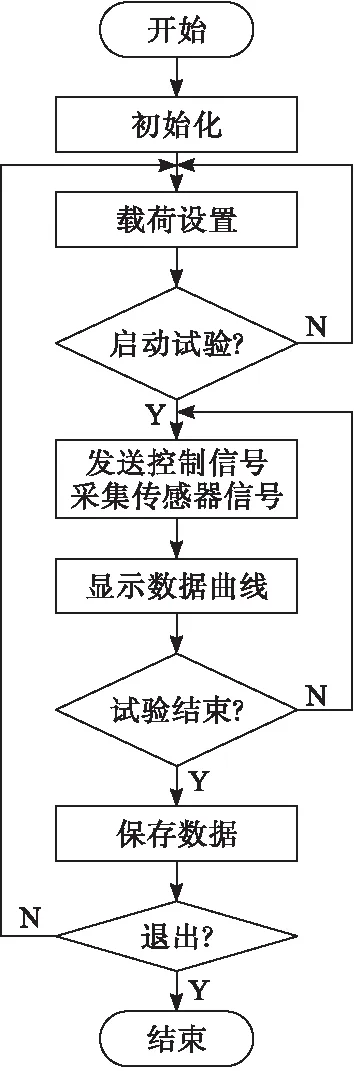
圖7 測(cè)控系統(tǒng)軟件流程圖

圖8 AI通道任務(wù)設(shè)置
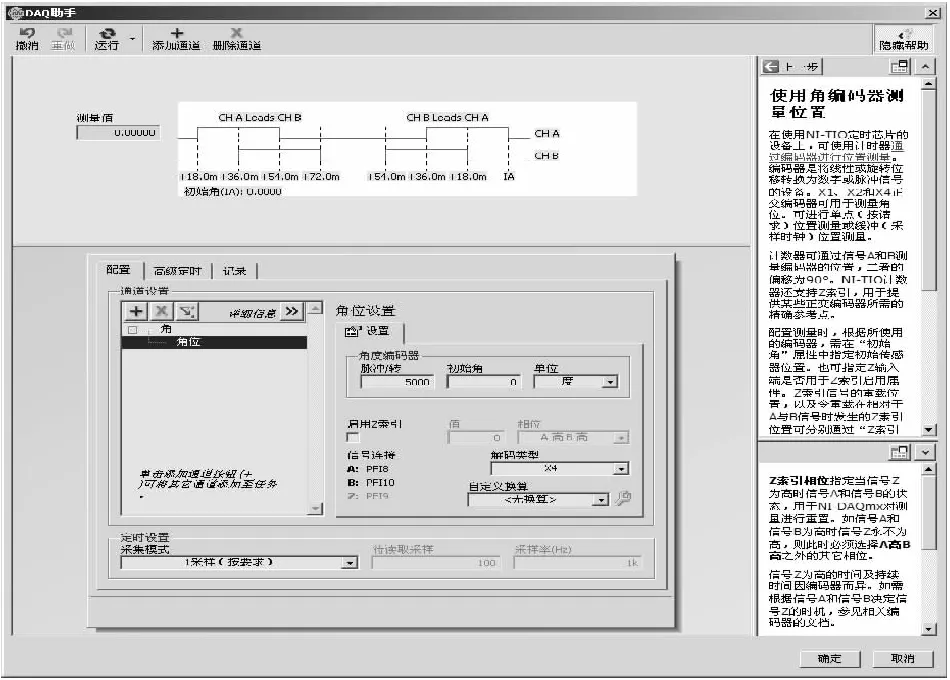
圖9 計(jì)數(shù)器任務(wù)設(shè)置
控制信號(hào)采用PCI6221的AO通道進(jìn)行發(fā)送,采集設(shè)置如圖10所示。兩路控制信號(hào)分別采用AO0和AO1通道進(jìn)行傳輸,根據(jù)電磁閥控制電壓的范圍,設(shè)置程序輸出電壓范圍為±5V,采樣率為1kHz。
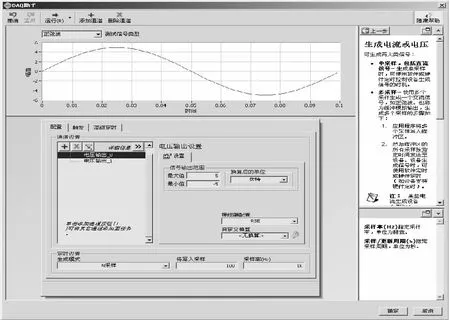
圖10 AO通道任務(wù)設(shè)置
任務(wù)設(shè)置完成后,在測(cè)控軟件的程序框圖選擇相應(yīng)任務(wù)進(jìn)行讀取和寫(xiě)入操作,實(shí)現(xiàn)測(cè)量信號(hào)的采集與控制信號(hào)的發(fā)送。
3.3 測(cè)控系統(tǒng)軟件界面與代碼
測(cè)控系統(tǒng)軟件界面如圖11所示。軟件界面中可以清晰展示載荷設(shè)置的參數(shù),如信號(hào)類型、頻率、相位、幅值等,右上角的波形控件展示了載荷設(shè)置波形曲線,界面下方顯示了試驗(yàn)過(guò)程中采集的轉(zhuǎn)角變化曲線和扭矩變化曲線。
測(cè)控系統(tǒng)軟件程序框圖如圖12所示,狀態(tài)機(jī)主要分為初始化、載荷設(shè)置、自動(dòng)加載試驗(yàn)、保存數(shù)據(jù)和退出五個(gè)狀態(tài)。運(yùn)行程序后,進(jìn)入“初始化”狀態(tài);如圖12(a)所示,在“初始化”狀態(tài)對(duì)軟件前面板顯示控件進(jìn)行清空,然后進(jìn)入“載荷設(shè)置”狀態(tài),如圖12(b)所示;在圖11中的“載荷設(shè)置”區(qū)域選擇波形和調(diào)節(jié)參數(shù),可在“載荷波形”控件中觀察試驗(yàn)應(yīng)當(dāng)加載的扭矩載荷曲線,按下界面右上角的“啟動(dòng)試驗(yàn)”按鈕后,進(jìn)入“自動(dòng)加載試驗(yàn)”狀態(tài);如圖12(c)所示,“自動(dòng)加載試驗(yàn)”狀態(tài)中,按照扭矩載荷曲線,輸出2路AO控制信號(hào),同時(shí)采集2路AI扭矩傳感器和2路光電編碼器,獲得角位移并計(jì)算轉(zhuǎn)角差,顯示在界面下方的曲線控件中;試驗(yàn)完畢后進(jìn)入“保存數(shù)據(jù)”狀態(tài),如圖12(d)所示,將試驗(yàn)中采集的扭矩和轉(zhuǎn)角數(shù)據(jù)存入D盤(pán)電子表格中;加載試驗(yàn)可以重復(fù)進(jìn)行,當(dāng)按下界面右上角的“退出”按鈕后,進(jìn)入“退出”狀態(tài),如圖12(e)所示,進(jìn)行數(shù)據(jù)采集設(shè)備復(fù)位,并退出程序。
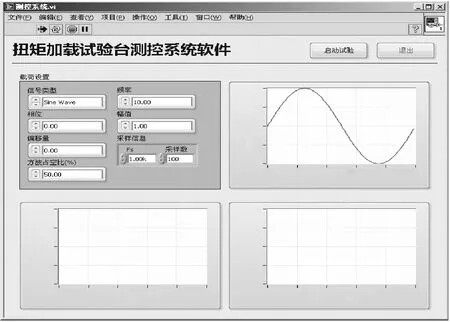
圖11 測(cè)控系統(tǒng)軟件界面
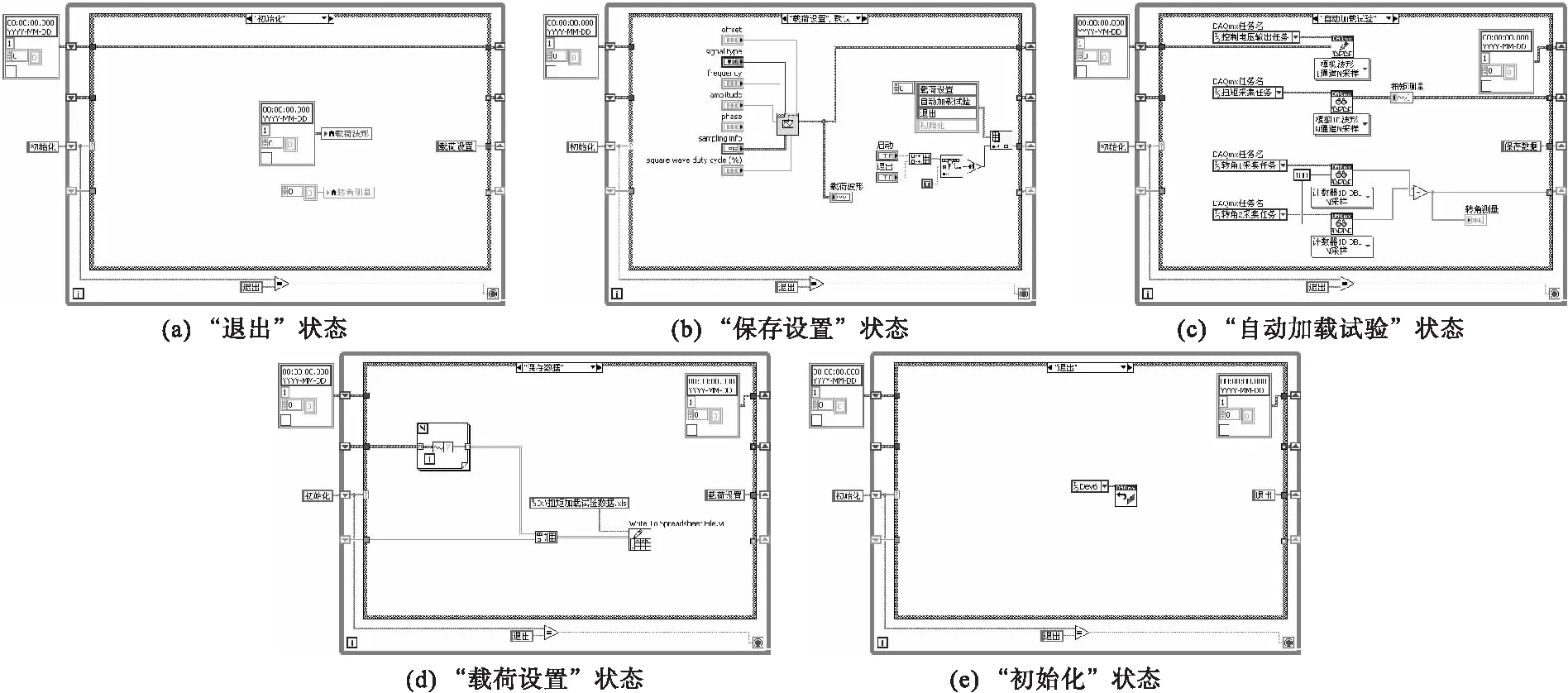
圖12 測(cè)控系統(tǒng)軟件程序框圖
4 總 結(jié)
本文設(shè)計(jì)了一套基于LabVIEW的電液伺服加載試驗(yàn)臺(tái)測(cè)控系統(tǒng)[15]。該系統(tǒng)采用NI PCI6221多功能數(shù)據(jù)采集卡,結(jié)合各種傳感器和工業(yè)計(jì)算機(jī),搭建測(cè)控系統(tǒng)硬件平臺(tái);以美國(guó)國(guó)家儀器公司的LabVIEW為軟件開(kāi)發(fā)平臺(tái),設(shè)計(jì)并編寫(xiě)了基于狀態(tài)機(jī)程序架構(gòu)的測(cè)控系統(tǒng)軟件,設(shè)計(jì)了友好的用戶交互界面,能夠完成轉(zhuǎn)軸類零件的扭矩自動(dòng)加載試驗(yàn),并進(jìn)行試驗(yàn)臺(tái)參數(shù)實(shí)時(shí)監(jiān)測(cè)、試驗(yàn)數(shù)據(jù)顯示和記錄保存。該系統(tǒng)具有開(kāi)發(fā)周期短,操作簡(jiǎn)單,穩(wěn)定性高,擴(kuò)展型好,可維護(hù)性好,便于應(yīng)用推廣[16]。
猜你喜歡
少先隊(duì)活動(dòng)(2021年4期)2021-07-23 01:46:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
攝影之友(影像視覺(jué))(2019年3期)2019-03-30 01:36:50
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中國(guó)艦船研究(2014年5期)2014-05-14 06:43:09
